
一种基于三维点云轮廓分维值的植物识别分类方法.pdf

一条****ee


1/10

2/10

3/10
4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于三维点云轮廓分维值的植物识别分类方法.pdf
本发明提供的一种基于三维点云轮廓分维值的植物识别分类方法,使用三维激光扫描仪快速高效的获取被测物体表面的三维信息,通过闵可夫斯基维数法计算植物轮廓点云数据的分维值,利用植物三维点云轮廓分维值区分植物种类,智能化程度高,植物识别高效准确,是获取物体空间三维坐标信息的全新科技手段,通过三维激光扫描仪获取植物的三维信息,在将植物识别工作由室外转向室内的同时,利用植物的三维信息提取出植物特征,利用植物特征实现植物分类,基于三维点云轮廓分维值的植物识别分类方法工作量小,分类速度块,效率高、成本低、出错少,植物识别分
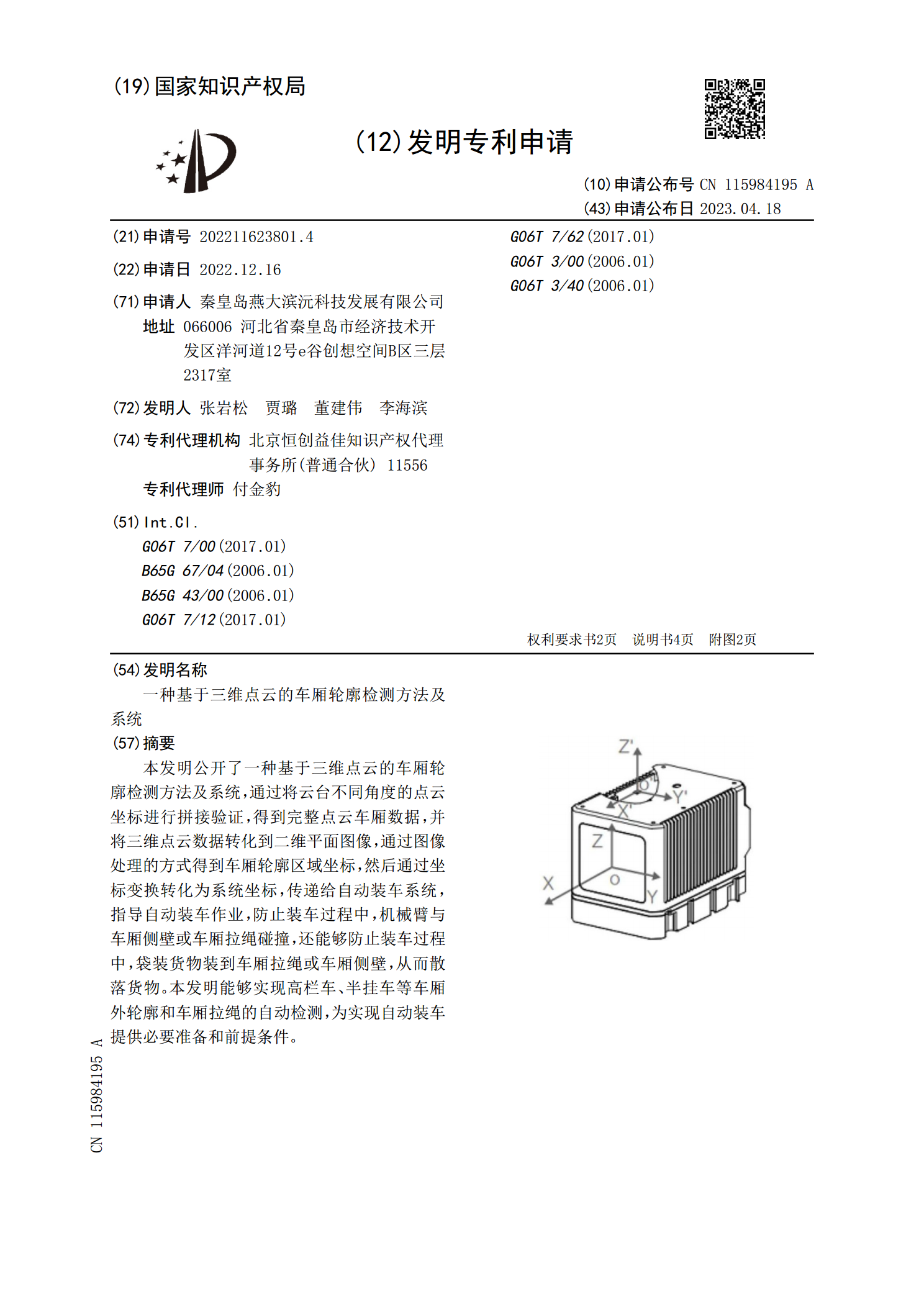
一种基于三维点云的车厢轮廓检测方法及系统.pdf
本发明公开了一种基于三维点云的车厢轮廓检测方法及系统,通过将云台不同角度的点云坐标进行拼接验证,得到完整点云车厢数据,并将三维点云数据转化到二维平面图像,通过图像处理的方式得到车厢轮廓区域坐标,然后通过坐标变换转化为系统坐标,传递给自动装车系统,指导自动装车作业,防止装车过程中,机械臂与车厢侧壁或车厢拉绳碰撞,还能够防止装车过程中,袋装货物装到车厢拉绳或车厢侧壁,从而散落货物。本发明能够实现高栏车、半挂车等车厢外轮廓和车厢拉绳的自动检测,为实现自动装车提供必要准备和前提条件。

