
摆动式车辆.pdf

淑然****by

1/10
2/10
3/10

4/10

5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共37页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
摆动式车辆.pdf
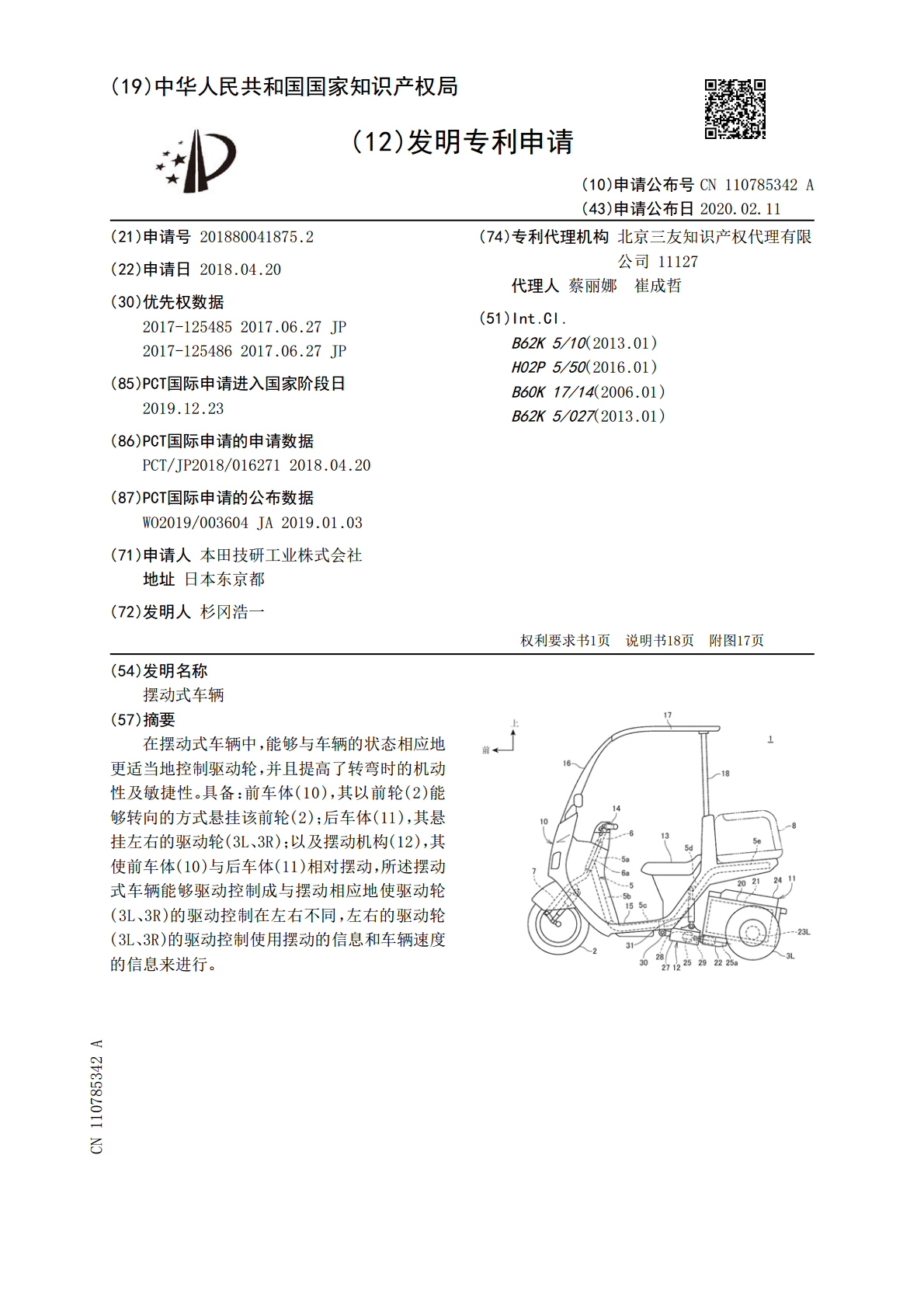
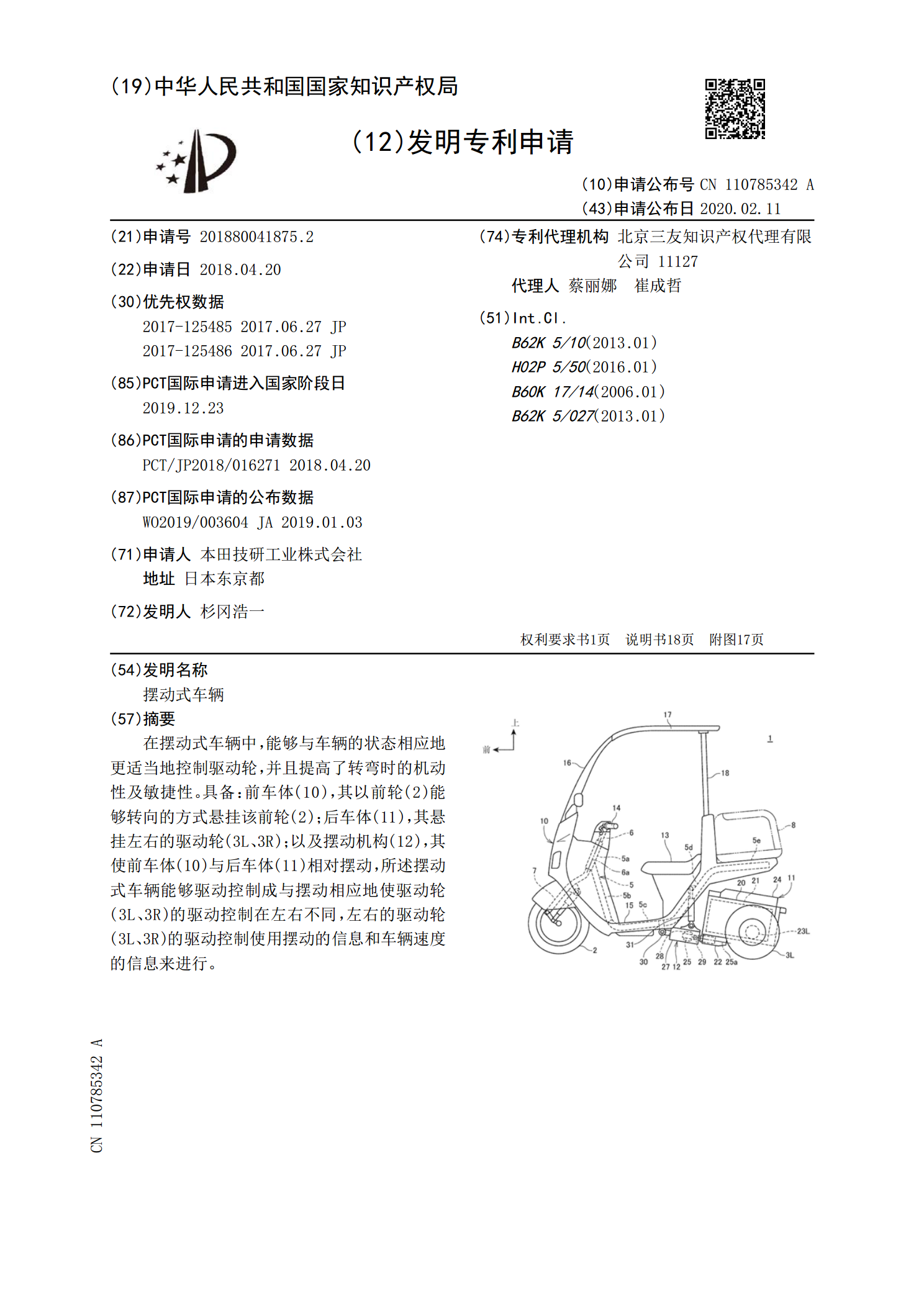
在摆动式车辆中,能够与车辆的状态相应地更适当地控制驱动轮,并且提高了转弯时的机动性及敏捷性。具备:前车体(10),其以前轮(2)能够转向的方式悬挂该前轮(2);后车体(11),其悬挂左右的驱动轮(3L、3R);以及摆动机构(12),其使前车体(10)与后车体(11)相对摆动,所