
自平衡行驶装置及其控制方法.pdf

一吃****昕靓


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共33页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自平衡行驶装置及其控制方法.pdf
本文描述了一种自平衡行驶装置及其控制方法、计算机可读存储介质以及计算设备。自平衡行驶装置包括架体、前轮转向系统、后轮驱动系统、传感器单元、控制器,其中控制器被配置为基于传感器感测的行驶装置相关的参数执行对于前转轴驱动装置驱动前转轴转动的角速度的控制以使得行驶装置以目标倾角保持平衡。自平衡行驶装置还可以包括动量轮系统,并且控制器还可以被配置为执行对于动量轮驱动装置驱动动量轮的转动的力矩的控制以使得行驶装置以目标倾角保持平衡。

高稳定智能自平衡装置及其控制方法.pdf
本发明提供一种高稳定智能自平衡装置及其控制方法,包括外框、可转动设置于所述外框上的封闭外壳、可转动设置于所述外壳内的旋转体、驱动所述外壳的第二驱动装置、驱动旋转体的第一驱动装置、检测组件、处理装置和控制装置,所述外壳的转动轴与所述旋转体的转动轴相垂直,所述检测组件包括用于采集数据的角度传感器、转速传感器、陀螺仪传感器和加速度传感器,所述处理装置分别连接所述检测组件和控制装置,所述控制装置连接所述第一驱动装置和第二驱动装置。本发明的高稳定智能自平衡装置,可安装在各种需要维持平衡的设备,尤其是动态不稳定设备(

平衡车行驶的控制方法、装置及伺服控制系统.pdf
本申请提供了平衡车行驶的控制方法、装置及伺服控制系统,其中一种方法包括:在平衡车行驶方向的路面上,获取目标路面区域与平衡车之间的目标路面信息;依据所述目标路面信息,判断所述目标路面区域内是否包含非平整区域;若所述目标路面区域内不包含非平整区域,或,所述目标路面区域内包含的非平整区域与平衡车的行驶区域的交集为空集,控制所述平衡车继续按原始操作行驶;若所述非平整区域与平衡车的行驶区域的交集不为空集,则控制所述平衡车按预设操作行驶。本申请通过距离检测装置和控制器的配合使用,可以实现检测路面是否平整的目的。

行驶装置、行驶装置的控制方法以及行驶装置的控制程序.pdf
本发明提供了一种行驶装置,其包括控制器,该控制器在接收到转向指示时:向第一驱动轮的基于转向指示计算出的用于以旋转的方式驱动第一驱动轮的第一旋转量增加基于驾乘者的重心信息计算出的第一校正量,并且向第二驱动轮的基于转向指示计算出的用于以旋转的方式驱动第二驱动轮的第二旋转量增加基于驾乘者的重心信息计算出的第二校正量。
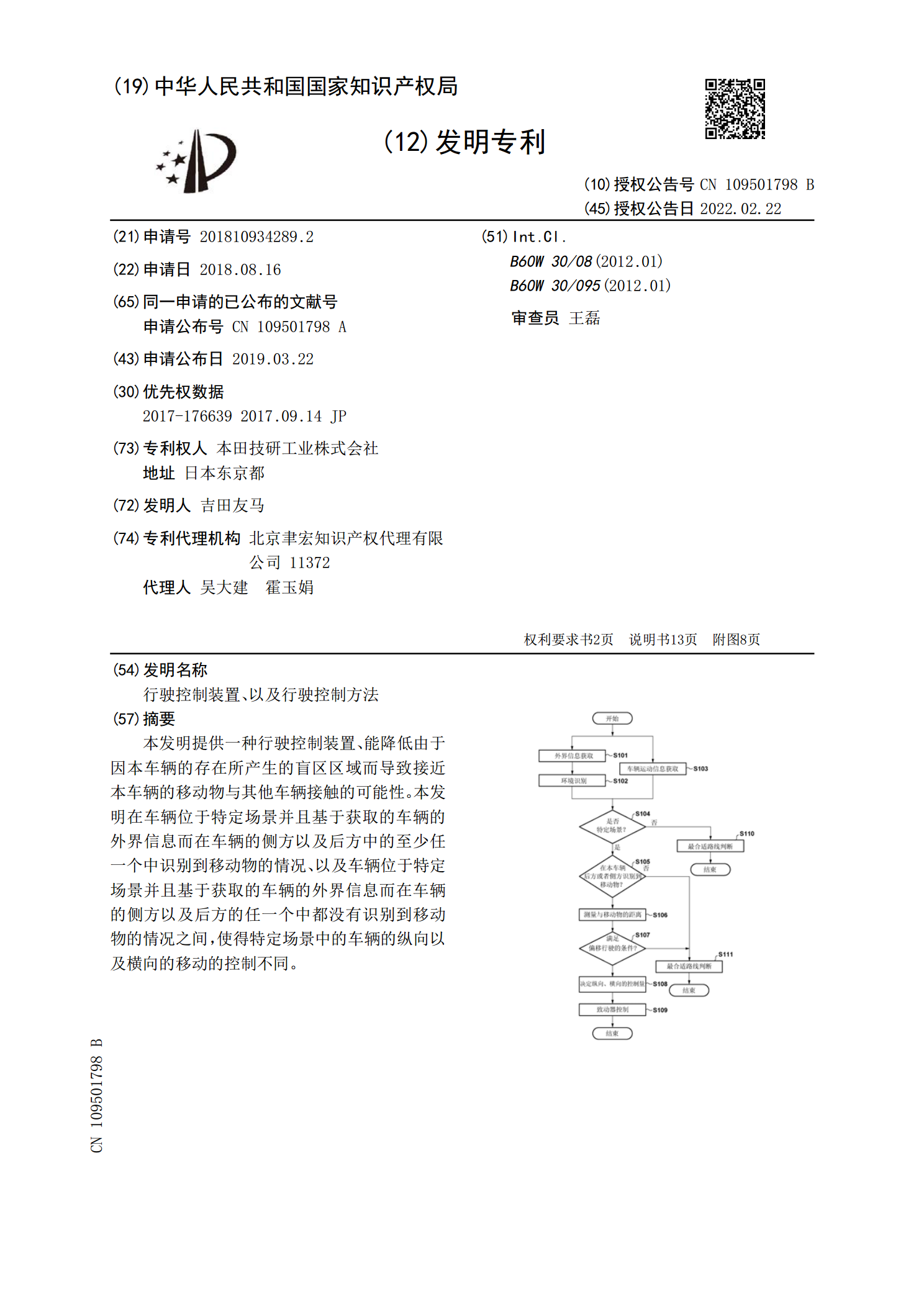
行驶控制装置、以及行驶控制方法.pdf
本发明提供一种行驶控制装置、能降低由于因本车辆的存在所产生的盲区区域而导致接近本车辆的移动物与其他车辆接触的可能性。本发明在车辆位于特定场景并且基于获取的车辆的外界信息而在车辆的侧方以及后方中的至少任一个中识别到移动物的情况、以及车辆位于特定场景并且基于获取的车辆的外界信息而在车辆的侧方以及后方的任一个中都没有识别到移动物的情况之间,使得特定场景中的车辆的纵向以及横向的移动的控制不同。