
一种可调式柔性翻边成形机构.pdf

一只****懿呀

1/8
2/8
3/8
4/8
5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可调式柔性翻边成形机构.pdf
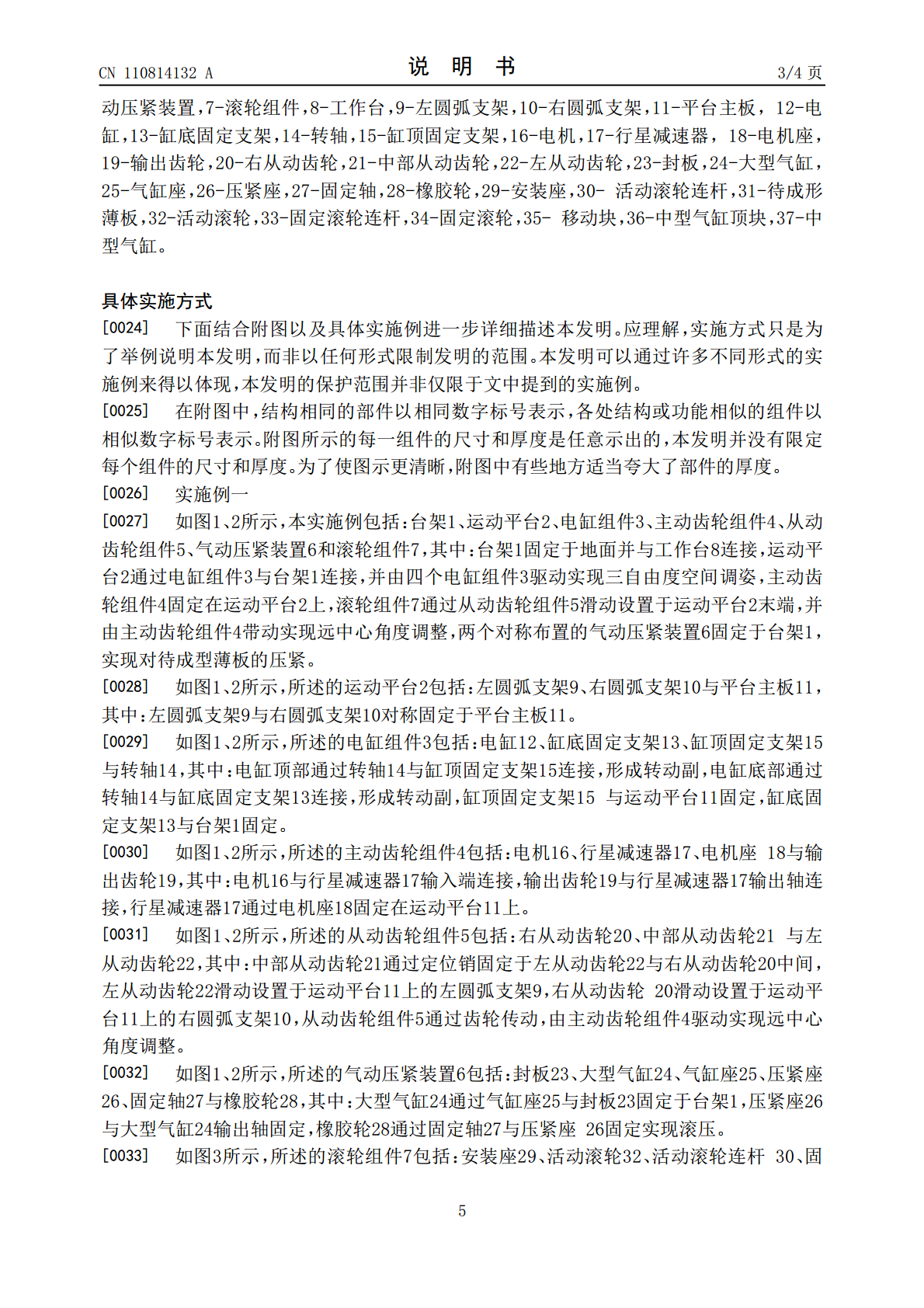
本发明公开了一种可调式柔性翻边成形机构,涉及板料钣金塑性加工技术领域,包括台架、运动平台、电缸组件、主动齿轮组件、从动齿轮组件、滚轮组件和气动压紧装置;所述台架固定于地面并与所述工作台连接,所述运动平台通过所述电缸组件与所述台架连接,由所述电缸组件驱动实现三自由度空间调姿,所述主动齿轮组件固定在所述运动平台上,所述滚轮组件通过所述从动齿轮组件滑动设置于所述运动平台末端,并由所述主动齿轮组件带动实现远中心角度调整,两个对称布置的所述气动压紧装置固定于所述台架,实现对待成型薄板的压紧。本发明在翻边过程中只需要
可转工作台的柔性翻边成形装置.pdf
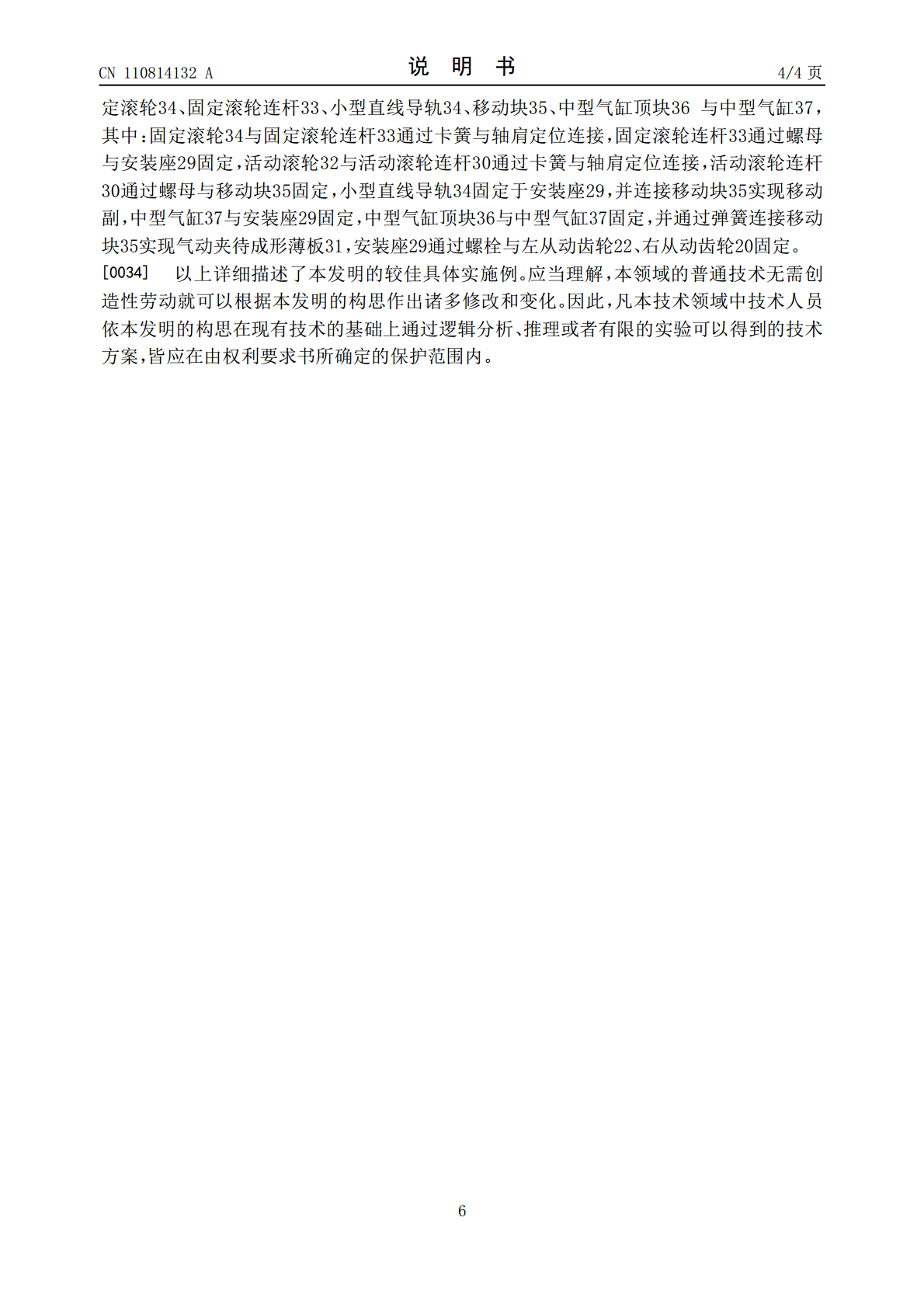
一种可转工作台的柔性翻边成形装置,包括:机器人滚压机构以及相对设置的活动胎模机构,其中:待成形薄板固定设置于活动胎模机构上,通过机器人滚压机构以预设路径进行滚压翻边。本装置通过机器人操纵滚轮对板料局部进行多道次滚压,逐步变形获得最终翻边零件,能够提供足够的力改善翻边件贴模的问题,本发明噪音小,零件成形质量稳定。
基于机器人的柔性渐进翻边成形方法.pdf
一种基于机器人的柔性渐进翻边成形方法,在工艺规划阶段,设置工具头首先沿Z轴运动至运动起始点,然后绕Z轴进行多道次翻边成形,计算得到每道次翻边角度和工具头每道次沿径向前进距离,并根据测量得到的目标翻边件的翻边开角、圆弧开角、待处理板料的板料平面部分外径、过渡部分圆角半径以及翻边部分长度计算得到每道次工具头初始坐标,再将初始坐标以及与板料接触点的弯曲半径计算得到任意道次任意时刻工具头的位置坐标;在执行阶段,通过工业六轴机器人控制位姿的工具头以规划得到的位置坐标进行翻边件快速精确成形。本发明能够有效地解决了钣金

