
一种无动力货架及货物运输装置.pdf

雨巷****碧易


1/10
2/10
3/10

4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无动力货架及货物运输装置.pdf
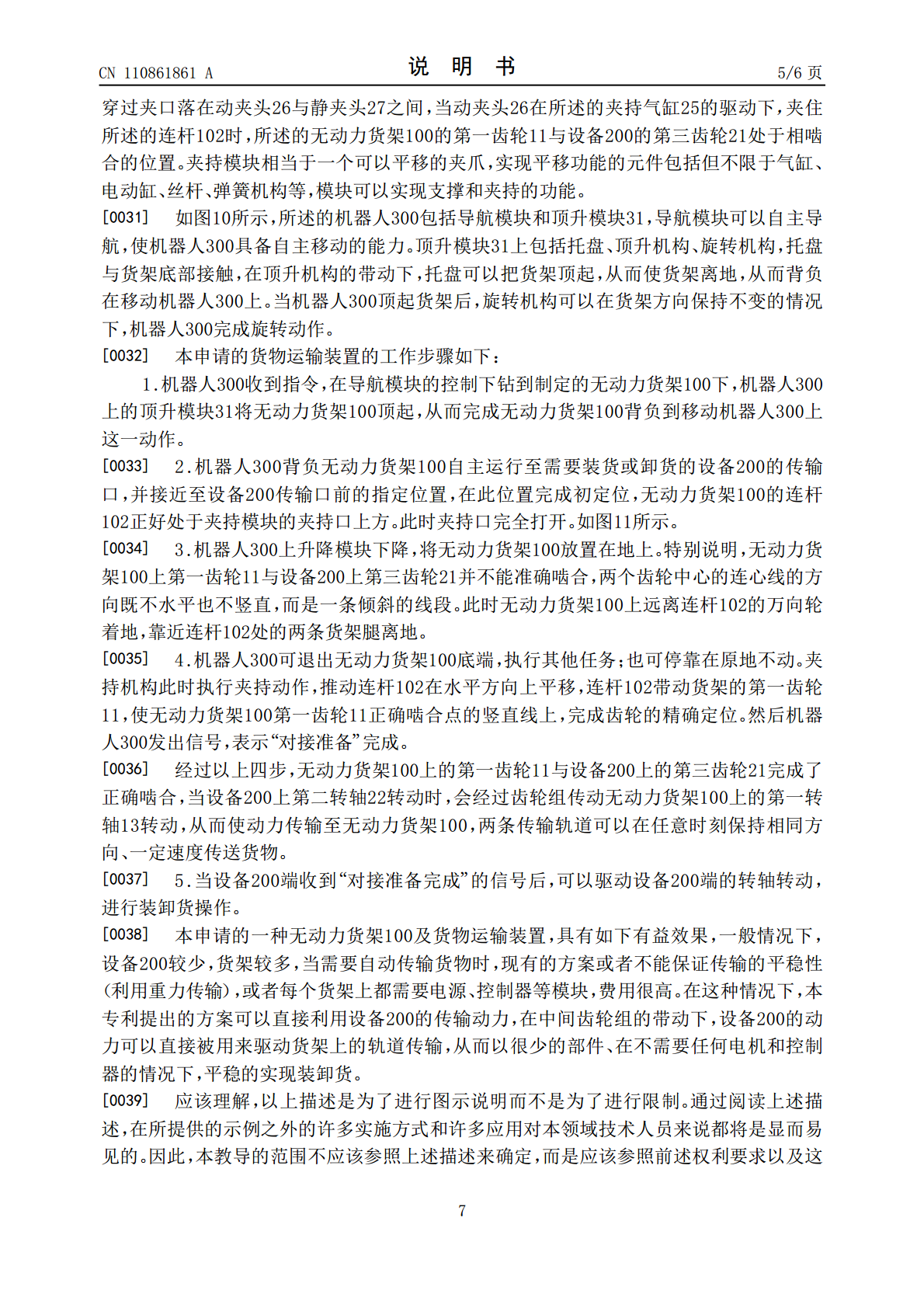
本申请提供了一种无动力货架及货物运输装置,所述的无动力货架能够与设备对接,所述的设备包括用于传送货物的第二传送轨道、在第二传送轨道的带动下能够同步转动的第三齿轮,所述的无动力货架包括货架本体、安装在所述的货架本体上的能够与设备的第二传送轨道相对接的第一传送轨道、在转动时能够带动所述的第一传送轨道运行的第一齿轮,当第一传送轨道与第二传送轨道相对接时,所述的第一齿轮能够与第三齿轮相啮合。本申请的无动力货架及货物运输装置直接借用设备的动力带动货架上的传输轨道,从而完成装卸货。
一种无动力货架及货物运输装置.pdf
本申请提供了一种无动力货架及货物运输装置,所述的无动力货架能够与设备对接,所述的设备包括用于传送货物的第二传送轨道、在第二传送轨道的带动下能够同步转动的第三齿轮,所述的无动力货架包括货架本体、安装在所述的货架本体上的能够与设备的第二传送轨道相对接的第一传送轨道、在转动时能够带动所述的第一传送轨道运行的第一齿轮,当第一传送轨道与第二传送轨道相对接时,所述的第一齿轮能够与第三齿轮相啮合。本申请的无动力货架及货物运输装置直接借用设备的动力带动货架上的传输轨道,从而完成装卸货。

一种便于查找货物的货架.pdf
本发明公开了一种便于查找货物的货架,包括架体,所述架体的中部设置有n个横板,n个所述横板将所述架体分隔成n+1个储物空间,所述储物空间的外侧铰接安装有若干个格挡门,相邻所述格挡门之间安装有隔板,所述格挡门的两侧均安装有连接组件,所述隔挡门上开设有进料口,所述进料口处安装有识别模块,所述储物空间内活动安装有置物盘,所述置物盘的一侧安装有推动组件,所述架体的一侧安装有控制器、存储模块与输入模块,所述识别模块、所述推动组件、所述存储模块与所述输入模块均与所述控制器电连接,本发明能够快速查找到货物的位置,实现货物

综合商店货架运输装置.pdf
综合商店货架运输装置。在运输货架的时候常常繁琐、成本较高,在运输的过程中,由于运输环境复杂,常常需要进行方向转变,方向转变困难,操作不便。本发明组成包括:主轨道(1),所述的主轨道包括推车移动时用的推车轨道以及货架移动时的货架轨道(2),所述的推车轨道铺设在地面开挖的槽(3)内,所述槽的深度满足推车在推车轨道时,推车(4)的上表面与地面齐平;转向盘设在主轨道转弯处,转向盘包括一个可沿设在圆心的转轴转动的圆盘;升降台底部由升降机驱动,台面上设有与主轨道匹配的第二副轨;所述的推车包括设有车载轨道的车板以及与推
一种货物运输装置.pdf
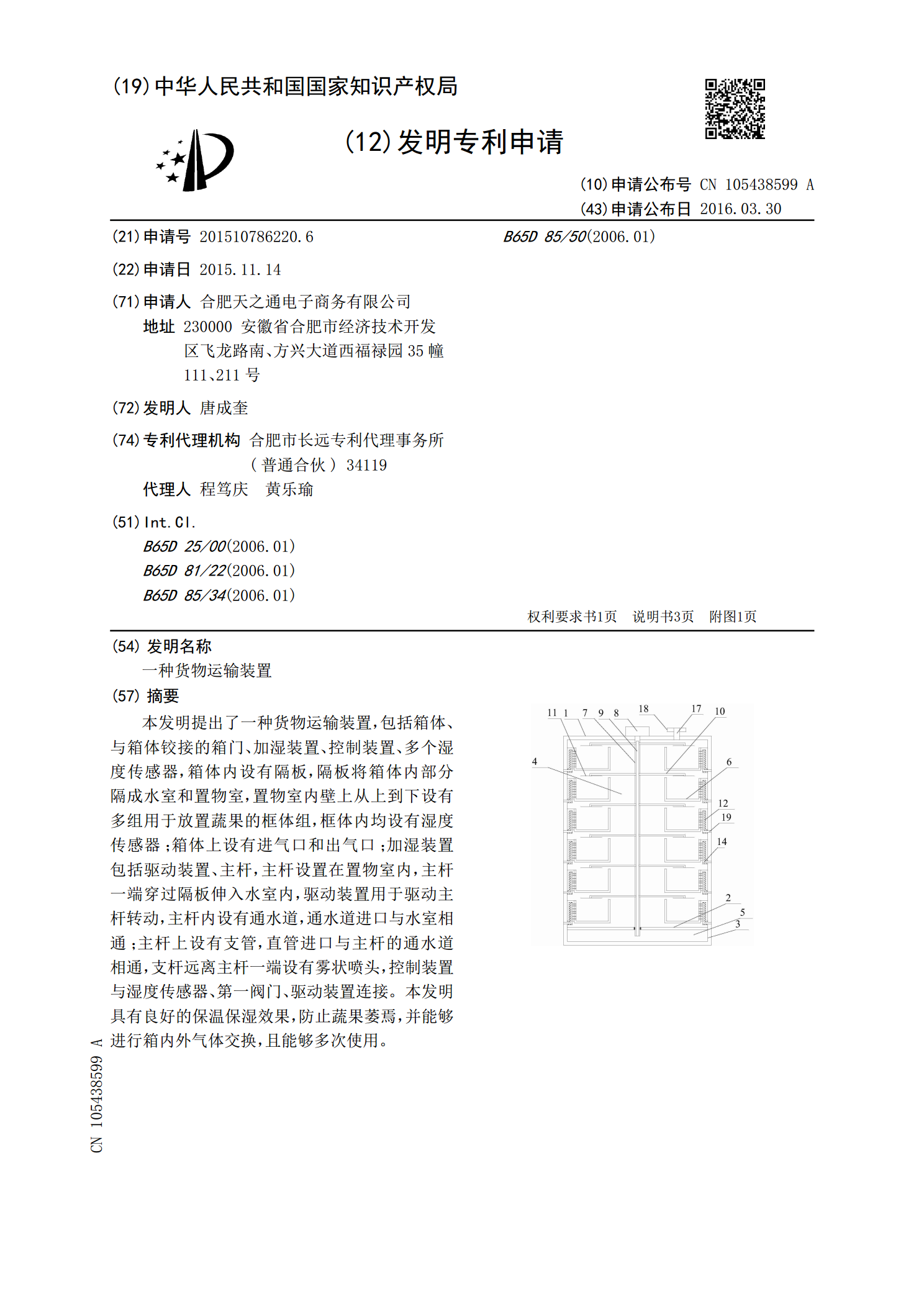
本发明提出了一种货物运输装置,包括箱体、与箱体铰接的箱门、加湿装置、控制装置、多个湿度传感器,箱体内设有隔板,隔板将箱体内部分隔成水室和置物室,置物室内壁上从上到下设有多组用于放置蔬果的框体组,框体内均设有湿度传感器;箱体上设有进气口和出气口;加湿装置包括驱动装置、主杆,主杆设置在置物室内,主杆一端穿过隔板伸入水室内,驱动装置用于驱动主杆转动,主杆内设有通水道,通水道进口与水室相通;主杆上设有支管,直管进口与主杆的通水道相通,支杆远离主杆一端设有雾状喷头,控制装置与湿度传感器、第一阀门、驱动装置连接。本发