
一种机械自锁防坠落装置.pdf

邻家****mk


1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机械自锁防坠落装置.pdf
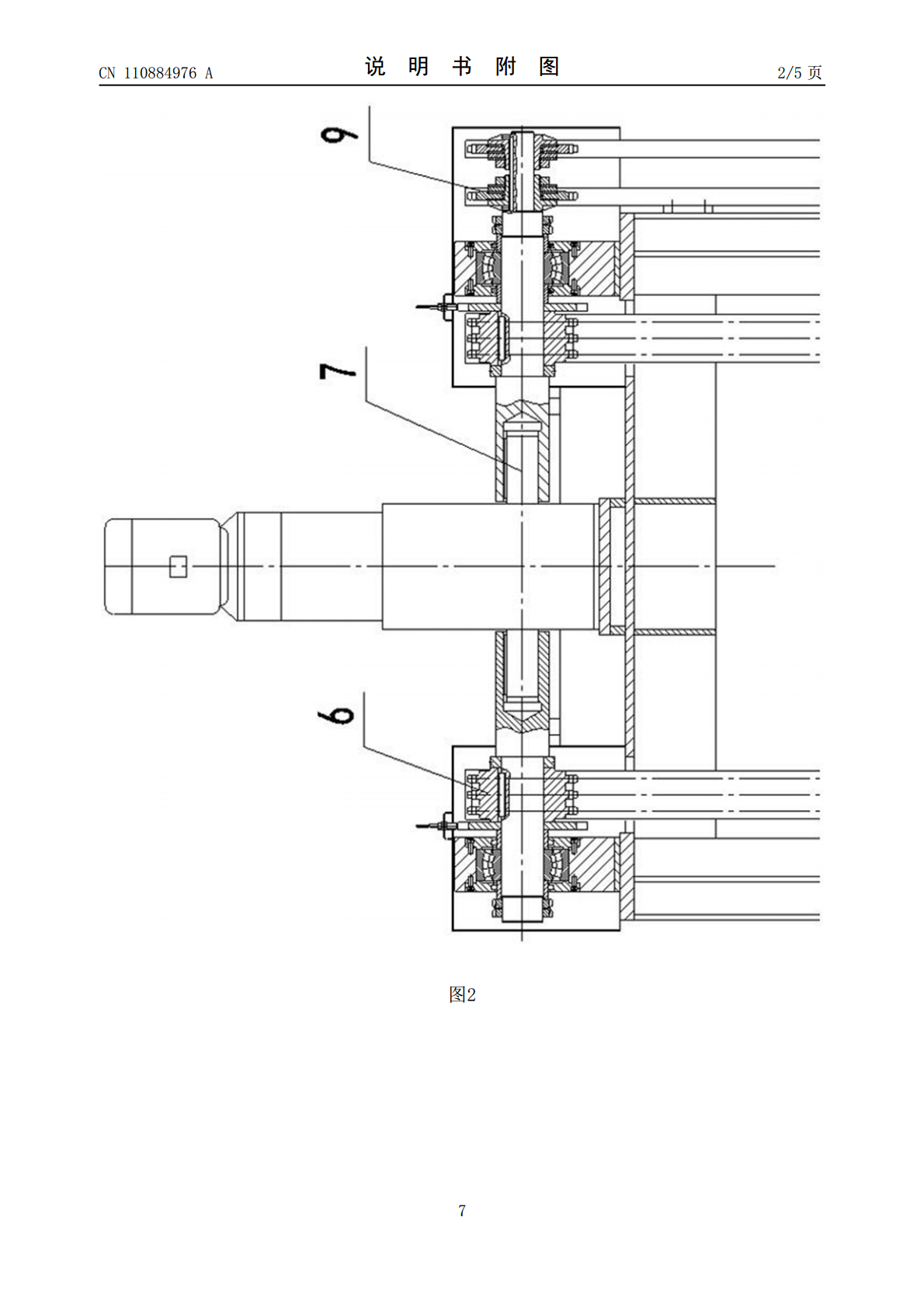
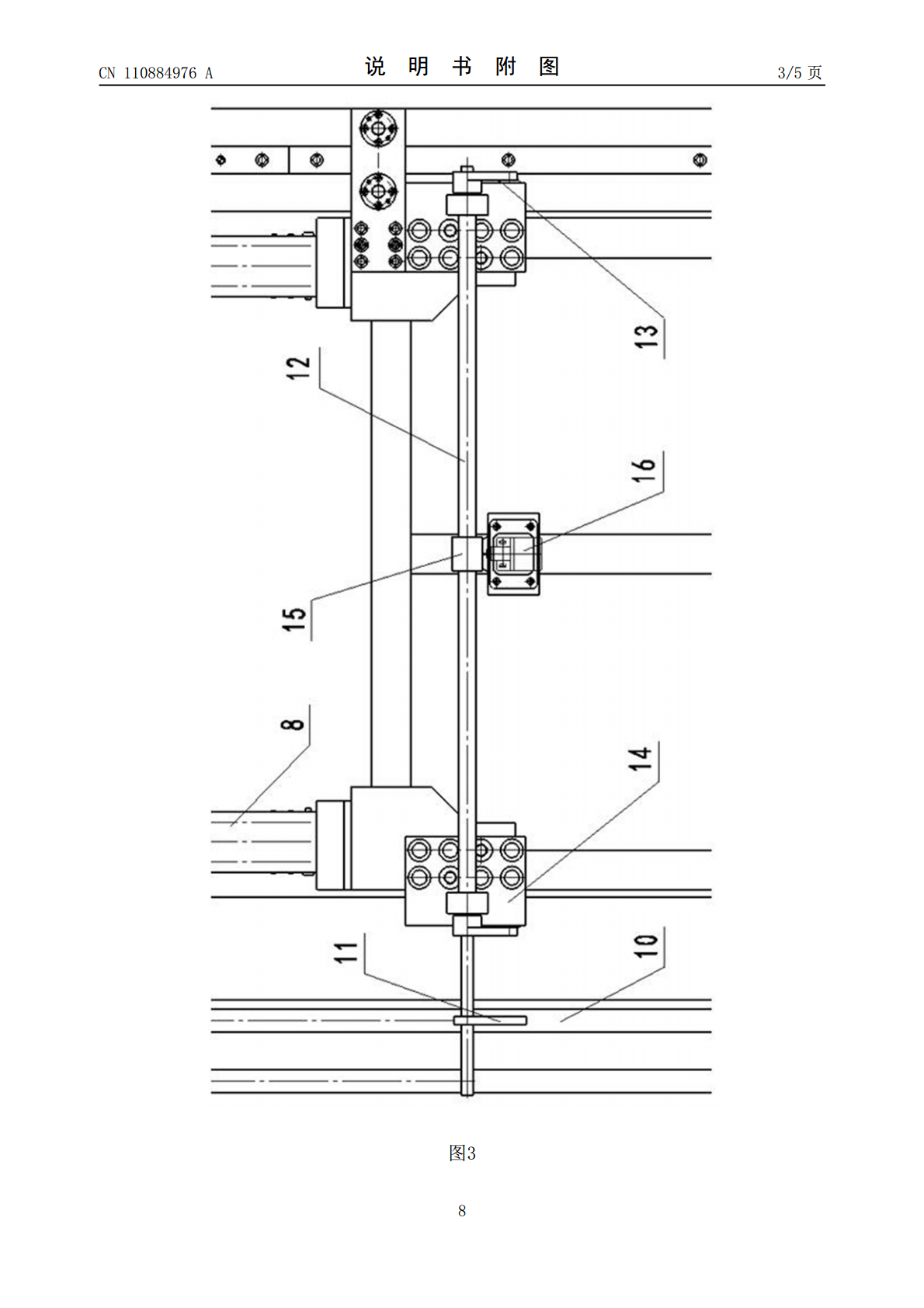
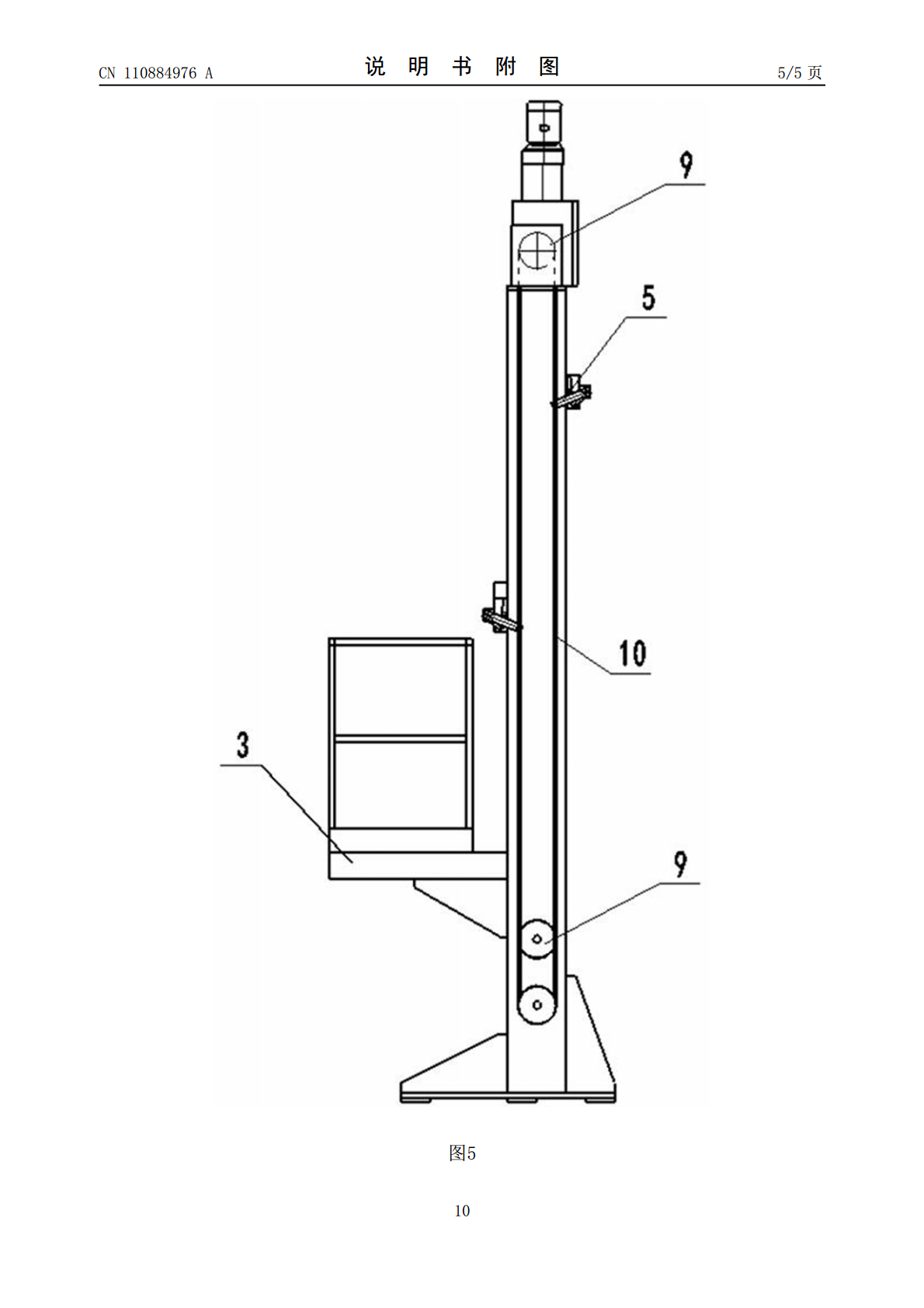