述摆动式车辆能够驱动控制成与摆动相应地使驱动轮(3L、3R)的驱动控制在左右不同,左右的驱动轮(3L、3R)的驱动控制使用摆动的信息和车辆速度的信息来进行。
摆动式车辆.pdf
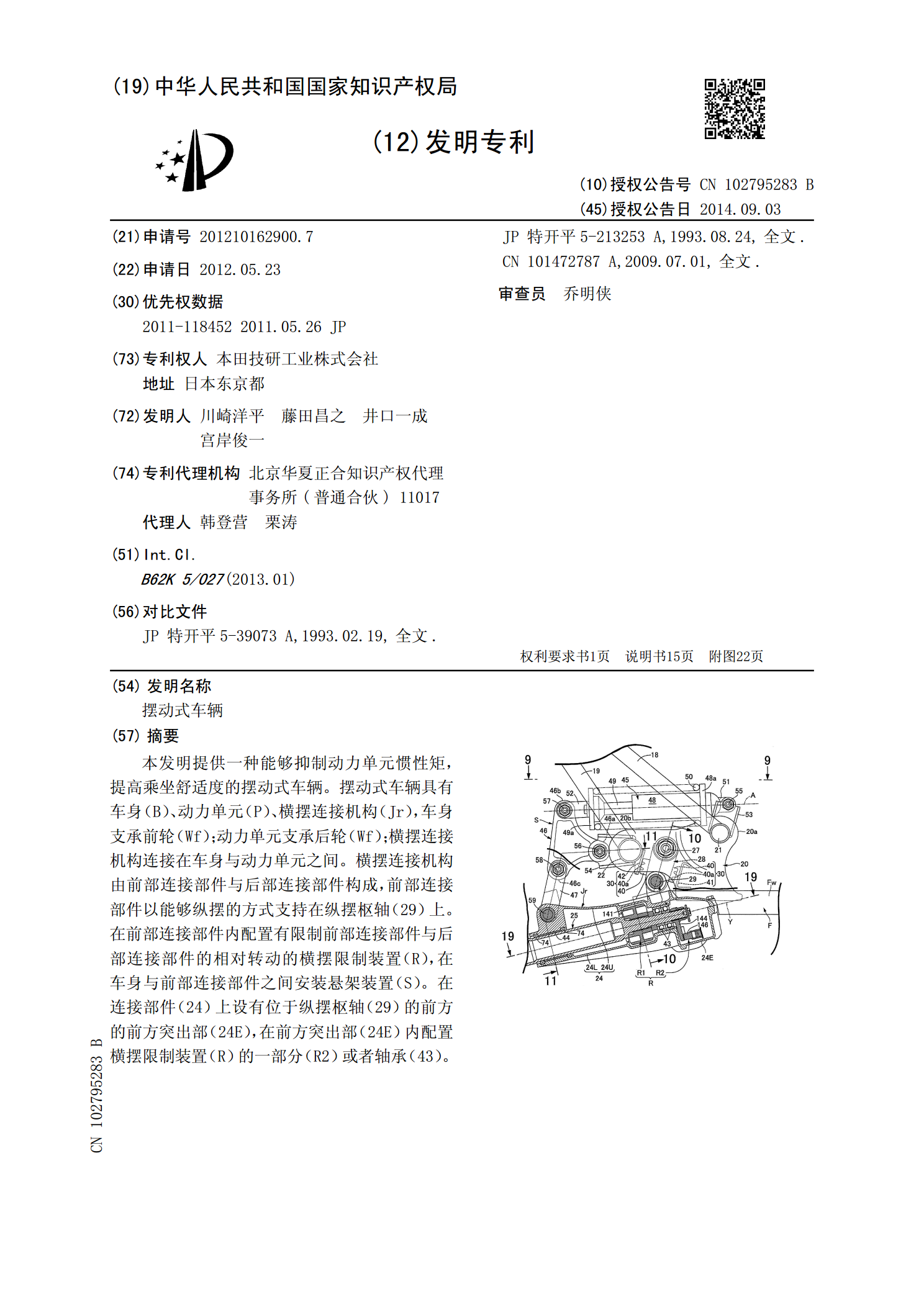
本发明提供一种能够抑制动力单元惯性矩,提高乘坐舒适度的摆动式车辆。摆动式车辆具有车身(B)、动力单元(P)、横摆连接机构(Jr),车身支承前轮(Wf);动力单元支承后轮(Wf);横摆连接机构连接在车身与动力单元之间。横摆连接机构由前部连接部件与后部连接部件构成,前部连接部件以能够纵摆的方式支持在纵摆枢轴(29)上。在前部连接部件内配置有限制前部连接部件与后部连接部件的相对转动的横摆限制装置(R),在车身与前部连接部件之间安装悬架装置(S)。在连接部件(24)上设有位于纵摆枢轴(29)的前方的前方突出部(2

