
磁瓦成型后柔性转移机械手臂.pdf

一条****杉淑


1/9
2/9
3/9
4/9
5/9
6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

磁瓦成型后柔性转移机械手臂.pdf
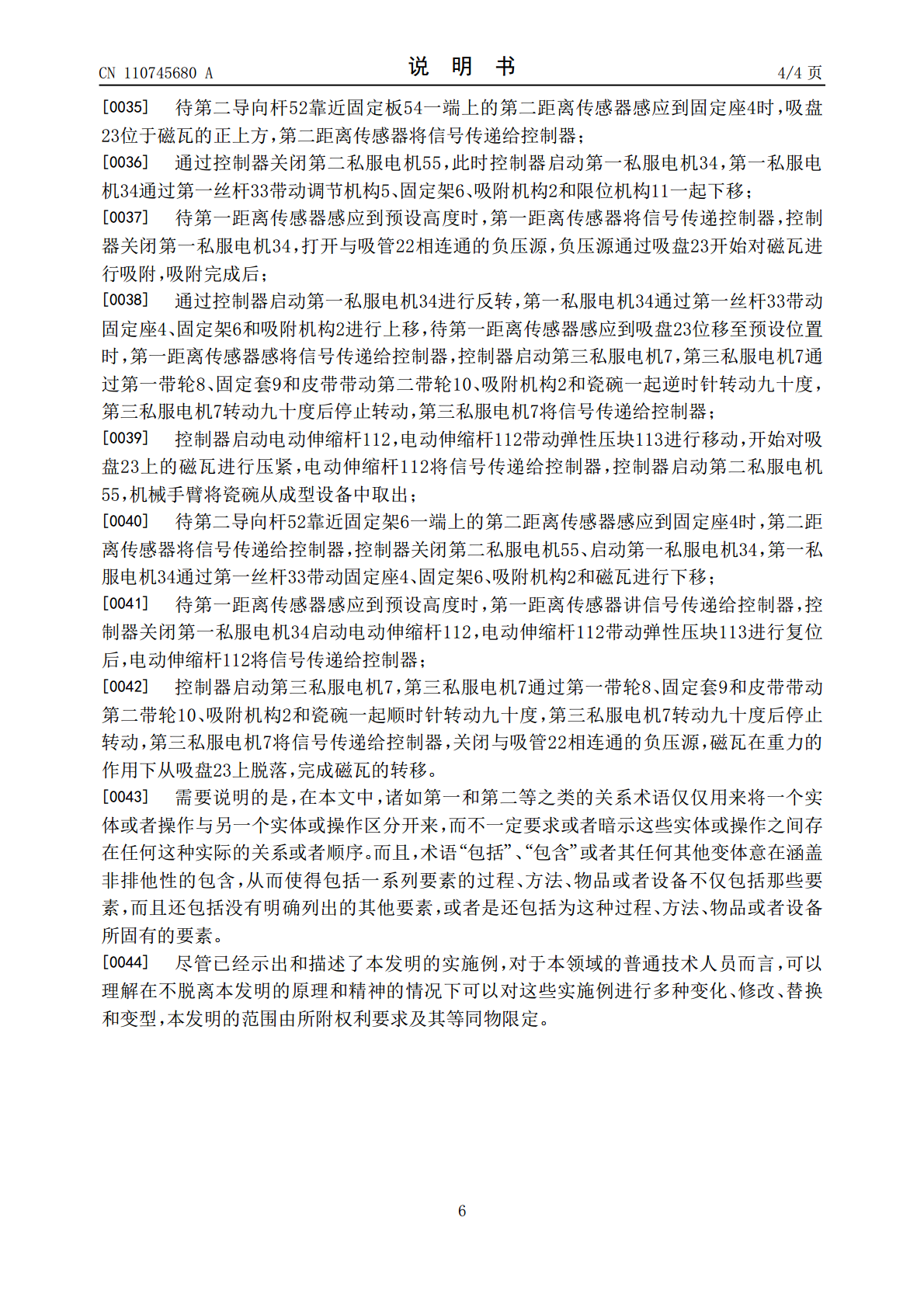
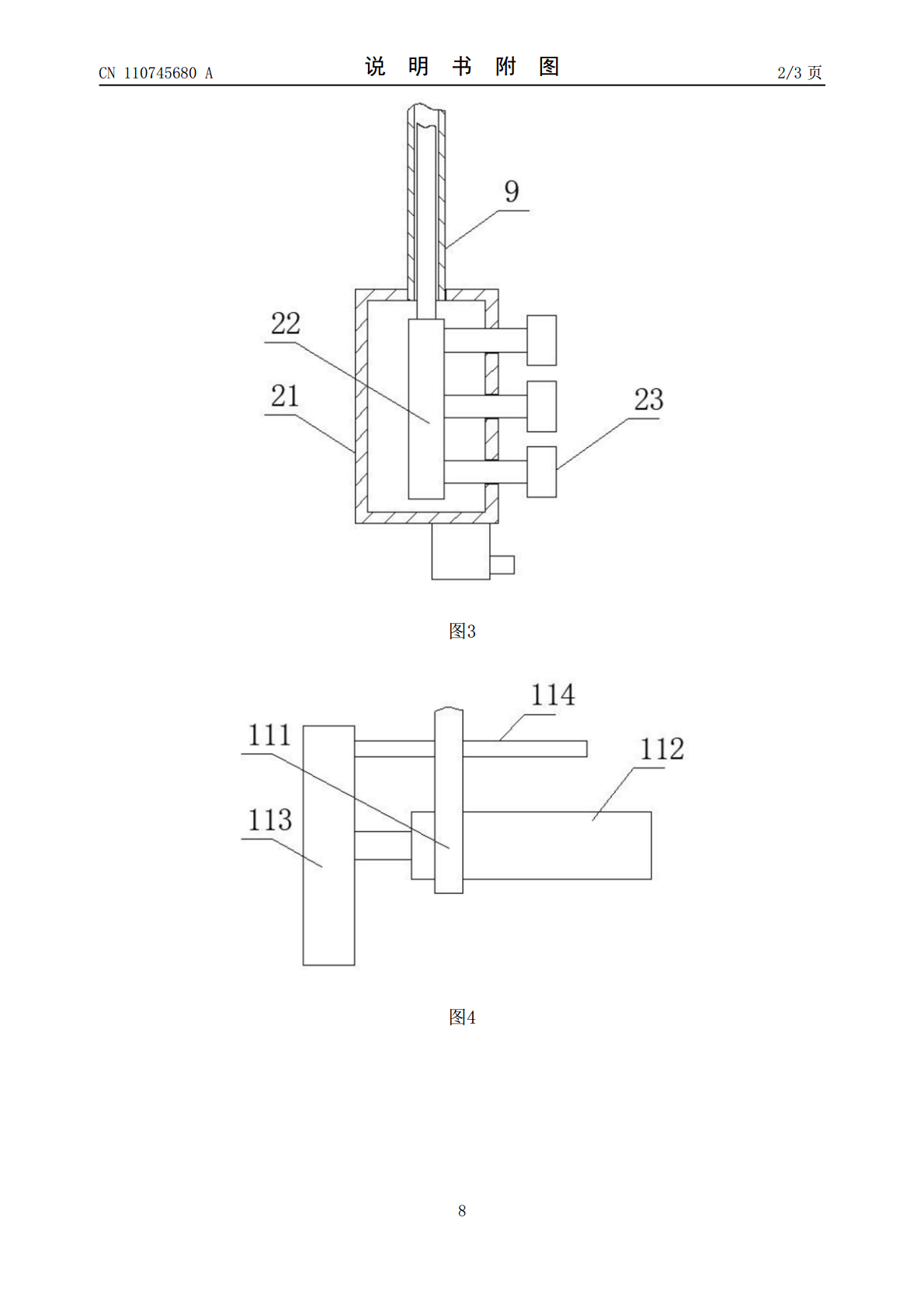
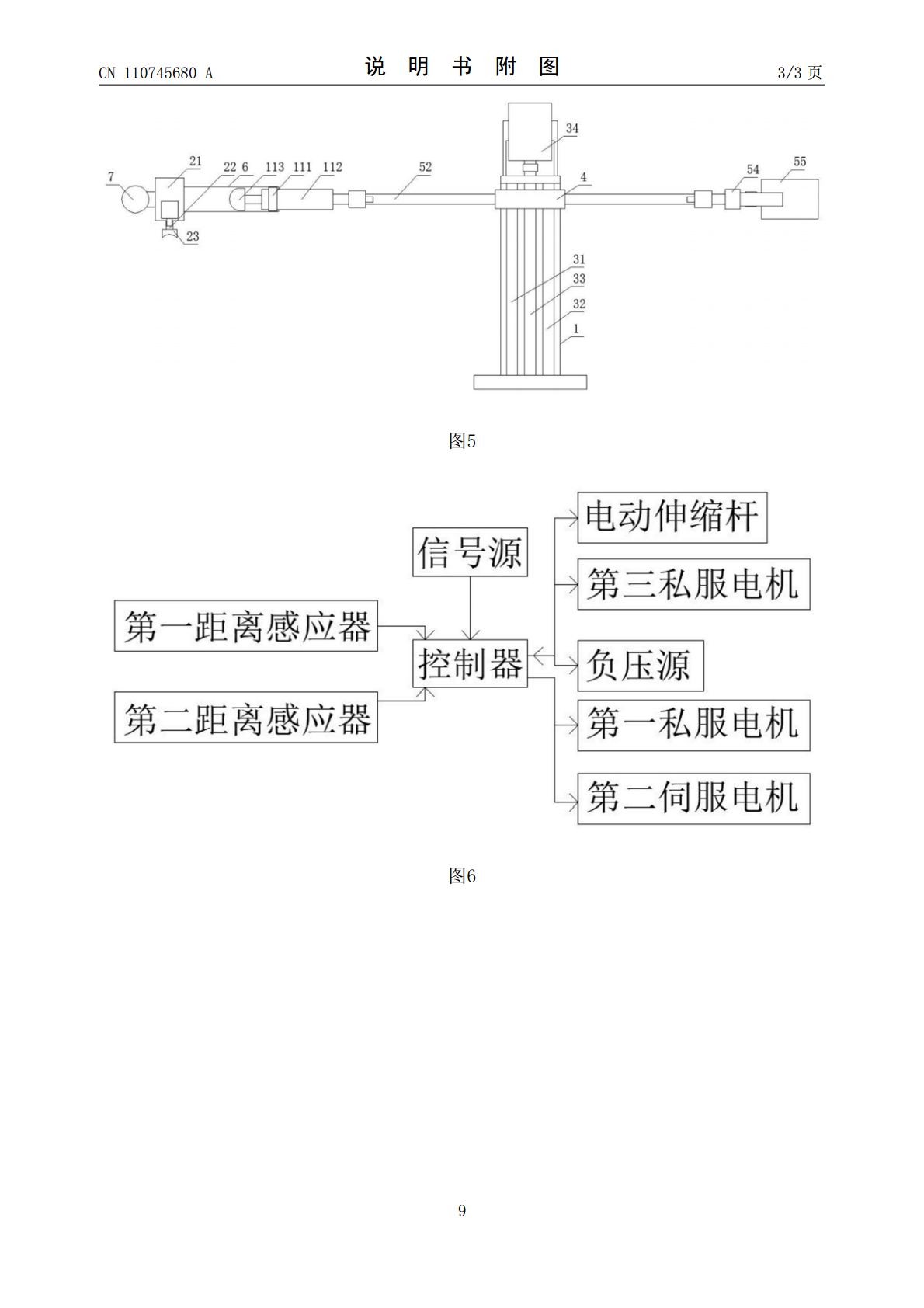
本发明涉及磁瓦加工技术领域,且公开了磁瓦成型后柔性转移机械手臂,包括一侧固定安装有控制器的机架和与负压源相连通的吸附机构,机架的内部固定安装有升降机构,升降机构的中部传动连接有固定座,固定座的内部传动连接有调节机构。