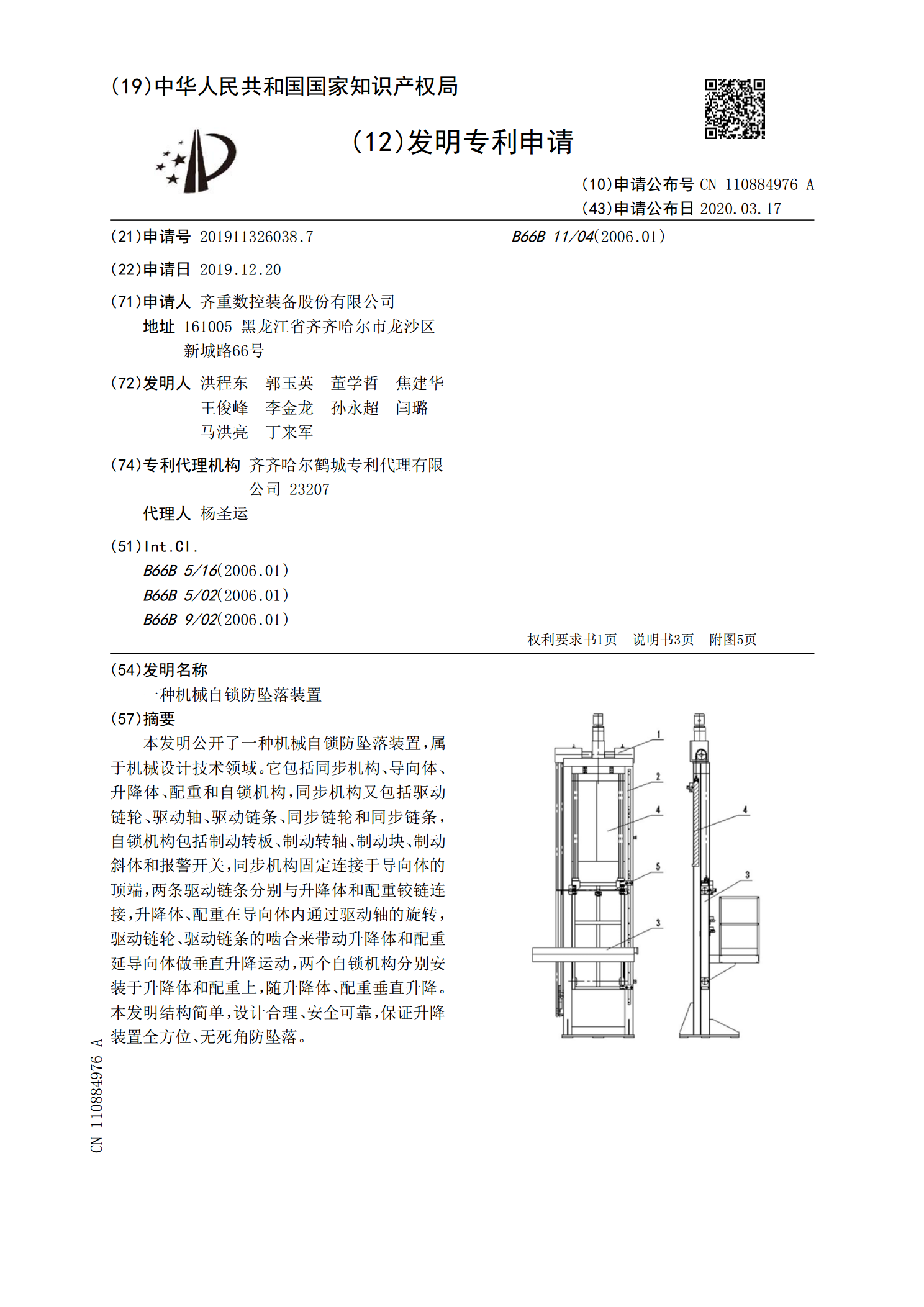
本发明公开了一种机械自锁防坠落装置,属于机械设计技术领域。它包括同步机构、导向体、升降体、配重和自锁机构,同步机构又包括驱动链轮、驱动轴、驱动链条、同步链轮和同步链条,自锁机构包括制动转板、制动转轴、制动块、制动斜体和报警开关,同步机构固定连接于导向体的顶端,两条驱动链条分别与升降体和配重铰链连接,升降体、配重在导向体内通过驱动轴的旋转,驱动链轮、驱动链条的啮合来带动升降体和配重延导向体做垂直升降运动,两个自锁机构分别安装于升降体和配重上,随升降体、配重垂直升降。本发明结构简单,设计合理、安全可靠,保证升
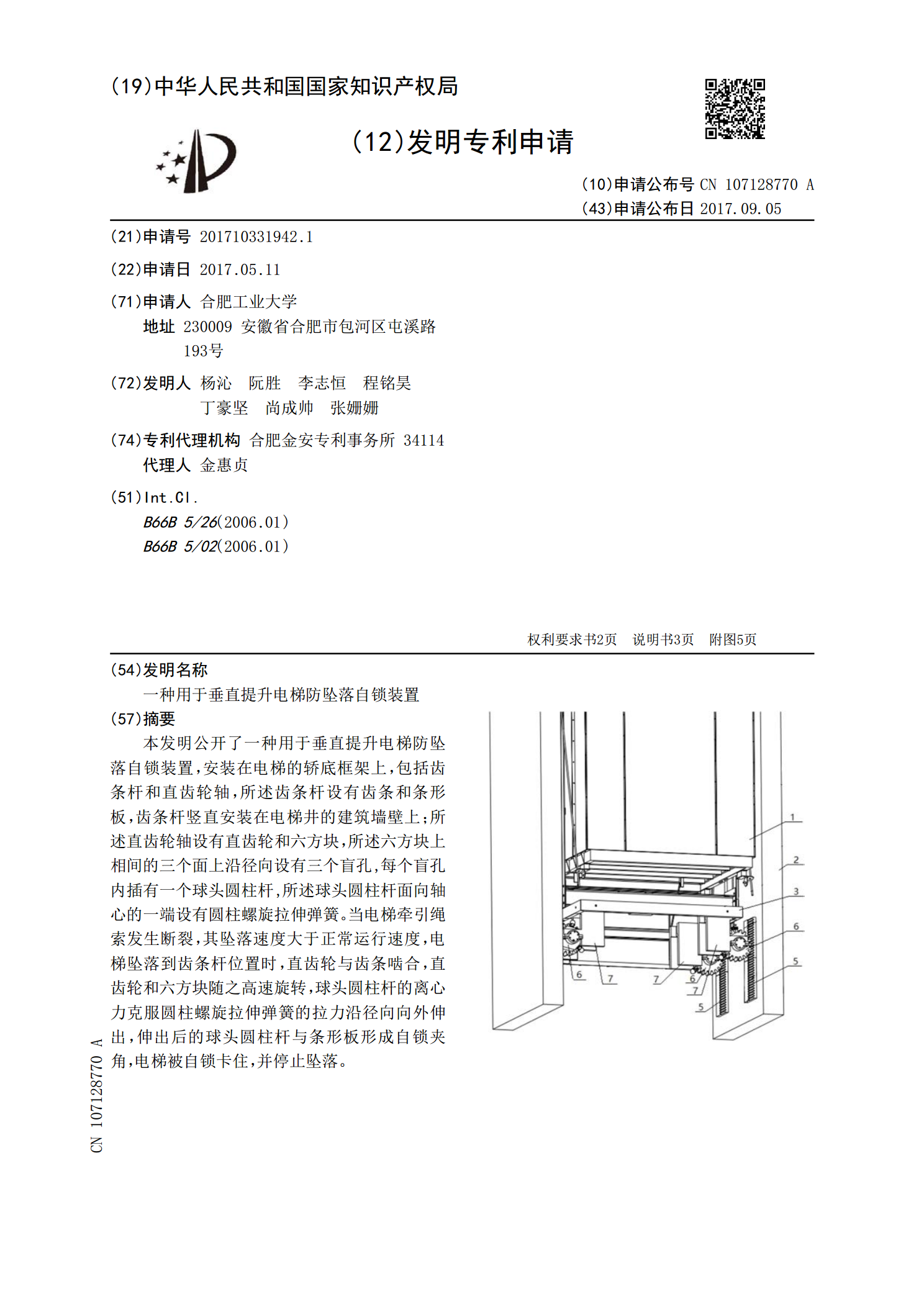
一种用于垂直提升电梯防坠落自锁装置.pdf
