
一种基于履带式六轴机器人的智能拧紧装配系统.pdf

子璇****君淑

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于履带式六轴机器人的智能拧紧装配系统.pdf
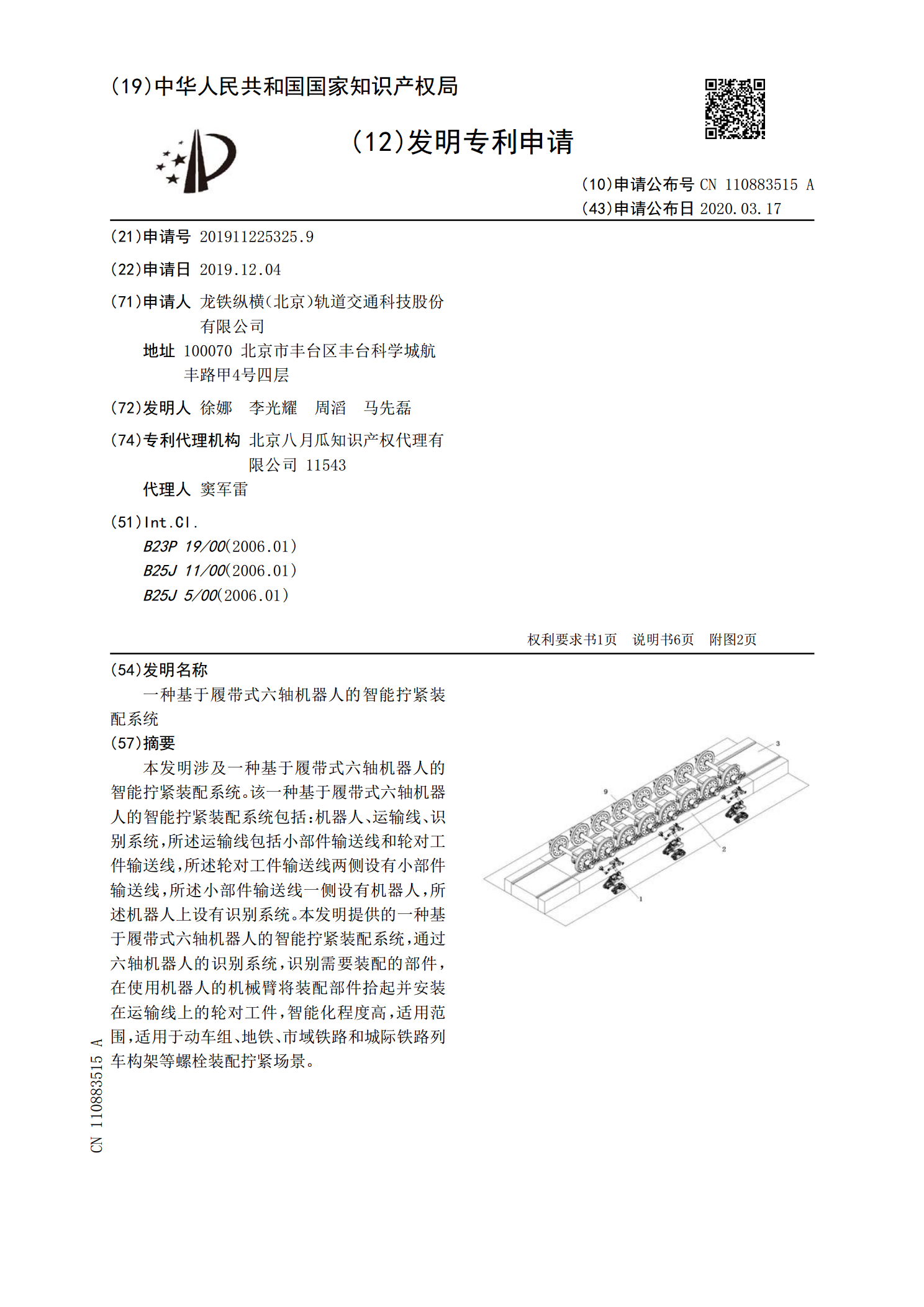
本发明涉及一种基于履带式六轴机器人的智能拧紧装配系统。该一种基于履带式六轴机器人的智能拧紧装配系统包括:机器人、运输线、识别系统,所述运输线包括小部件输送线和轮对工件输送线,所述轮对工件输送线两侧设有小部件输送线,所述小部件输送线一侧设有机器人,所述机器人上设有识别系统。本发明提供的一种基于履带式六轴机器人的智能拧紧装配系统,通过六轴机器人的识别系统,识别需要装配的部件,在使用机器人的机械臂将装配部件拾起并安装在运输线上的轮对工件,智能化程度高,适用范围,适用于动车组、地铁、市域铁路和城际铁路列车构架等螺