一种静脉轮廓三维点云匹配的身份识别方法及装置.pdf
本发明公开一种静脉轮廓三维点云匹配的身份识别方法及装置,通过静脉轮廓识别装置获取到手指静脉图像;根据图像质量评价获得指定区域的最优图像,有效地排除周围环境的干扰,选取最优的静脉图像作为原始数据;采用图像处理方法,获得指定区域的手指静脉轮廓线,其他则设为背景;根据双目原理,将其转换为三维视差图像;将视差图像转换为三维点云;采用基于迭代最近点的点云匹配算法进行匹配,实现身份认证和识别;本发明基于手指静脉轮廓的全部三维点云进行匹配,提高了目前基于特征点的相关信息匹配精度和灵敏度,并解决了因手指扰动造成的二维图像

一种搜索三维点云数据轮廓噪声点的方法.pdf
本发明提供了一种搜索三维点云数据轮廓噪声点的方法,本方法对基于光学面扫描三维测量系统得到的三维点云数据的轮廓表面噪声点进行搜索;包括对三维点云数据的轮廓表面的边远噪声点进行搜索并删除;对三维点云数据中的所有点的法向矢量进行计算,搜索三维点云数据轮廓噪声点等步骤。本发明实现了良好的人机交互功能,可以高效、准确地搜索到三维点云数据轮廓噪声点,为点云数据质量的提高提供了一种有效的方法。在具体实现时,将搜索到的噪声点首先标记为与其它数据点不同的颜色,以示区分,并将其存入特定的动态数组中。最后,如确认可以删除,则将

一种基于二维几何轮廓的点云姿态识别方法.pdf
本发明公开了一种基于二维几何轮廓的点云姿态识别方法,该方法的步骤包括:获取场景的三维点云、二维图片、以及由二维图片转换到三维点云所对应的单应性映射矩阵;从二维图片中提取目标物体二维轮廓;对目标物体二维轮廓进行几何特征检测,提取得到具有几何形状特征的轮廓;通过单应性矩阵将具有几何形状特征的轮廓转换为三维点云;根据几何轮廓转换后的三维点云信息,提取场景的三维点云对应的感兴趣区域点云;提取感兴趣区域点云中的平面;估计平面的法线,将平面的中心坐标设置为姿态的位置信息,将平面的法线设置为姿态的方向信息。本发明结合了