本发明公开了一种用于垂直提升电梯防坠落自锁装置,安装在电梯的轿底框架上,包括齿条杆和直齿轮轴,所述齿条杆设有齿条和条形板,齿条杆竖直安装在电梯井的建筑墙壁上;所述直齿轮轴设有直齿轮和六方块,所述六方块上相间的三个面上沿径向设有三个盲孔,每个盲孔内插有一个球头圆柱杆,所述球头圆柱杆面向轴心的一端设有圆柱螺旋拉伸弹簧。当电梯牵引绳索发生断裂,其坠落速度大于正常运行速度,电梯坠落到齿条杆位置时,直齿轮与齿条啮合,直齿轮和六方块随之高速旋转,球头圆柱杆的离心力克服圆柱螺旋拉伸弹簧的拉力沿径向向外伸出,伸出后的球头

防坠落自锁器.pdf
本发明公开了一种防坠落自锁器,包括自锁器机体,自锁器机体包括上平板、下平板、连接上平板与下平板的收容槽以及与上平板相连接的凸台;在自锁器机体的一端设有一对与自锁器机体平行且相互之间平行的第一导轮,在自锁器机体的另一端设有一对与自锁器机体、第一导轮以及相互之间平行的第二导轮,在自锁器机体的另一端上平板上设有与其垂直的第三导轮,自锁器机