
一种变电站瓷瓶带电自动清扫机器人升降装置.pdf

雨巷****碧易


1/9

2/9

3/9
4/9
5/9
6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种变电站瓷瓶带电自动清扫机器人升降装置.pdf
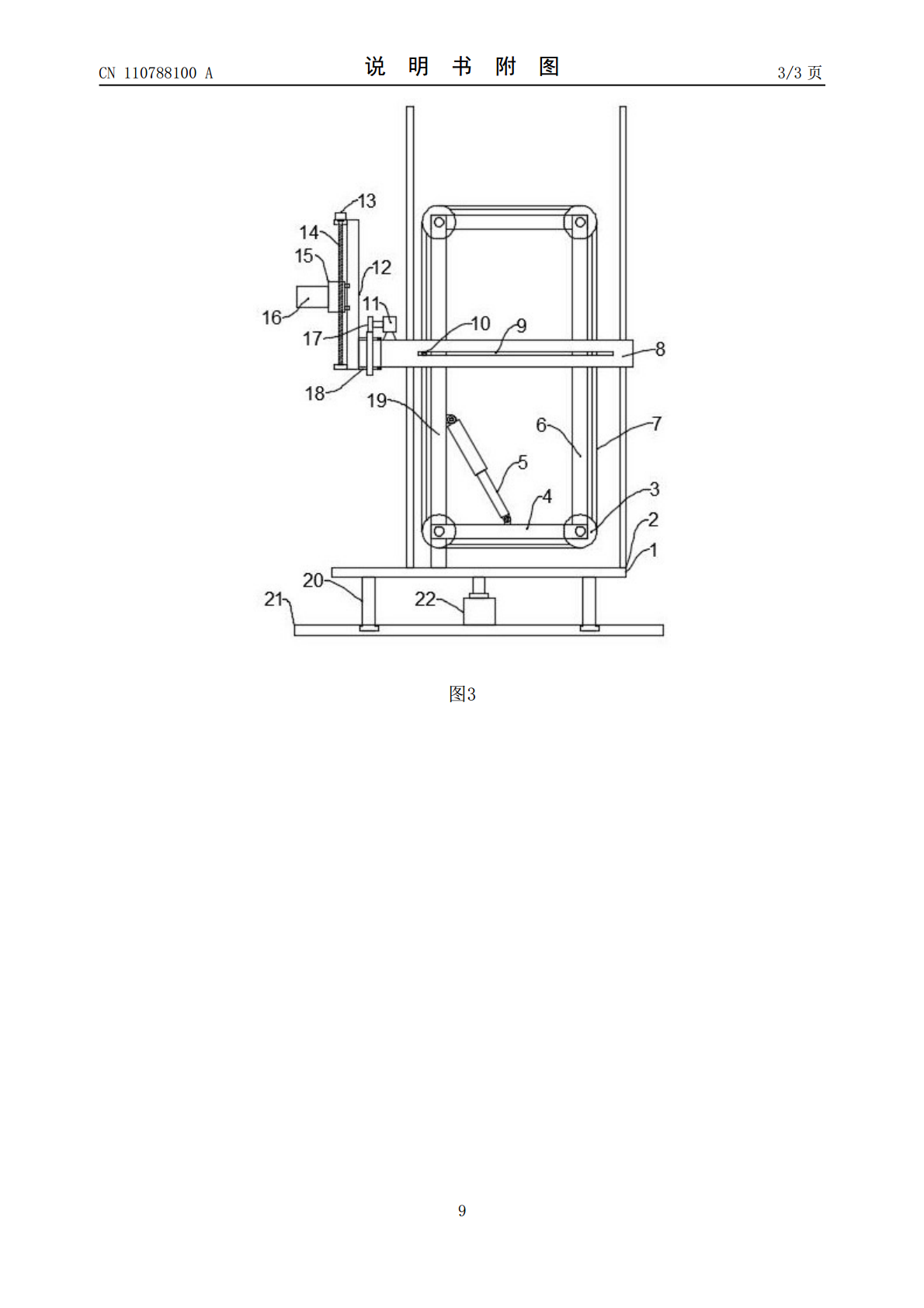
本发明公开了一种变电站瓷瓶带电自动清扫机器人升降装置,包括基板和升降单元,所述升降单元共两组且前后对称安装于基板上,升降单元包括安装架、链传动机构和安装柱,所述安装架包括固定杆、第一连接杆、第二连接杆和液压伸缩杆,所述链传动机构包括链轮和链条,所述清扫机器人本体与安装柱之间连接有调节机构,所述调节机构包