该磁瓦成型后柔性转移机械手臂,通过控制器、第三私服电机、第一带轮、固定套和第二带轮的配合使用,使得吸盘吸附胚体之后,机械手臂可以通过第三私服电机的驱动调整胚体的位置,同时通过电动伸缩杆、弹性压块和限位杆的配合使用,使得机械手臂可以对位置调整之后的胚体进行压紧限位,使得胚体能够紧贴在吸盘上,防止

用于树脂瓦成型后的冷却辊组.pdf
本发明涉及一种用于树脂瓦成型后的冷却辊组,包括主动辊组和从动辊组,主动辊组包括水平设置的主动辊,主动辊为空心结构,在主动辊的左右两端均套装有轴承,在轴承上均套装有支承体,从动辊组包括从动辊,从动辊为空心结构,在从动辊的左右两端均套装有轴承,在轴承上均套装有定位套,在轴承的外侧均设置有将轴承压紧的第一齿轮,第一齿轮均安装在从动辊上,在第一齿轮的下方均设置有与其相互啮合的第二齿轮,在第二齿轮内水平穿装有销轴,销轴通过轴承安装在第二齿轮内,在销轴的右侧设置有连接板;连接板的一端固定在销轴上,其另一端固定在定位套

磁瓦成型前的制备泥片的真空加工设备.pdf
本发明涉及磁瓦加工设备技术领域,且公开了磁瓦成型前的制备泥片的真空加工设备,包括设备本体,设备本体包括底座,底座内部背部固定设置有第一电机,第一电机的输出轴固定设置有齿轮,齿轮啮合连接有齿板,齿板滑动设置于底座内顶部;通过在箱体外壁一侧安装真空泵,真空泵的进风口通过管道与箱体连通,真空泵的出风口连通有管道,使箱体内部处于真空的状态,通过安装第一电机带动齿轮旋转