体的凸台上设有通过转动销轴与其连接的弹簧和锁止块,弹簧的一端与凸台连接,另一端与锁止块连接。本发明结构简单、安装方便、操作简易、安全性能极高、成本较低,易于量产。
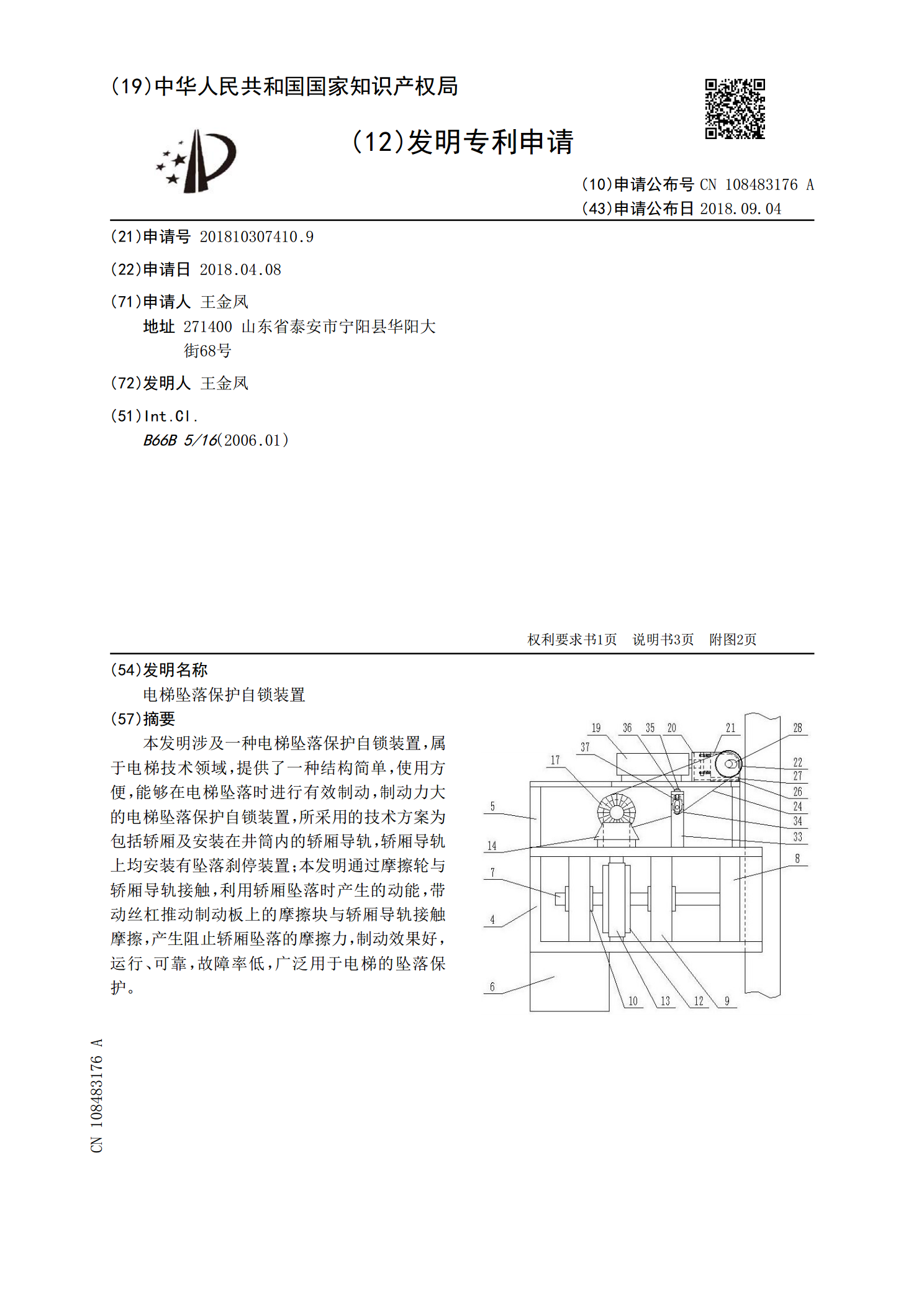
电梯坠落保护自锁装置.pdf
本发明涉及一种电梯坠落保护自锁装置,属于电梯技术领域,提供了一种结构简单,使用方便,能够在电梯坠落时进行有效制动,制动力大的电梯坠