括安装套、用于带动安装套转动的动力机构、安装板、第二电机、螺纹杆和活动安装座,本申请设有升降单元,自动带动清扫机器人本体升降往复运动,通过调整平行四边形框架的高度,进一步达到调整清扫机器人本体运动高度的效果
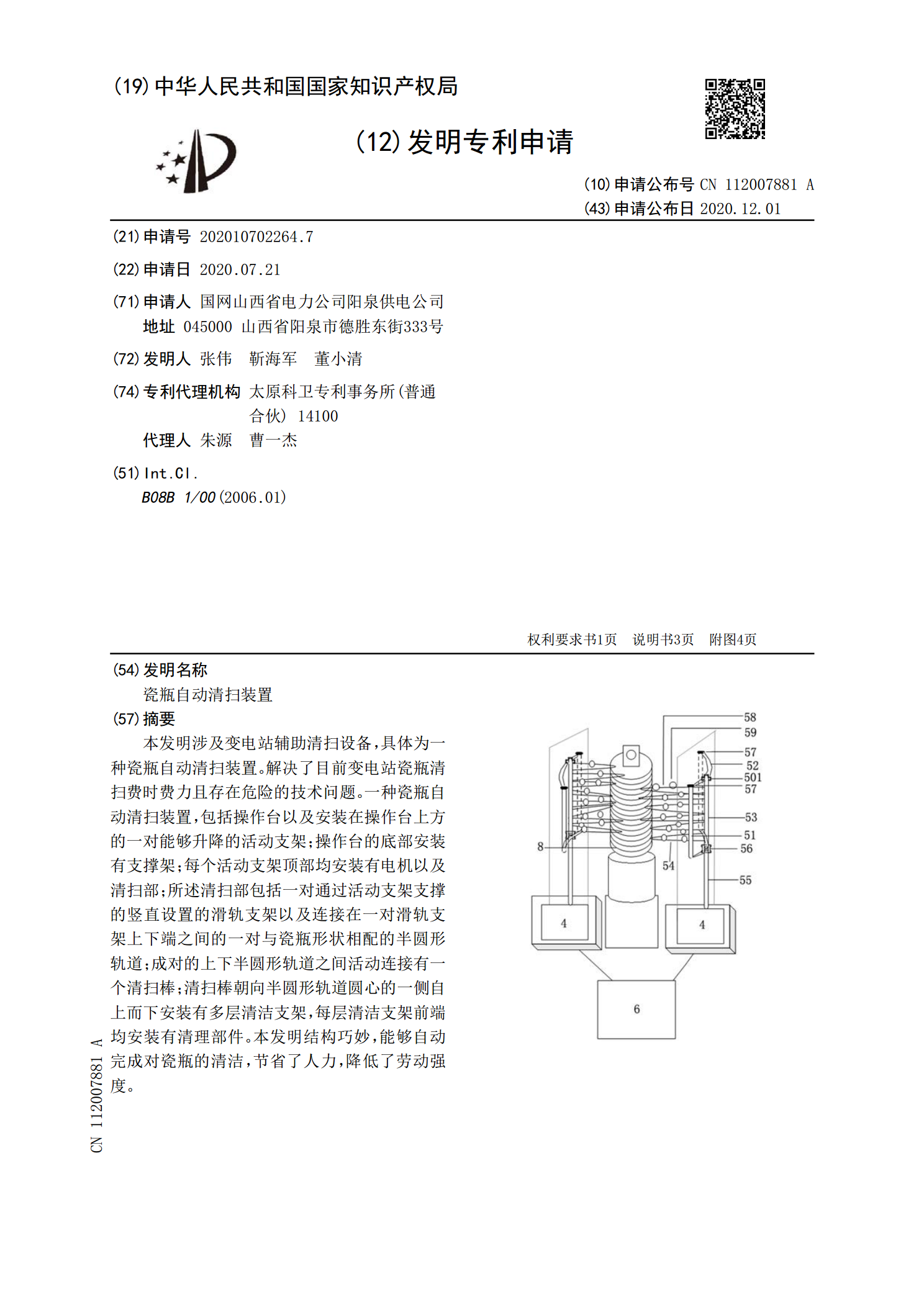
瓷瓶自动清扫装置.pdf
本发明涉及变电站辅助清扫设备,具体为一种瓷瓶自动清扫装置。解决了目前变电站瓷瓶清扫费时费力且存在危险的技术问题。一种瓷瓶自动清扫装置,包括操作台以及安装在操作台上方的一对能够升降的活动支架;操作台的底部安装有支撑架;每个活动支架顶部均安装有电机以及清扫部;所述清扫部包括一对通过活动支架支撑的竖直设置的滑轨支架以及连接在一对滑轨支架上下端之间的一