
行星摆线微型RV减速机.pdf

一吃****福乾

1/9
2/9
3/9

4/9
5/9

6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
行星摆线微型RV减速机.pdf
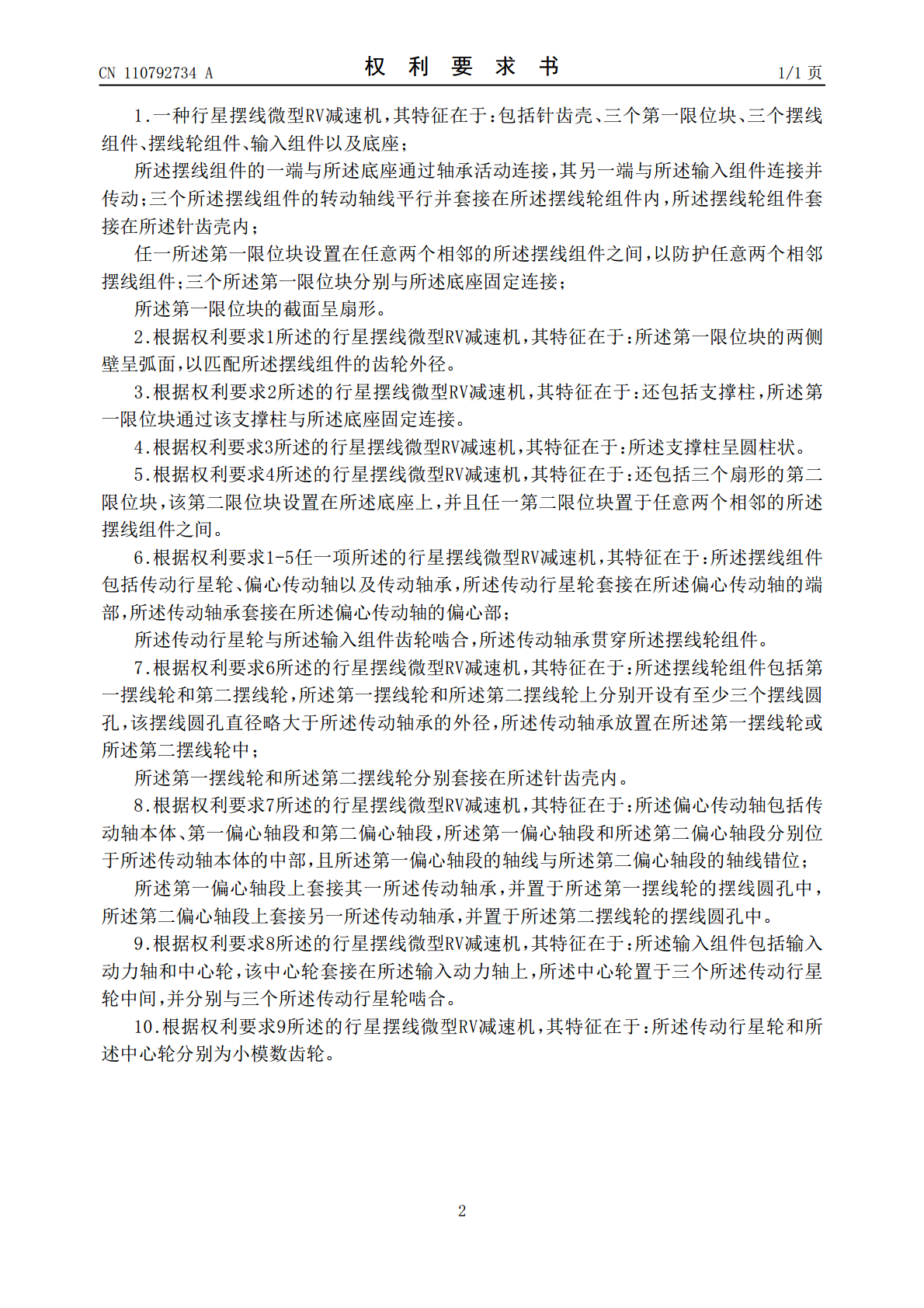
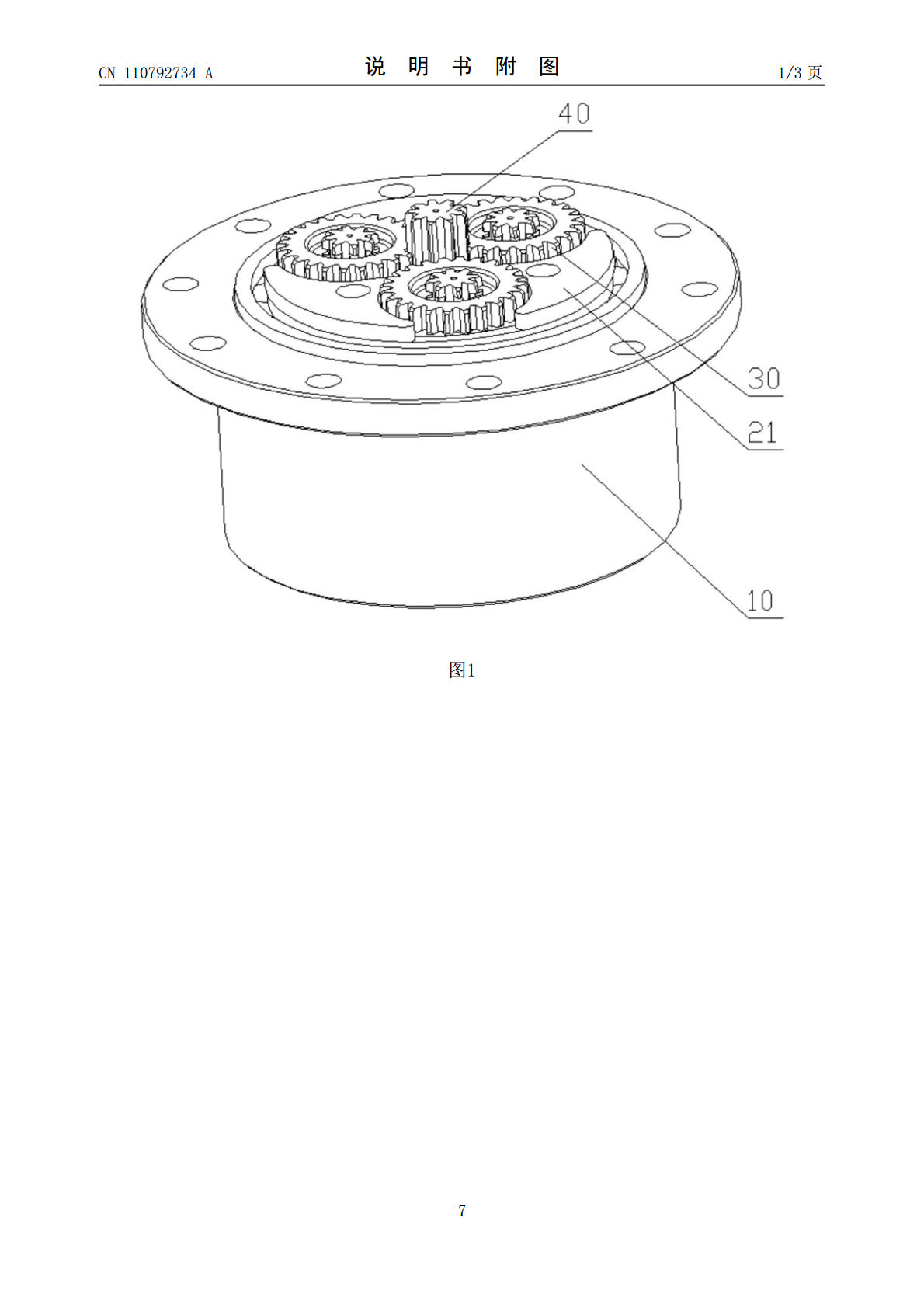
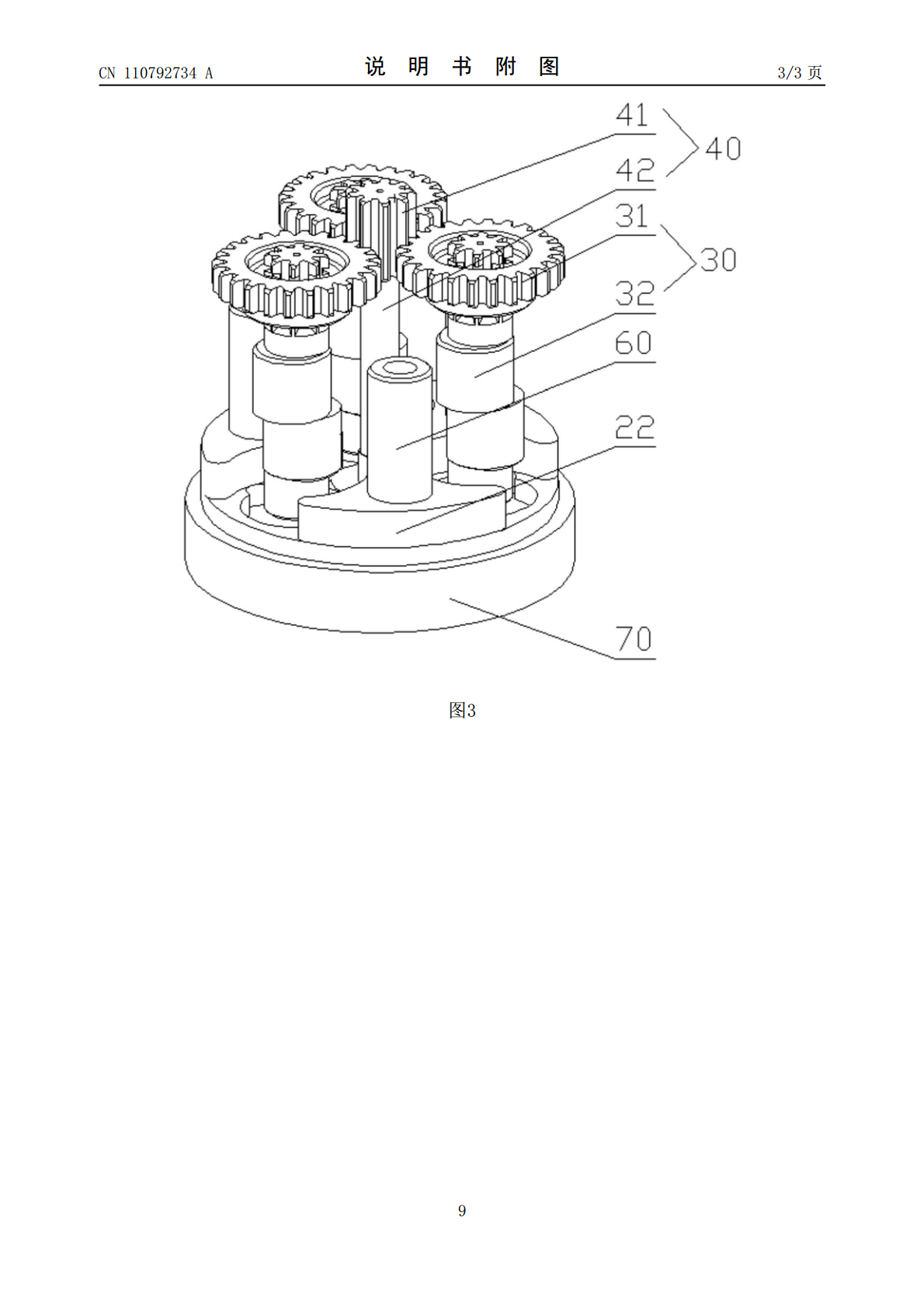
本申请涉及行星摆线微型RV减速机。本申请所述的行星摆线微型RV减速机包括:针齿壳、三个第一限位块、三个摆线组件、摆线轮组件、输入组件以及底座;所述摆线组件的一端与所述底座通过轴承活动连接,