,通过齿轮和齿板的配合带动移动杆移动,继而带动箱体移动,方便人们进行使用;通过安装第二电机和气缸,第二电机通过固定柱带动升降杆上下移动,便于对放置箱
手臂式转移床.pdf
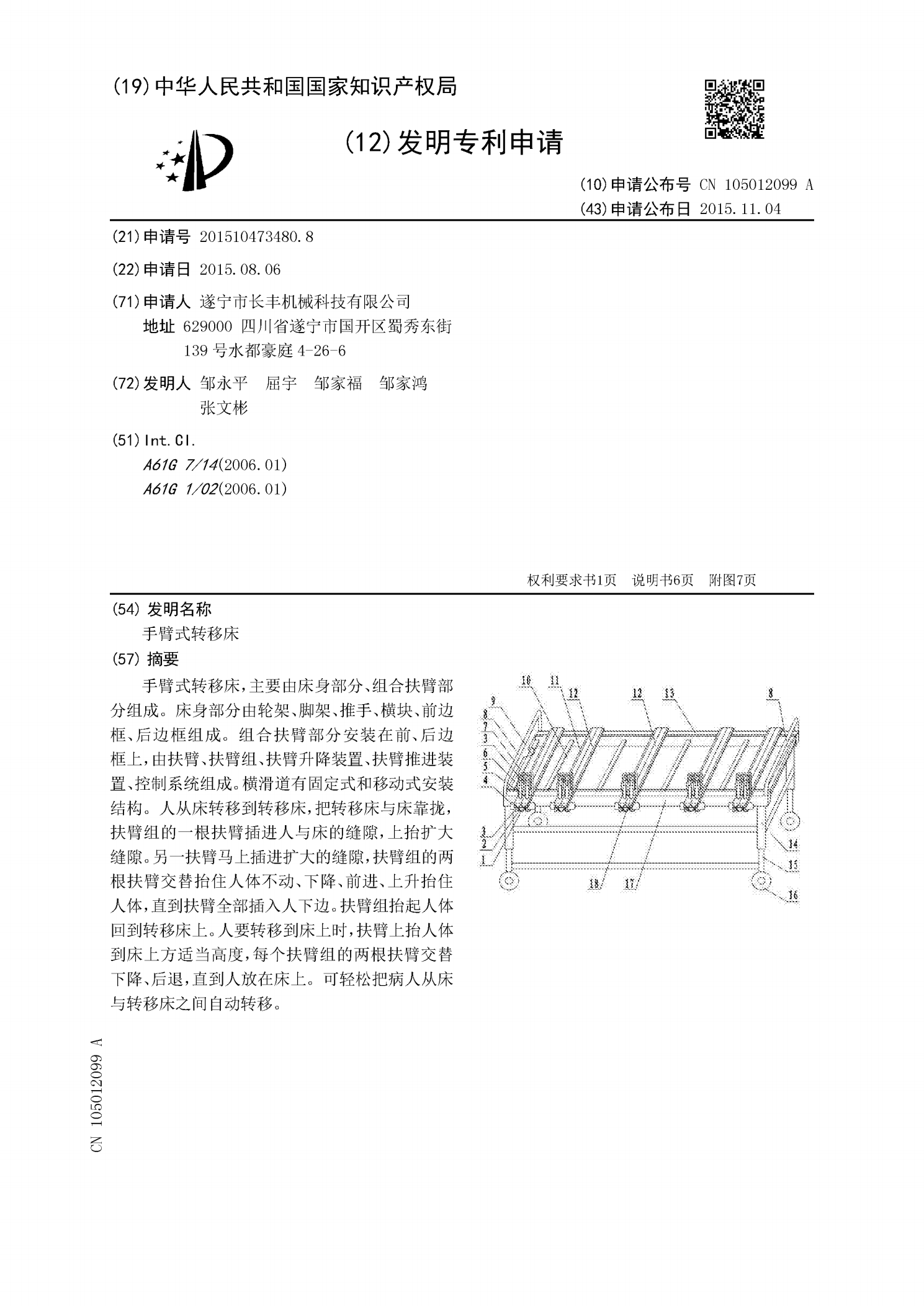
手臂式转移床,主要由床身部分、组合扶臂部分组成。床身部分由轮架、脚架、推手、横块、前边框、后边框组成。组合扶臂部分安装在前、后边框上,由扶臂、扶臂组、扶臂升降装置、扶臂推进装置、控制系统组成。横滑道有固定式和移动式安装结构。人从床转移到转移床,把转移床与床靠拢,扶臂组的一根扶臂插进人与床的缝隙,上抬扩大缝隙。另一扶臂马上插进扩大的缝隙,扶臂组的两根扶臂交替抬住人体不动、下降、前进、上升抬住人体,直到扶臂全部插入人下边。扶臂组抬起人体回到转移床上。人要转移到床上时,扶臂上抬人体到床上方适当高度,每个扶臂组的

瓦坯机械成型连续工艺线.docx
瓦坯机械成型连续工艺线瓦坯机械成型连续工艺线摘要:瓦坯机械成型连续工艺线是一种高效率、高精度的瓦坯生产工艺。本论文从瓦坯的机械成型工艺、连续工艺线的组成和工作原理、优势和应用前景等方面进行研究和分析。本研究结果表明,瓦坯机械成型连续工艺线具有高度的自动化程度、快速的生产速度、高精度的成型效果、复杂形状的成型能力等优点,适用于批量生产各种类型的瓦坯,具有广阔的市场应用前景。关键词:瓦坯;机械成型;连续工艺线;优势;应用前景1.引言瓦坯是建筑材料中常见的一种,广泛应用于房屋和建筑结构的墙体、屋顶和地面。传统的