
一种风力发电机组的光影闪烁控制方法.pdf

志玉****爱啊

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种风力发电机组的光影闪烁控制方法.pdf
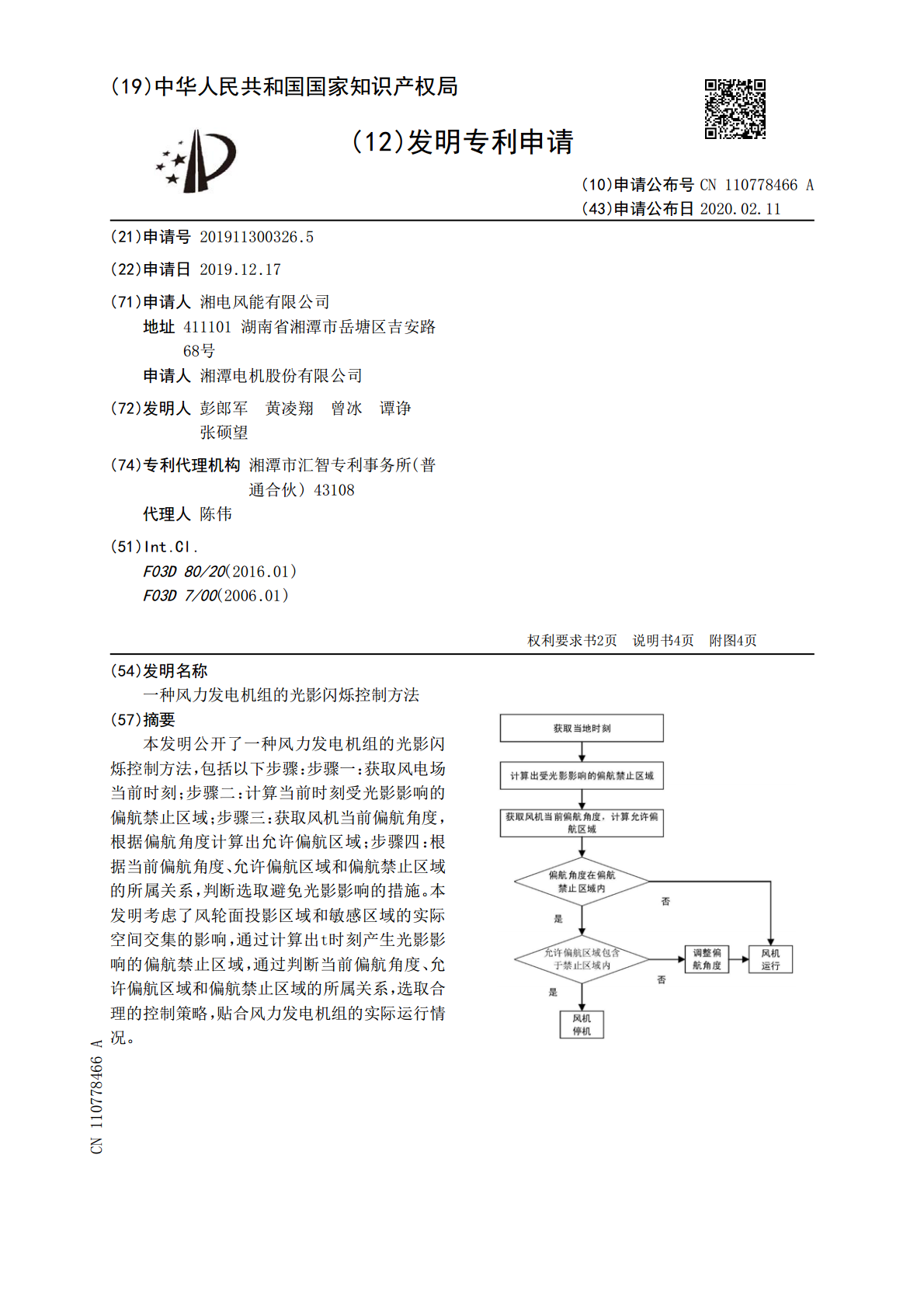
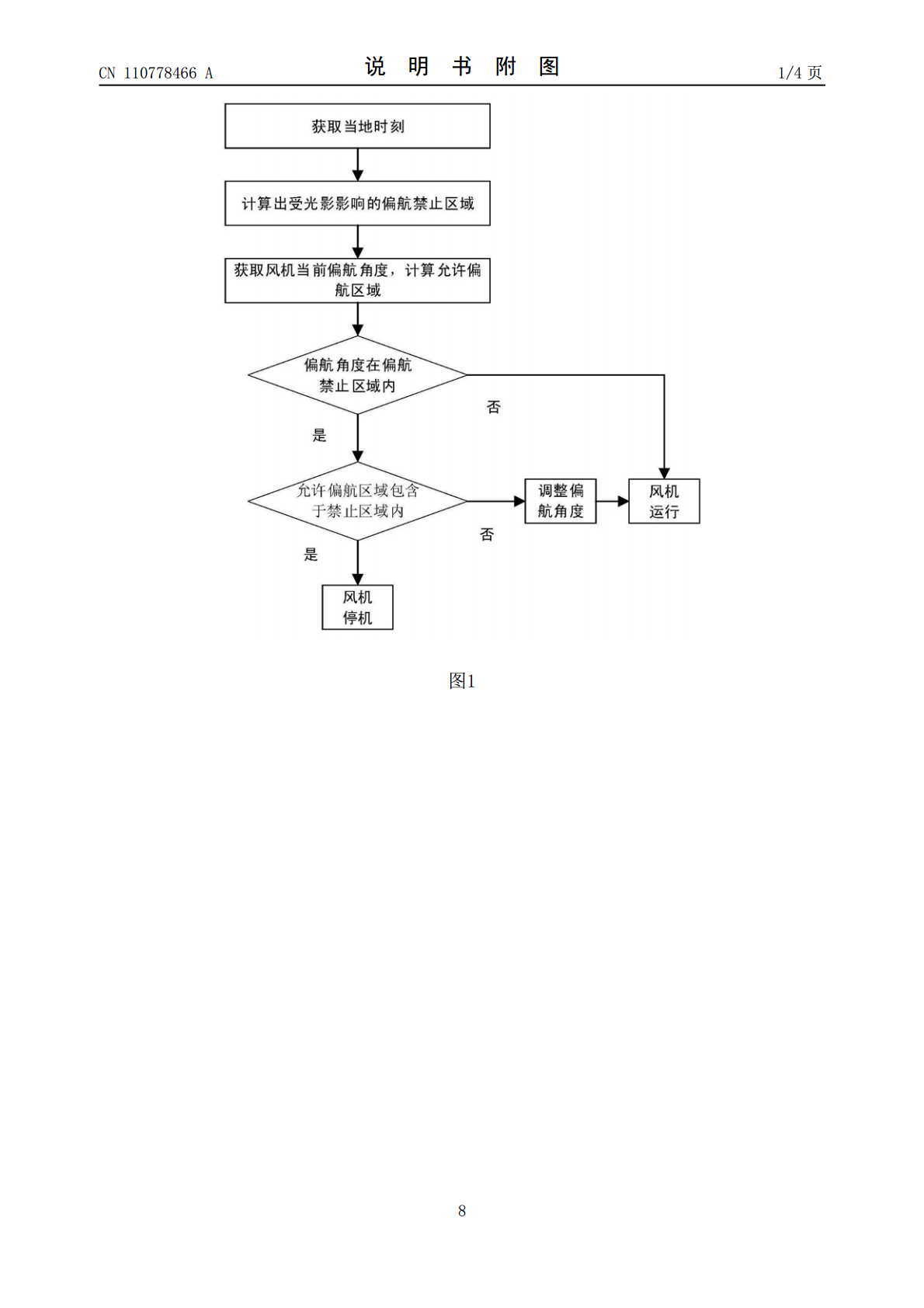
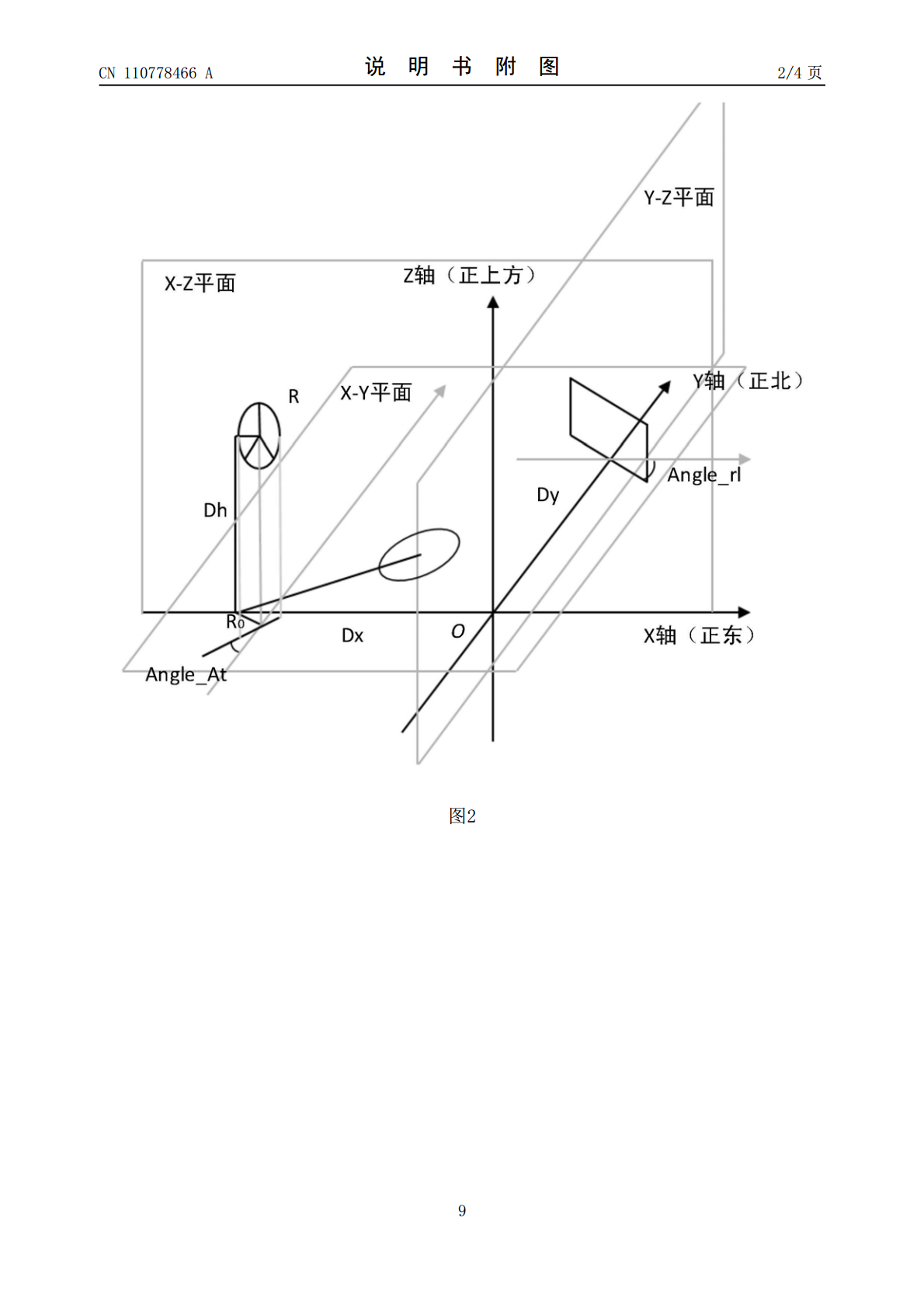