倒置摆动式车辆.pdf
一种倒置摆动式车辆,包括:车辆主体框架;包括配置成形成环的多个可转动从动滚子的主轮以及被支承以便在车辆主体框架上转动的一对左右驱动盘。每个驱动盘包括布置成以扭转关系与从动滚子接触的多个可转动驱动滚子。车辆还包括设置在驱动盘的外侧上的一对左右从动滑轮以及在主轮的上方附接到车辆主体框架并包括具有附接驱动滑轮的输出动力轴的马达的一对左右驱动单元。环形传送构件使驱动滑轮和从动滑轮互连。左右驱动单元彼此以竖直偏移关系布置。

倒置摆动式车辆.pdf
一种倒置摆动式车辆包括:具有主轮的行驶单元;其上支承有所述主轮的车辆主体框架;以及支承在所述车辆主体框架上以便驱动所述主轮的一对左右驱动单元。所述车辆还包括用于将电力供应到所述驱动单元的电池单元、用于在其上支承驾驶员的座椅以及用于支承所述座椅以便选择地向上和向下运动的伸缩支柱。伸缩支柱在车辆主体的前后方向上布置在驱动单元和电池单元之间。

摆动式车辆的踏板装置.pdf
本发明提供一种摆动式三轮摩托车的踏板装置,在用于两人乘坐的摆动式车辆的车身的左右两侧部设置有后座踏板,该后座踏板供跨坐在车座后部的同乘者使用,能够避免防止后座踏板上的同乘者的脚与动力单元产生干涉。上述摆动式三轮摩托车的踏板装置,其具有对左右一对后轮(Wr)进行支承并对该左右一对后轮进行驱动的动力单元(P),还具有车身(S),由该车身对前轮(Wf)进行支承且该前轮能够转向,该车身连接在该动力单元上且能摆动,该车身具有乘车用的车座(7),在该车身的左右两侧部设置有后座踏板(12),该后座踏板供跨坐在上述车座的