其另一端与所述输入组件连接并传动;三个所述摆线组件的转动轴线平行并套接在所述摆线轮组件内,所述摆线轮组件套接在所述针齿壳内;任一所述第一限位块设置在任意两个相邻的所述摆线组件之间,以防护任意两个相邻摆线组件;三个所述第一限位块分别与所述底座固定连接;所述第一限位块的截面呈扇形。本申请所述的行星摆线微型RV减速机具有小型化
RV行星摆线空心减速机.pdf
本发明提出了一种RV行星摆线空心减速机,包括输入轴部,主轴部和偏心轴部,所述输入轴部一端连接电机,另一端通过齿轮啮合与主轴部相接触,所述主轴部通过齿轮啮合与偏心轴部相接触,从而完成减速机各部件的转动,所述输入轴部、主轴部和偏心轴部平行安装于一外壳和盖子组成的空间内部,本发明技术涉及通用的机器人核心部位,属机器人的关键技术部件,主要作用于机器人的关节部位。本发明的结构使减速机的效率提高并减少能耗。

摆线输出的行星摆线减速机.pdf
摆线输出的行星摆线减速机,圆形壳体内的输入轴上有偏心套和平衡块,偏心套上有滚柱轴承,壳体内有输入内齿轮和具有同心的输入外齿轮和输出外齿轮的摆线轮,摆线轮的中心是滚柱的轴承滚道,输入外齿轮与输入内齿轮组成输入少齿差啮合,输出装置有圆形支撑盘,支撑盘一侧的轴线上有输入轴后端的轴承座和同心的输出内齿轮,支撑盘另一侧的轴线上有输出轴,输出轴从后端盖伸出,输出外齿轮与输出内齿轮组成输出少齿差啮合,上述输入少齿差数和输出少齿差数相同,输入内齿轮、输入外齿轮、输出外齿轮和输出内齿轮的模数相同。本发明只有一

摆线行星减速机.pdf