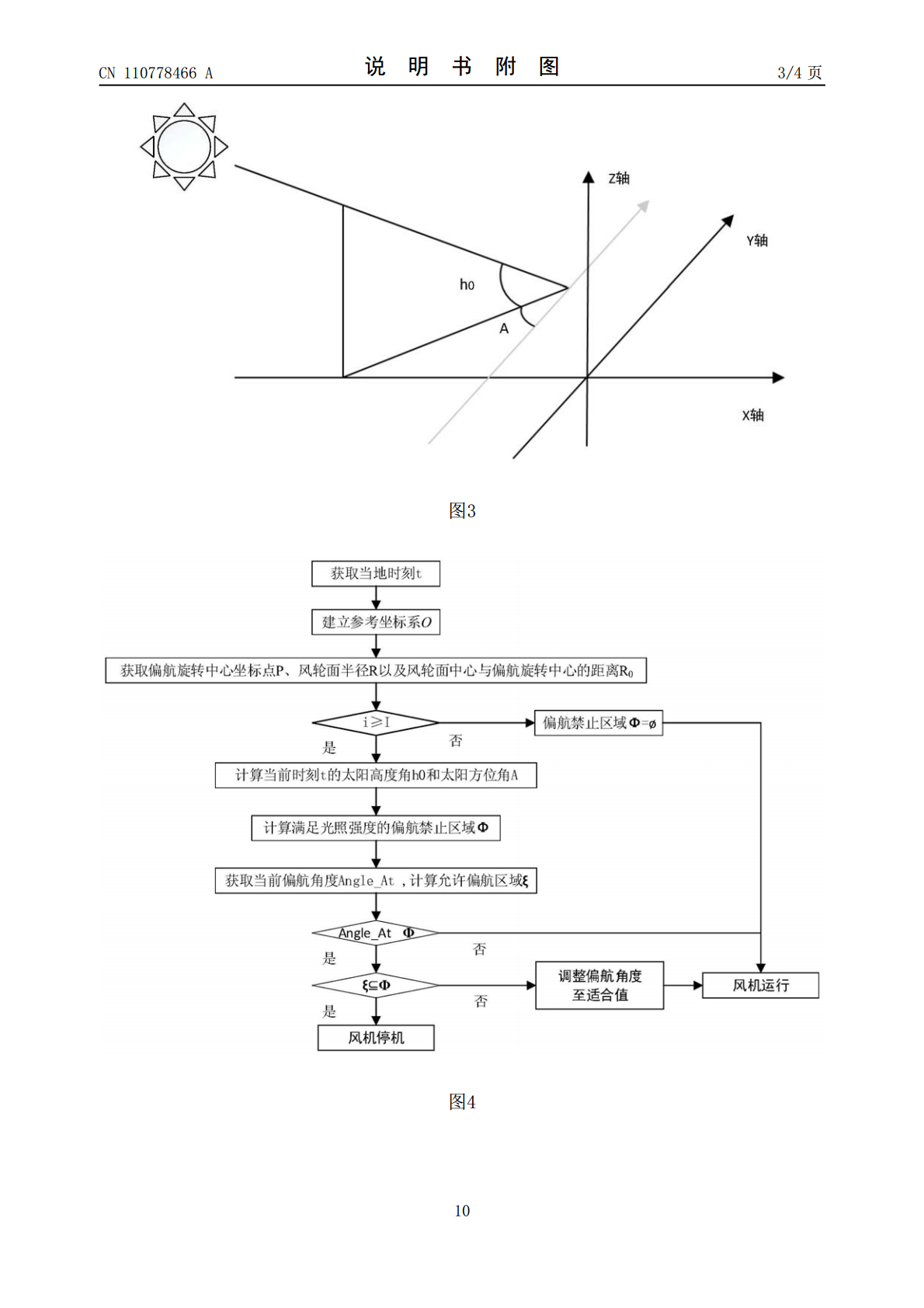
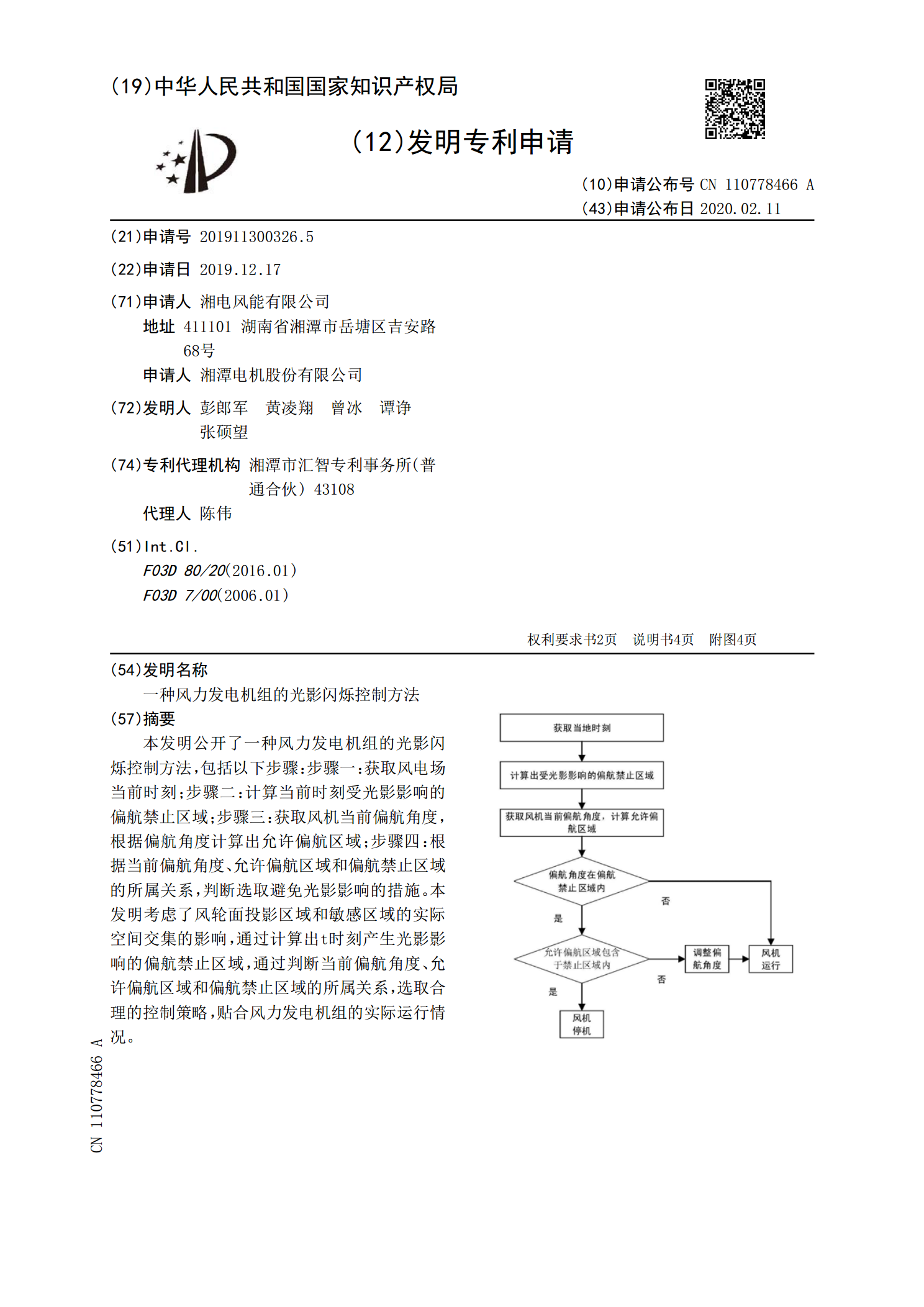
本发明公开了一种风力发电机组的光影闪烁控制方法,包括以下步骤:步骤一:获取风电场当前时刻;步骤二:计算当前时刻受光影影响的偏航禁止区域;步骤三:获取风机当前偏航角度,根据偏航角度计算出允许偏航区域;步骤四:根据当前偏航角度、允许偏航区域和偏航禁止区域的所属关系,判断选取避免光影影响的措施。本发明考虑了风轮面投影区域和敏感区域的实际空间交集的影响,通过计算出t时刻产生光影影响的偏航禁止区域,通过判断当前偏航角度、允许偏航区域和偏航禁止区域的所属关系,选取合理的控制策略,贴合风力发电机组的实际运行情况。
一种风力发电机光影控制方法及其系统.pdf
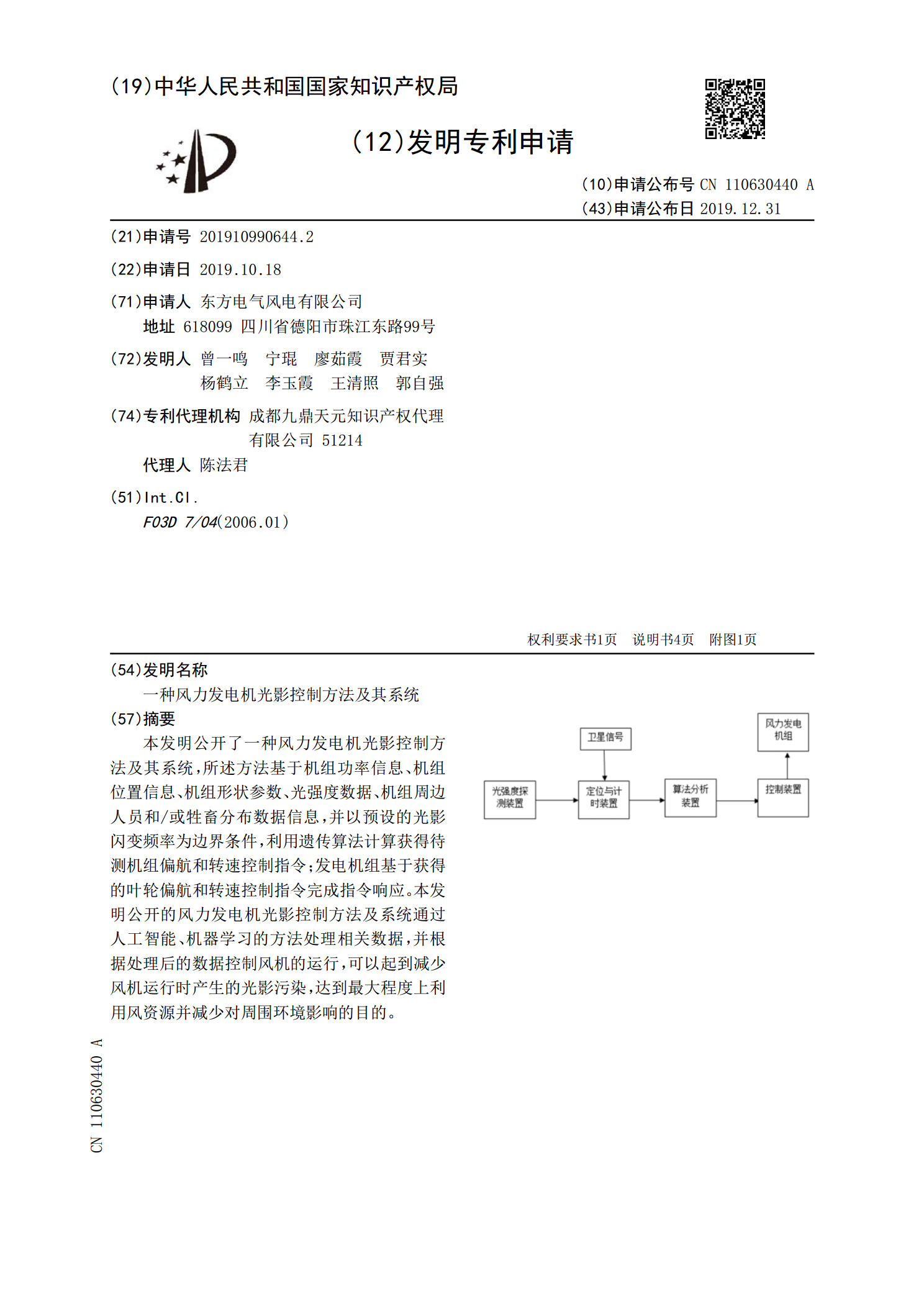
本发明公开了一种风力发电机光影控制方法及其系统,所述方法基于机组功率信息、机组位置信息、机组形状参数、光强度数据、机组周边人员和/或牲畜分布数据信息,并以预设的光影闪变频率为边