基于人机交互式六轴机器人和螺丝供给机的螺丝拧紧系统.pdf
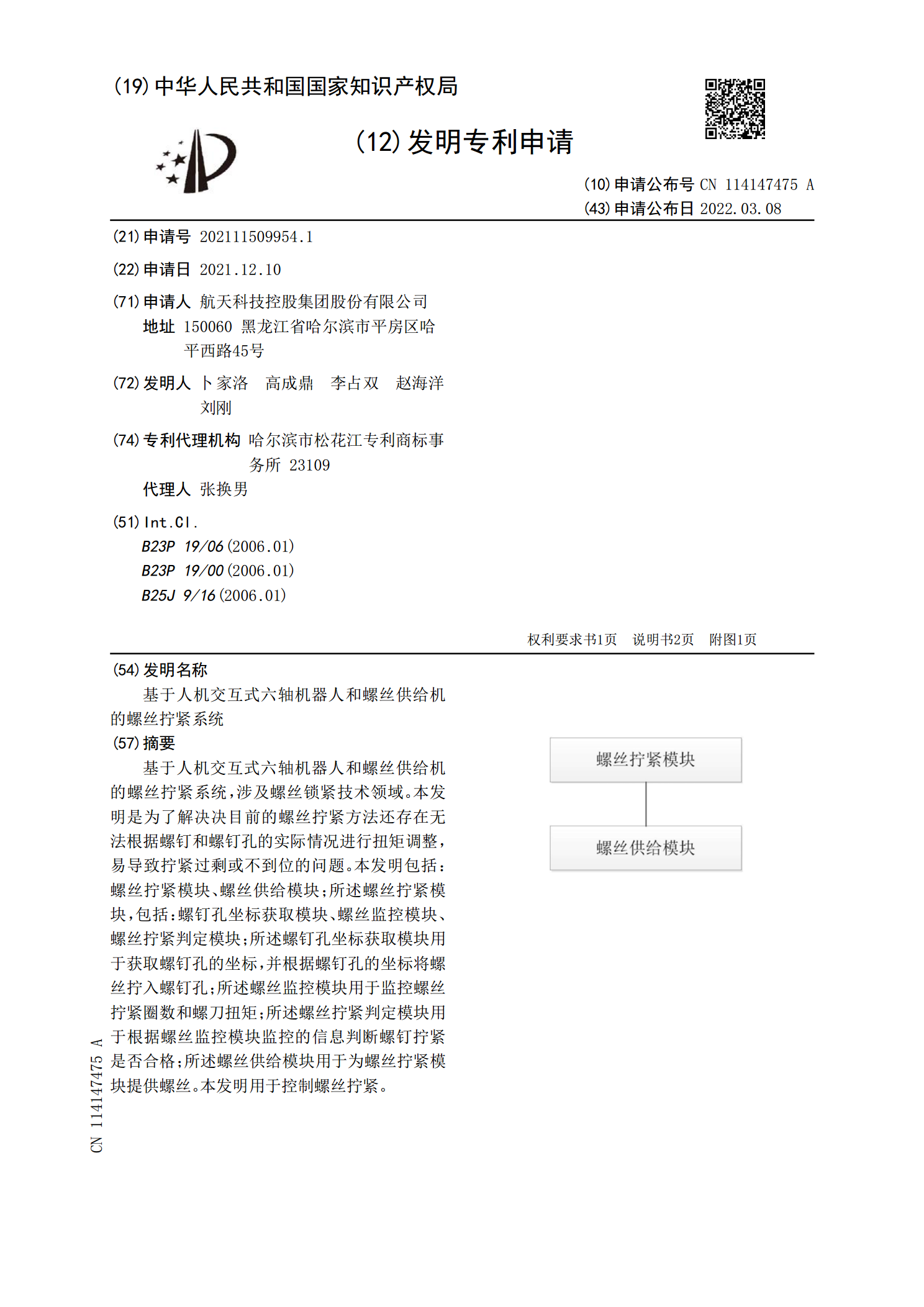
基于人机交互式六轴机器人和螺丝供给机的螺丝拧紧系统,涉及螺丝锁紧技术领域。本发明是为了解决决目前的螺丝拧紧方法还存在无法根据螺钉和螺钉孔的实际情况进行扭矩调整,易导致拧紧过剩或不到位的问题。本发明包括:螺丝拧紧模块、螺丝供给模块;所述螺丝拧紧模块,包括:螺钉孔坐标获取模块、螺丝监控模块、螺丝拧紧判定模块;所述螺钉孔坐标获取模块用于获取螺钉孔的坐标,并根据螺钉孔的坐标将螺丝拧入螺钉孔;所述螺丝监控模块用于监控螺丝拧紧圈数和螺刀扭矩;所述螺丝拧紧判定模块用于根据螺丝监控模块监控的信息判断螺钉拧紧是否合格;所述