摆线行星减速机,采用摆线轮总成和曲杆组成啮合副、经过二级传动来构成减速功能;传动比范围:39‑199。按其输入轴的位置而分为:‘中实型’和‘中空型’两种;‘中实型’没有中心孔,第一级曲杆(Q
行星摆线减速机.pdf
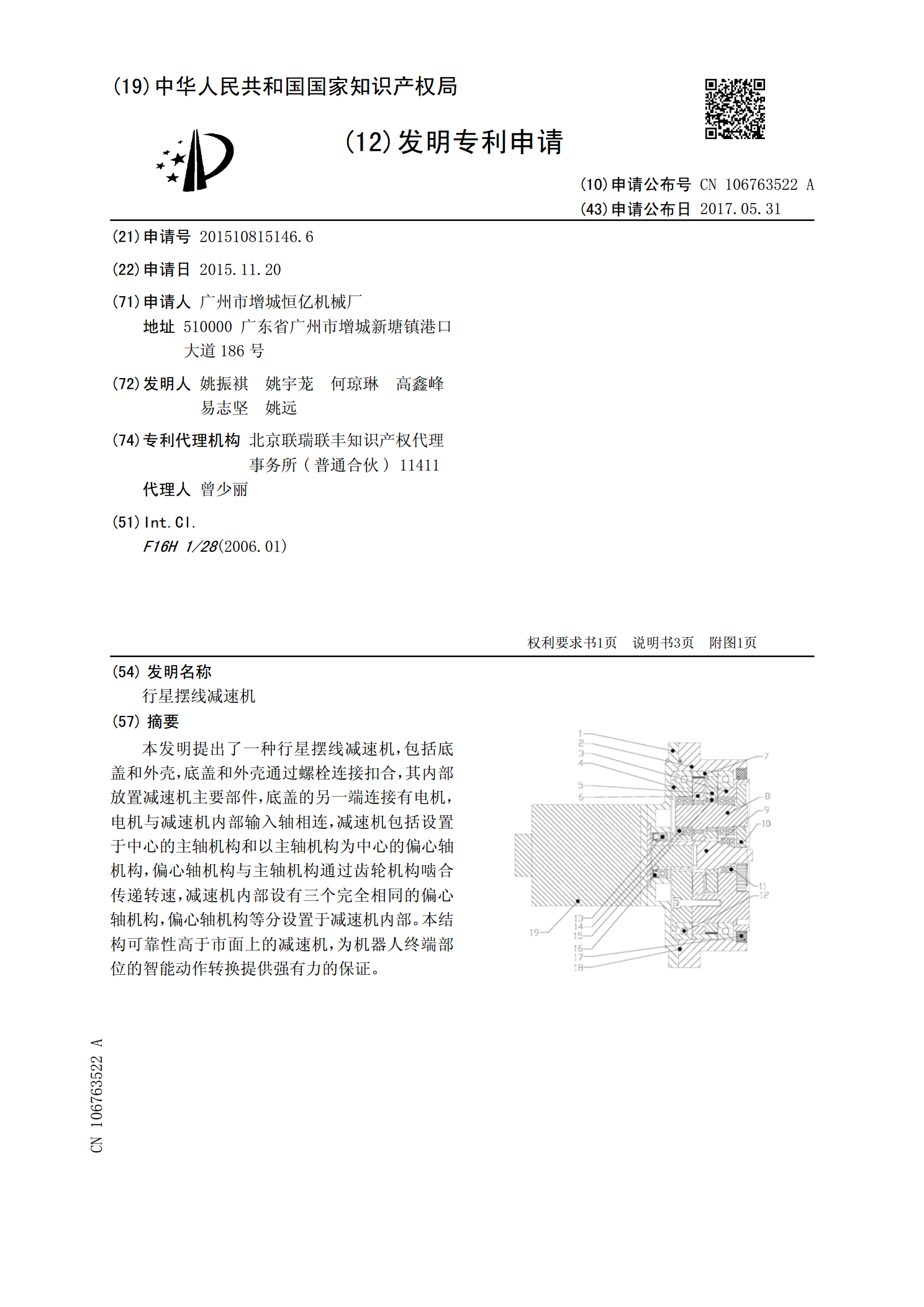
本发明提出了一种行星摆线减速机,包括底盖和外壳,底盖和外壳通过螺栓连接扣合,其内部放置减速机主要部件,底盖的另一端连接有电机,电机与减速机内部输入轴相连,减速机包括设置于中心的主轴机构和以主轴机构为中心的偏心轴机构,偏心轴机构与主轴机构通过齿轮机构啮合传递转速,减速机内部设有三个完全相同的偏心轴机构,偏心轴机构等分设置于减速机内部。本结构可靠性高于市面上的减速机,为机器人终端部位的智能动作转换提供强有力的保证。