
一种基于图像识别的园林修剪机器人.pdf

是你****晨呀

1/8

2/8
3/8
4/8
5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于图像识别的园林修剪机器人.pdf
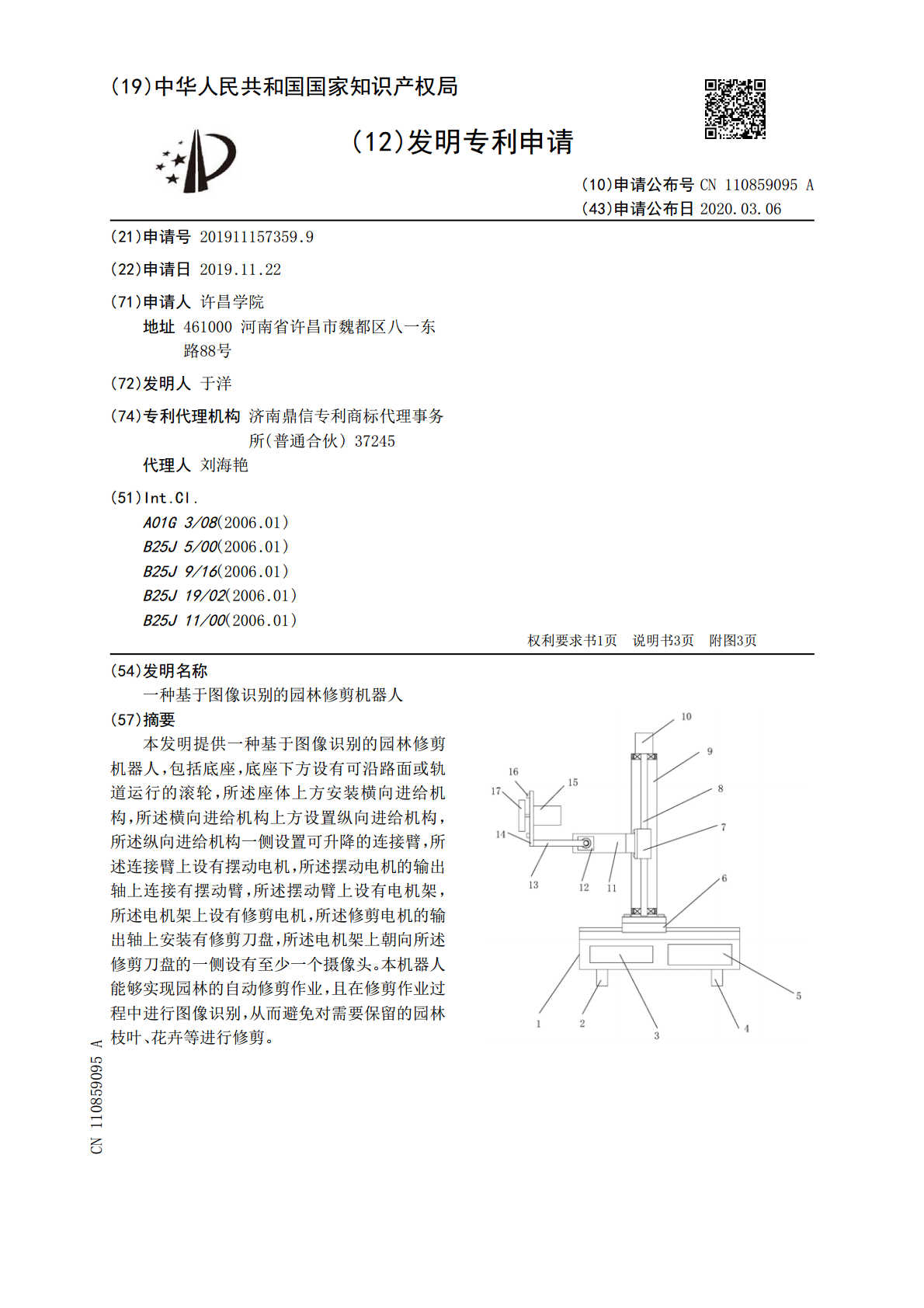
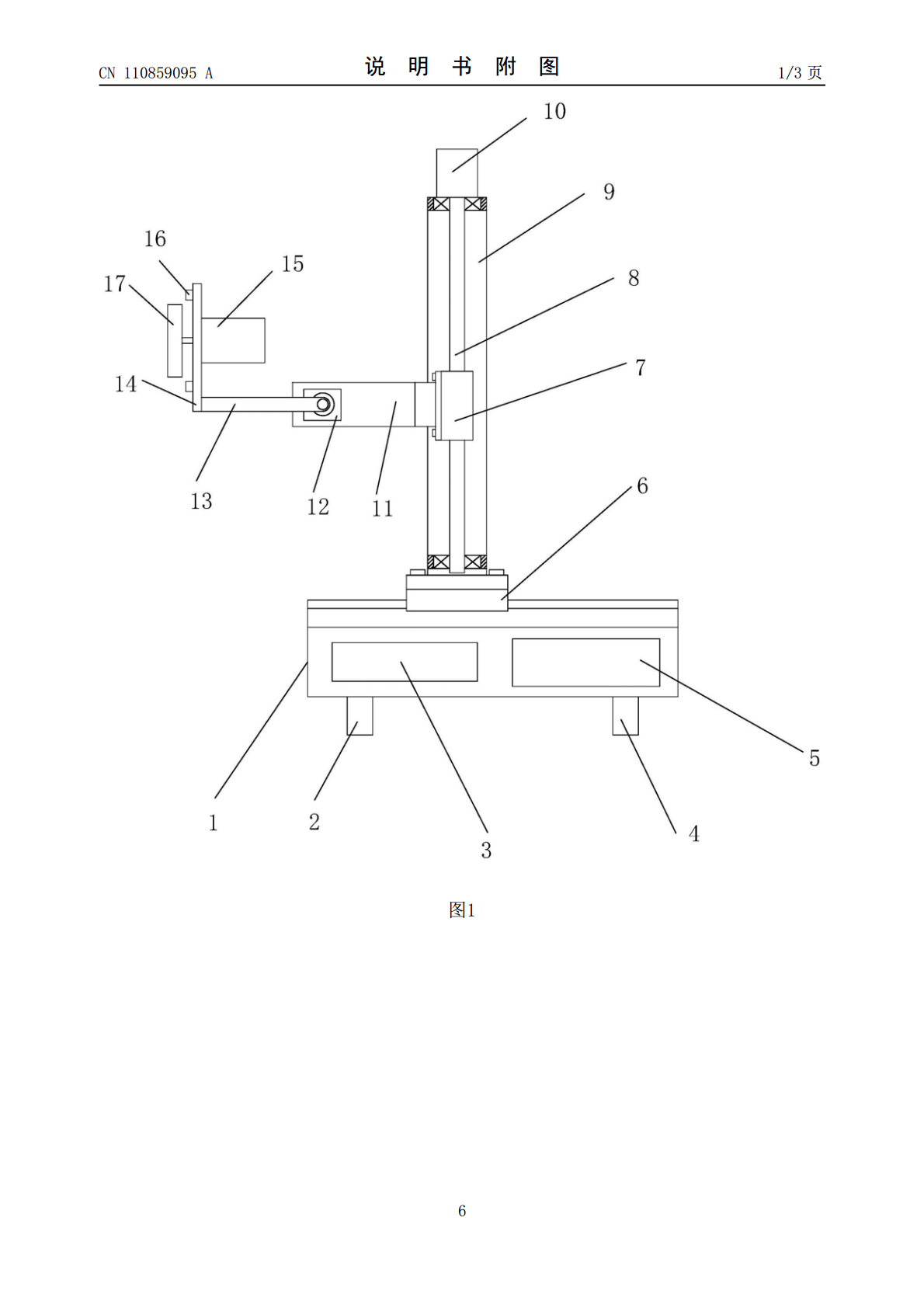
本发明提供一种基于图像识别的园林修剪机器人,包括底座,底座下方设有可沿路面或轨道运行的滚轮,所述座体上方安装横向进给机构,所述横向进给机构上方设置纵向进给机构,所述纵向进给机构一侧设置可升降的连接臂,所述连接臂上设有摆动电机,所述摆动电机的输出轴上连接有摆动臂,所述摆动臂上设有电机架,所述电机架上设有修剪电机,所述修剪电机的输出轴上安装有修剪刀盘,所述电机架上朝向所述修剪刀盘的一侧设有至少一个摄像头。本机器人能够实现园林的自动修剪作业,且在修剪作业过程中进行图像识别,从而避免对需要保留的园林枝叶、花卉等进