对与瓷瓶形状相配的半圆形轨道;成对的上下半圆形轨道之间活动连接有一个清扫棒;清扫棒朝向半圆形轨道圆心的一侧自上而下安装有多层清洁支架,每层清洁支架前端均安装有清理部
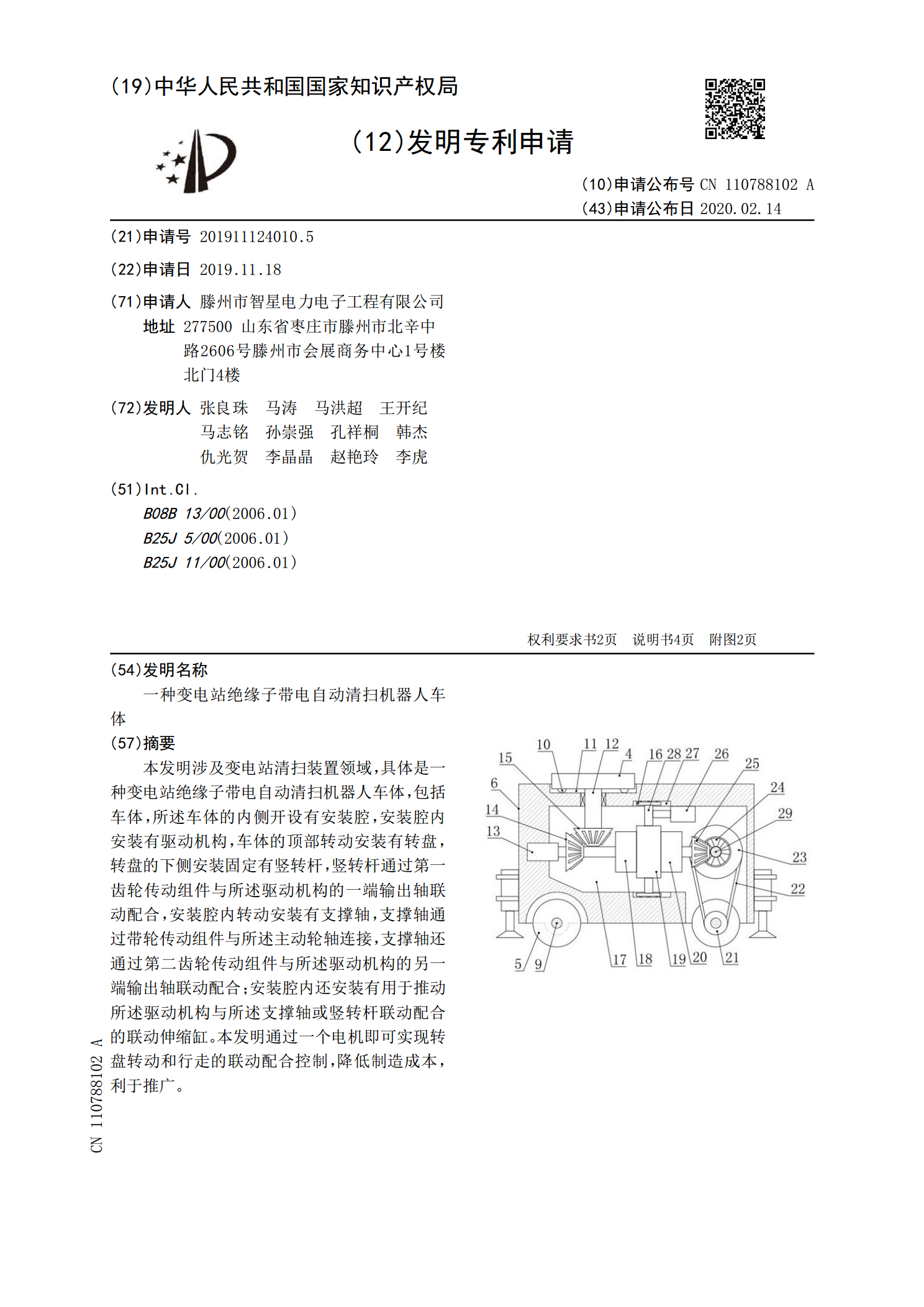
一种变电站绝缘子带电自动清扫机器人车体.pdf
本发明涉及变电站清扫装置领域,具体是一种变电站绝缘子带电自动清扫机器人车体,包括车体,所述车体的内侧开设有安装腔,安装腔内安装有驱动机构,车体的顶部转动安装有转盘,转盘的下侧安装固定有竖转杆,竖转杆通过第一齿轮传动组件与所述驱动机构的一端输出轴联动配合,安装腔内转动安装有支撑轴,支撑轴通过带轮传动组件与所述主动轮轴连接,支撑轴还通过第二齿轮传动组件与所述驱动机构的