
基于计算机视觉的电梯轿厢内异常行为的检测方法.pdf

宜然****找我

1/10

2/10

3/10

4/10

5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共31页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于计算机视觉的电梯轿厢内异常行为检测.docx
基于计算机视觉的电梯轿厢内异常行为检测一、引言随着城市化进程的不断加速,人口密集度的不断提高,现代化的社会生活方式的推进,综合楼宇已成为人们居住、工作、娱乐、购物等多种需求的集中体现,而电梯作为一种现代化的交通工具,也是综合楼宇中必不可少的设施之一。然而过于频繁的电梯使用与繁杂的人流交织,也带来了电梯轿厢内异常行为检测等安全问题。因此,基于计算机视觉的电梯轿厢内异常行为检测,成为了现代楼宇安全领域中备受关注的研究方向。二、现有问题及其挑战在电梯轿厢内,一些异常行为常常会引起安全问题。例如,打架、拉扯、推搡

基于计算机视觉的电梯轿厢内异常行为的检测方法.pdf
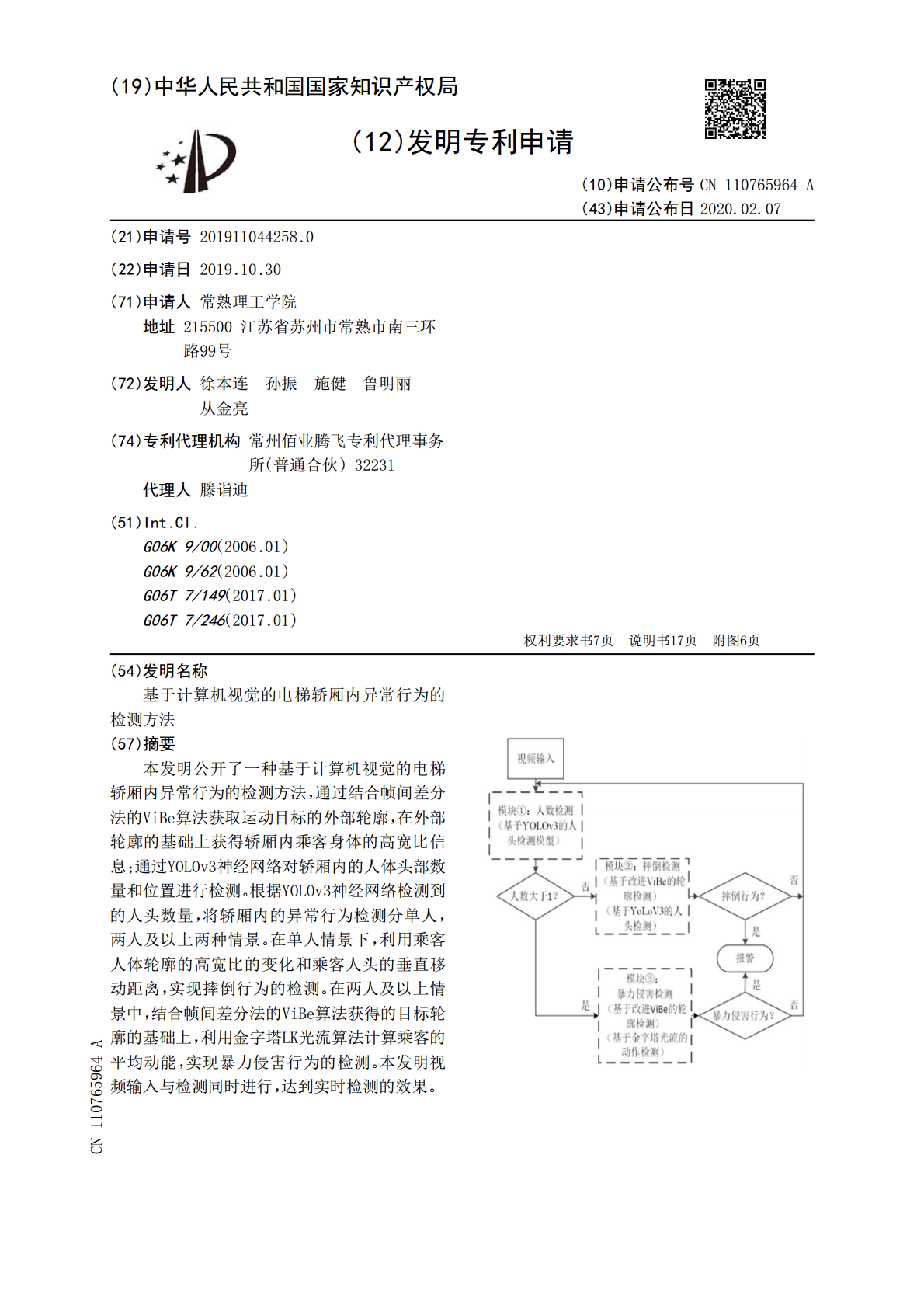
本发明公开了一种基于计算机视觉的电梯轿厢内异常行为的检测方法,通过结合帧间差分法的ViBe算法获取运动目标的外部轮廓,在外部轮廓的基础上获得轿厢内乘客身体的高宽比信息;通过YOLOv3神经网络对轿厢内的人体头部数量和位置进行检测。根据YOLOv3神经网络检测到的人头数量,将轿厢内的异常行为检测分单人,两人及以上两种情景。在单人情景下,利用乘客人体轮廓的高宽比的变化和乘客人头的垂直移动距离,实现摔倒行为的检测。在两人及以上情景中,结合帧间差分法的ViBe算法获得的目标轮廓的基础上,利用金字塔LK光流算法计算