多道次机器人柔性翻边全模成形方法.pdf
一种多道次机器人柔性翻边全模成形方法,在工艺规划阶段,以待成形板料下平面为基准面,板料圆心为原点,建立三维直角坐标系,设置滚轮首先沿X轴运动至运动起始点,然后绕Y轴根据目标翻边件的翻边开角,设置多道次翻边成形;根据原始板料内径、圆弧开角以及厚度、目标翻边件的翻边开角、过渡圆角半径、待成形板料的压紧部分的长度、翻边部分长度、滚轮半径、滚轮底面到滚轮与板料成形时的理论切点距离;以及模具平面的Y轴坐标计算得到每道次滚轮初始坐标;在执行阶段,通过工业六轴机器人控制滚轮达到每道次滚轮初始坐标并对板料待翻边部分施加成

一种翻边机构.pdf
本发明实施例提供了一种翻边机构,所述翻边机构包括驱动装置和翻边装置,其中所述翻边装置进一步包括第一底座,设置在所述第一底座上的垫板、连接在所述第一底座上方的空心回转架;所述回转架上还设置有滚轮和第一轴,所述第一轴穿过所述滚轮的中心孔后可旋转地连接在所述回转架上;所述回转架下部设置有第二轴,当所述翻边装置处于工作状态时,所述回转架可绕所述第二轴转动;所述回转架内部设置有两个垂直方向的通孔,每个通孔内分别设置有一根弹簧,所述弹簧上端连接在用于堵住所述通孔上方的螺母,下端连接在导向柱的底部。本发明实施例提供的翻