另一端输出轴联动配合;安装腔内还安装有用于推动所述驱动机构与所述支撑轴或竖转杆联动配合的联动伸缩缸。本发明通过一个电机即可实现转盘转动和行走的联
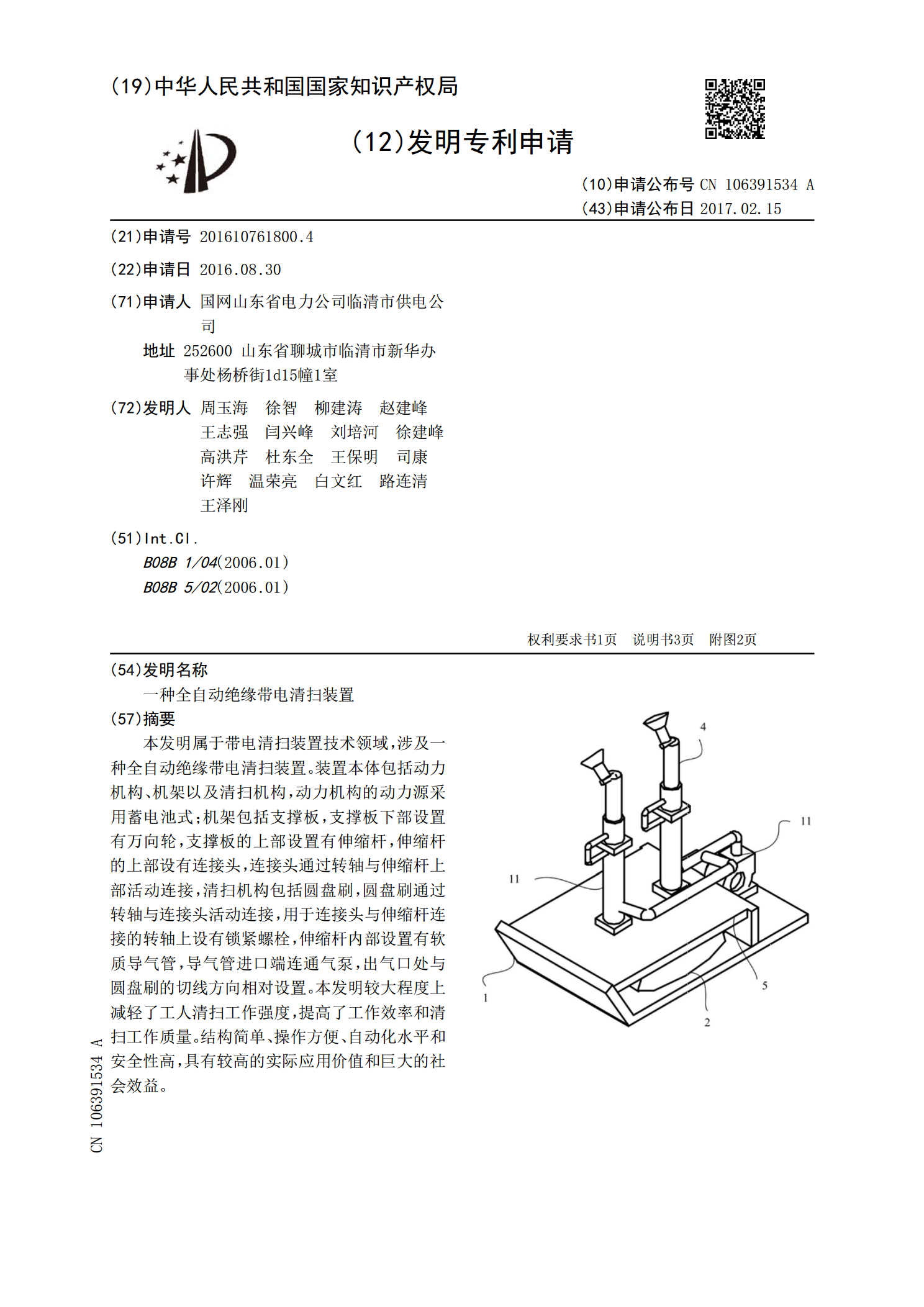
一种全自动绝缘带电清扫装置.pdf
本发明属于带电清扫装置技术领域,涉及一种全自动绝缘带电清扫装置。装置本体包括动力机构、机架以及清扫机构,动力机构的动力源采用蓄电池式;机架包括支撑板,支撑板下部设置有万向轮,支撑板的上部设置有伸缩杆,伸缩杆的上部设有连接头,连接头通过转轴与伸缩杆上部活动连接,清扫机构包括圆盘刷,圆盘刷通过转轴与连接头活动连接,用于连接头与伸缩杆连接的转轴上设有锁紧螺栓,伸缩杆内部设置有软质导气管,导气管进口端连通气泵,出气口处与圆盘刷的切线方向相对设置。本发明较大程度上减轻了工人清扫工作强度,提高了工作效率和清扫工作质量

一种全自动绝缘带电清扫装置.pdf
本发明属于带电清扫装置技术领域,涉及一种全自动绝缘带电清扫装置。装置本体包括动力机构、机架以及清扫机构,动力机构的动力源采用蓄电池式;机架包括支撑板,支撑板下部设置有万向轮,支撑板的上部设置有伸缩杆,伸缩杆的上部设有连接头,连接头通过转轴与伸缩杆上部活动连接,清扫机构包括圆盘刷,圆盘刷通过转轴与连接头活动连接,用于连接头与伸缩杆连接的转轴上设有锁紧螺栓,伸缩杆内部设置有软质导气管,导气管进口端连通气泵,出气口处与圆盘刷的切线方向相对设置。本发明较大程度上减轻了工人清扫工作强度,提高了工作效率和清扫工作质量