基于计算机视觉的电梯轿厢内异常行为检测的开题报告.docx
基于计算机视觉的电梯轿厢内异常行为检测的开题报告一、选题背景随着城市化进程的不断加快,高层建筑和电梯的数量也不断增加。电梯作为现代社会必不可少的交通工具,其在人们的日常出行和生活中扮演着重要的角色。但在电梯轿厢内,由于空间相对狭小、人员密集,一旦发生异常事件,如人员拥挤、摔倒等,往往会导致严重的后果。因此,开发一种能够检测电梯轿厢内异常行为的系统,意义重大。本文基于计算机视觉技术,致力于开发一种电梯轿厢内异常行为检测系统。二、研究目的本研究的主要目的是开发一种基于计算机视觉的电梯轿厢内异常行为检测系统,以

基于计算机视觉的电梯轿厢内异常行为检测的任务书.docx
基于计算机视觉的电梯轿厢内异常行为检测的任务书一、任务背景电梯是现代社会重要的交通工具之一,其安全性和舒适性对用户来说至关重要。由于电梯轿厢是一个相对封闭的空间,因此轿厢内发生异常事件时,可能会对用户造成极大的威胁,例如盗窃、恐怖袭击等事件。因此,我们需要一种有效的方法来检测轿厢内的异常行为,及时发现和处理异常事件,确保电梯的安全性和用户的舒适性。近年来,由于计算机视觉技术的快速发展,基于计算机视觉的轿厢内异常行为检测成为了解决这一问题的有效方法。计算机视觉技术可以通过对轿厢内视频数据进行分析和处理,识别
基于视频分析的电梯轿厢内异常行为检测研究.pptx
汇报人:CONTENTS添加章节标题研究背景和意义电梯安全的重要性异常行为检测的必要性研究目的和意义相关研究综述视频分析技术的研究现状异常行为检测算法的研究现状相关研究的局限性和不足研究内容和方法研究内容概述研究方法和技术路线数据采集和处理方法实验设计和实施过程实验结果和讨论实验结果展示和分析结果与相关研究的比较和分析结果的讨论和解释本研究的贡献和价值结论和展望研究结论总结研究成果的应用和推广价值对未来研究的建议和展望汇报人: