
一种PID控制器参数智能优化方法.pdf

康佳****文库

1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种PID控制器参数智能优化方法.pdf
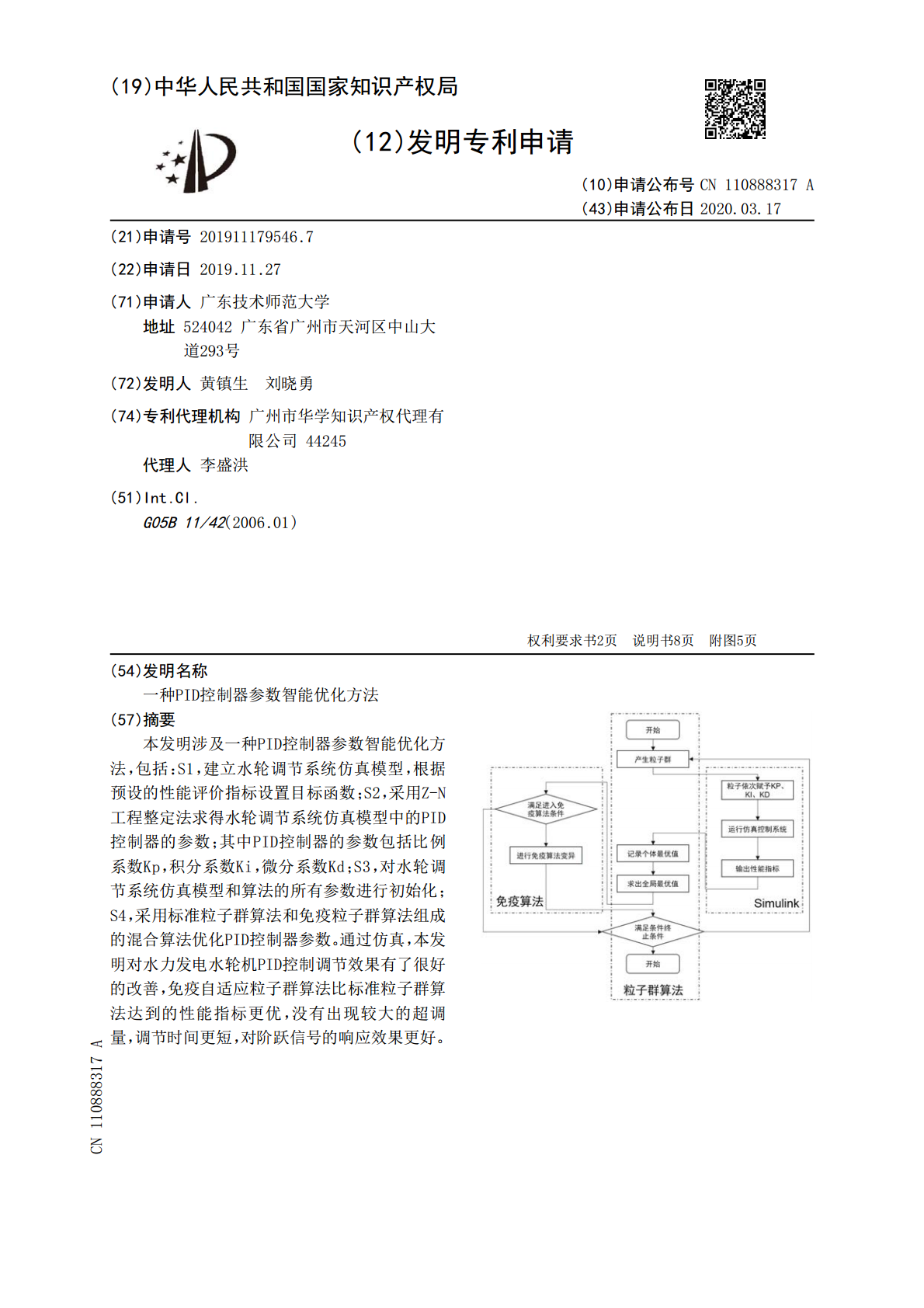
本发明涉及一种PID控制器参数智能优化方法,包括:S1,建立水轮调节系统仿真模型,根据预设的性能评价指标设置目标函数;S2,采用Z‑N工程整定法求得水轮调节系统仿真模型中的PID控制器的参数;其中PID控制器的参数包括比例系数Kp,积分系数Ki,微分系数Kd;S3,对水轮调节系统仿真模型和算法的所有参数进行初始化;S4,采用标准粒子群算法和免疫粒子群算法组成的混合算法优化PID控制器参数。通过仿真,本发明对水力发电水轮机PID控制调节效果有了很好的改善,免疫自适应粒子群算法比标准粒子群算法达到的性能指标更

一种PID参数的优化方法及PID参数的优化装置.pdf
本申请涉及一种PID参数的优化方法及PID参数的优化装置,属于机器人控制器领域。本申请对机械臂运动质量进行评估;通过神经网络对机械臂运动质量的评估进行学习,并得到回归模型;采用贪婪算法从所述回归模型中获取PID参数,以提供给控制器控制机械臂运行。通过贪婪算法可实现从回归模型不断进行采样,直至得到最优PID参数,以提供给控制器执行,能有效解决控制器PID参数的自动优化的问题,进而实现对控制器PID参数优化的方面改进。

一种PID控制器参数优化方法、装置、设备、存储介质.pdf
本申请公开了一种PID控制器参数优化方法、装置、设备、存储介质,涉及工业控制技术领域,包括:获取包含操作变量和被控变量的控制回路和控制回路的开环模型特征;获取用于表征被控变量的动态的自定义闭环动态序列数据;基于开环模型特征和自定义闭环动态序列数据构建PID控制器的参数优化函数;利用待优化PID控制器参数构建的约束条件对参数优化函数进行优化求解,确定PID控制器的优化参数。由于获取了自定义闭环动态序列数据,并构建PID控制器的参数优化函数,使通过对参数优化函数进行优化求解,确定优化参数的方式,能够直观地设计

基于混合计算智能的分数阶PID控制器参数优化.docx
基于混合计算智能的分数阶PID控制器参数优化摘要:随着工业领域的发展与需求的提高,PID控制器被广泛应用于各种控制系统中。然而,传统PID控制器的性能往往受其固有缺陷所限制,很难适应复杂的工业应用环境。为了克服这些缺点,本文提出了一种基于混合计算智能的分数阶PID控制器参数优化方法。该方法将模糊PID控制器、遗传算法和人工神经网络相结合,通过优化PID控制器的参数以实现系统的最优控制。实验结果表明,本文提出的混合计算智能控制器具有更快的响应速度、更高的控制精度和更好的稳定性。关键词:混合计算智能;分数阶P

PID控制器参数智能整定方法研究综述报告.docx
PID控制器参数智能整定方法研究综述报告摘要:PID控制器是工业控制中应用最广泛的控制器。PID控制器参数的合理设置对于控制系统的性能具有重要的影响。传统的PID控制器参数整定通常依靠经验或试错法,难以保证最优参数的设置。因此,智能化PID控制器参数整定引起了研究者的广泛关注。本文综述了近年来智能化PID控制器参数整定方法的研究现状和主要研究方向,包括基于遗传算法、模糊逻辑、人工神经网络、粒子群算法等智能算法的PID控制器参数整定方法,并分析了各种方法的特点及适用范围,为工程实践提供了一定的参考价值。关键