界条件,利用遗传算法计算获得待测机组偏航和转速控制指令;发电机组基于获得的叶轮偏航和转速控制指令完成指令响应。本发明公开的风力发电机光影控制方法及系统通过人工智能、机器学习的方法处理相关数据,并根据处理后的数据控制风机的运行,可以起到减少风机运行时产生的光影污染,达到最大程度上利用风资源并减少对周围环境影响的目的。

光影闪烁效果.pptx

一种风力发电机组控制方法及系统.pdf
本发明提供了一种风力发电机组控制方法,当风力发电机组处于停机状态时,控制风力发电机组的叶轮以设定转速区间的转速转动。本发明还提供了一种风力发电机组控制系统,其包括控制单元,用于在风力发电机组处于停机状态时,控制叶轮以设定转速区间的转速转动。本发明提供的一种风力发电机组控制方法及系统,可使风力发电机组在低温环境下停机时,控制叶轮保持一定转速,从而产生一定热量使润滑油脂不会因温度过低而润滑性能下降,进而使保证轴承等部件的正常工作,并且提高风力发电机组的轴承使用寿命,降低风力发电机组的故障率。

一种风力发电机组低温启动控制方法.pdf
本发明公开了一种风力发电机组低温启动控制方法,当风速达到切入风速后,机组由于齿轮箱油温低或发电机绕组温度低而不满足启动条件时,机组从待机模式进入冷启动模式,齿轮箱加热器及发电机加热器开启,同时风机桨叶打开一定角度,使风轮以某一速度空转,利用机组的旋转搅动齿轮箱的润滑油和润滑脂,加快润滑油、润滑脂的升温,还可利用润滑油泵加快润滑油的循环,加快润滑油加热,冷启动模式可以根据机组及外部条件自动进入运行模式、停机模式或待机模式。本发明的启动控制方法,可加快机组在低温下的启动速度,启动时间缩短约一半,更好的保护风机