基于六轴机器人的PCB智能插装站控制系统的研究.docx
基于六轴机器人的PCB智能插装站控制系统的研究基于六轴机器人的PCB智能插装站控制系统的研究摘要:随着电子技术的快速发展,印刷电路板(PCB)已成为现代电子产品的核心组成部分之一。为了提高生产效率和质量,自动插装站逐渐取代了传统的手工插装方式。本文以基于六轴机器人的PCB智能插装站控制系统为研究方向,探讨了六轴机器人在PCB组装过程中的应用和控制方法。1.引言随着电子产品的快速更新换代,PCB的设计和制造变得越来越复杂。传统的手工插装方式已经无法满足现代电子产品的生产需求,因此自动化插装技术逐渐被引入。六

基于六轴驱动机器人的智能控制与实现.pptx
汇报人:/目录0102定义与功能结构与特点应用领域03机器学习与人工智能传感器融合技术路径规划与导航远程控制与遥控技术04控制算法设计运动学与动力学建模感知与决策系统执行器与驱动系统05控制器设计传感器选型与配置执行器选择与安装通信接口与网络配置06软件开发环境与工具控制算法编程与实现人机交互界面设计系统集成与测试07实际应用场景介绍效果评估标准与方法性能测试与分析改进与优化方向汇报人:

一种基于智能工业机器人的自动化生产装配系统.pdf
本发明涉及机器人设备领域,公开了一种基于智能工业机器人的自动化生产装配系统,其包括底板,底板上固定有焊接机械手,底板的下方设有小车轮组;第一齿条和第一导轨组上设置有沿第一导轨组直线运动的焊接机械手,焊接机械手包括焊接平台,焊接平台的下方设置有支撑腿,支撑腿滑动设置在第一导轨组上,第一电机的输出轴同轴连接有第一齿轮,第一齿轮和第一齿条相互啮合,第一电机的一侧设置有安装杆,安装杆的底部设置有支撑轮,支撑轮与底板滚动接触;焊接平台上安装有转盘,转盘的外部套设有齿轮环,齿轮环的内侧面与转盘的外侧面过盈配合,齿轮环