一种园林修剪机器人.pdf
本申请公开了一种园林修剪机器人,包括机器人本体,所述机器人本体前端设置有机械臂转向基座,所述机械臂转向基座上设置有若干节相互连接的机械臂,所述机械臂与机械臂之间通过可做360度旋转运动的活动关节连接,所述若干节相互连接的机械臂其末端机械臂连接有机械臂转向基座,其首端机械臂与修剪轮连接,所述修剪轮上设置有修剪轮驱动电机,以传统人工修剪园林为基础,设计了可移动和可转向的方式,并且有机械臂组可旋转,升降能够自由调整高度以适应不同高度的园林修剪需求,可以实现复杂环境下园林中灌木的修剪。

一种园林修剪机器人.pdf
本发明公开了一种园林修剪机器人,包括机器人本体和刀盘,所述机器人本体顶部通过固定螺栓连接有旋转平台,所述旋转平台顶部设有固定柱,所述固定柱通过第二转轴和第一折臂转动连接。本发明中,景观园林树木的修剪需要一个灵活多变的机械设备,这样才能使人的双手从劳动中解放出来,该设备的底座采用三百六十度自由旋转的旋转平台,第一折臂和第二折臂能够自由伸缩到不同的高度,这样就能够根据需要修剪的园林树木的形状进行快速高效的修剪,而且电动机带动的从动齿轮上安装有内向弯曲的刀盘,可以使靠近刀盘的树枝准确被切割掉,避免了反复多次进行

一种高智能新型园林修剪机器人.pdf
本发明提供一种高智能新型园林修剪机器人,包括圆形导轨平台以及设置于该所述圆形导轨平台下部的至少四个支撑柱;在各支撑柱下部设置有滚轮;且在所述支撑柱内部设置有与滚轮相连接、用于调节设备整体高度的高度调节机构;该高度调节机构包括与滚轮相连接的连接杆以及用于驱动连接杆上下移动的驱动气缸;还包括与驱动气缸电性连接的控制器;圆形导轨平台上部设置有可沿着该圆形导轨平台移动的至少一个修剪机器人主机体;实际使用过程中,修剪机器人主机体可以在圆形导轨平台上任意移动,进行修剪动作,结构设计合理,使用效果好,本设计智能化程度高

园林植物修剪机器人.pdf
园林植物修剪机器人,是由支撑架、环形导轨、内齿轮、底座固定滑块、底盘外齿轮、齿轮连接轴、底座、水平旋转座、运动杆臂、调整杆臂、修剪电机、旋刀固定机构、旋刀夹持机构、旋刀组成的,环形导轨内外圈分别固定在支撑架上,内齿轮焊接在支撑架内侧,底盘外齿轮由齿轮连接轴与底座连接,底座固定滑块在环形导轨上,底座在底座固定滑块上方固定,水平旋转座在底座上方,运动杆臂连接在水平旋转座上,运动杆臂与调整杆臂连接一起,修剪电机在调整杆臂末端槽内,旋刀在旋刀夹持机构上,旋刀夹持机构由旋刀固定机构固定在调整杆臂末端。