落保护自锁装置,所采用的技术方案为包括轿厢及安装在井筒内的轿厢导轨,轿厢导轨上均安装有坠落刹停装置;本发明通过摩擦轮与轿厢导轨接触,利用轿厢坠落时产生的动能,带动丝杠推动制动板上的摩擦块与轿厢导轨接触摩擦,产生阻止轿厢坠落的摩擦力,制动效果好,运行、可靠,故障率低,广泛用于电梯的坠落保护。
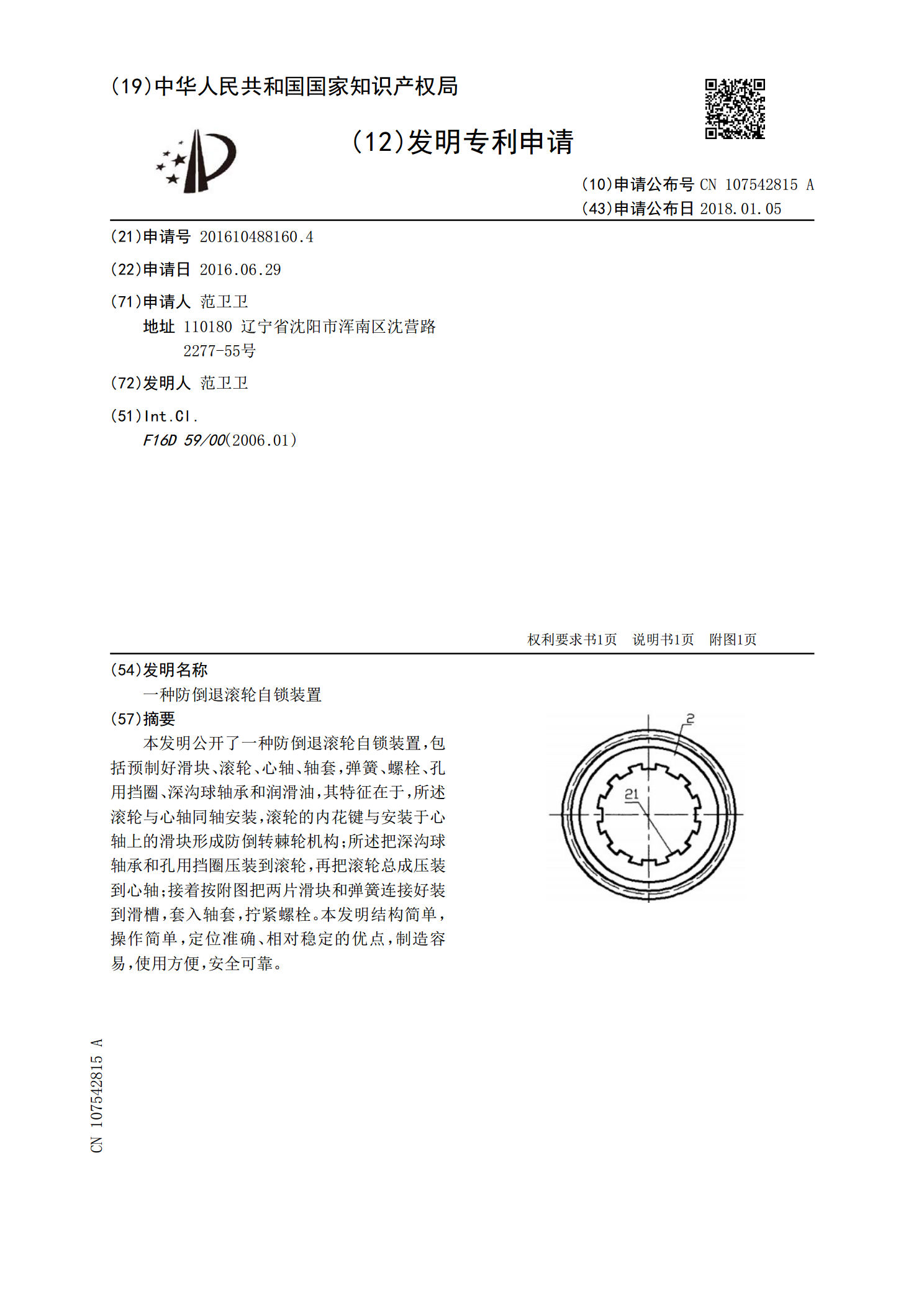
一种防倒退滚轮自锁装置.pdf
本发明公开了一种防倒退滚轮自锁装置,包括预制好滑块、滚轮、心轴、轴套,弹簧、螺栓、孔用挡圈、深沟球轴承和润滑油,其特征在于,所述滚轮与心轴同轴安装,滚轮的内花键与安装于心轴上的滑块形成防倒转棘轮机构;所述把深沟球轴承和孔用挡圈压装到滚轮,再把滚轮总成压装到心轴;接着按附图把两片滑块和弹簧连接好装到滑槽,套入轴套,拧紧螺栓。本发明结构简单,操作简单,定位准确、相对稳定的优点,制造容易,使用方便,安全可靠。