
隧道地质雷达超前预报数据三维采集装置以及采集方法.pdf

邻家****曼玉


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

隧道地质雷达超前预报数据三维采集装置以及采集方法.pdf
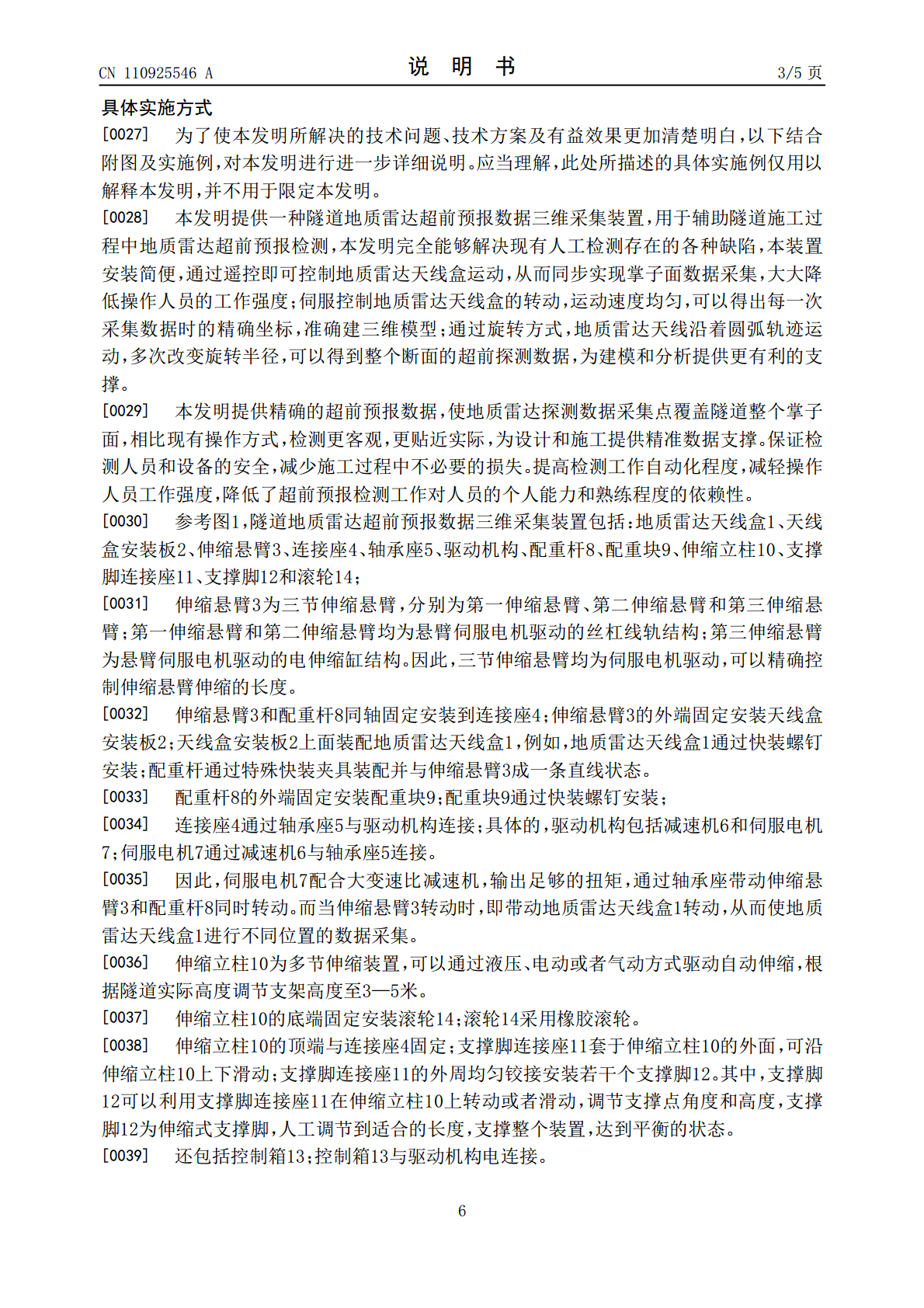
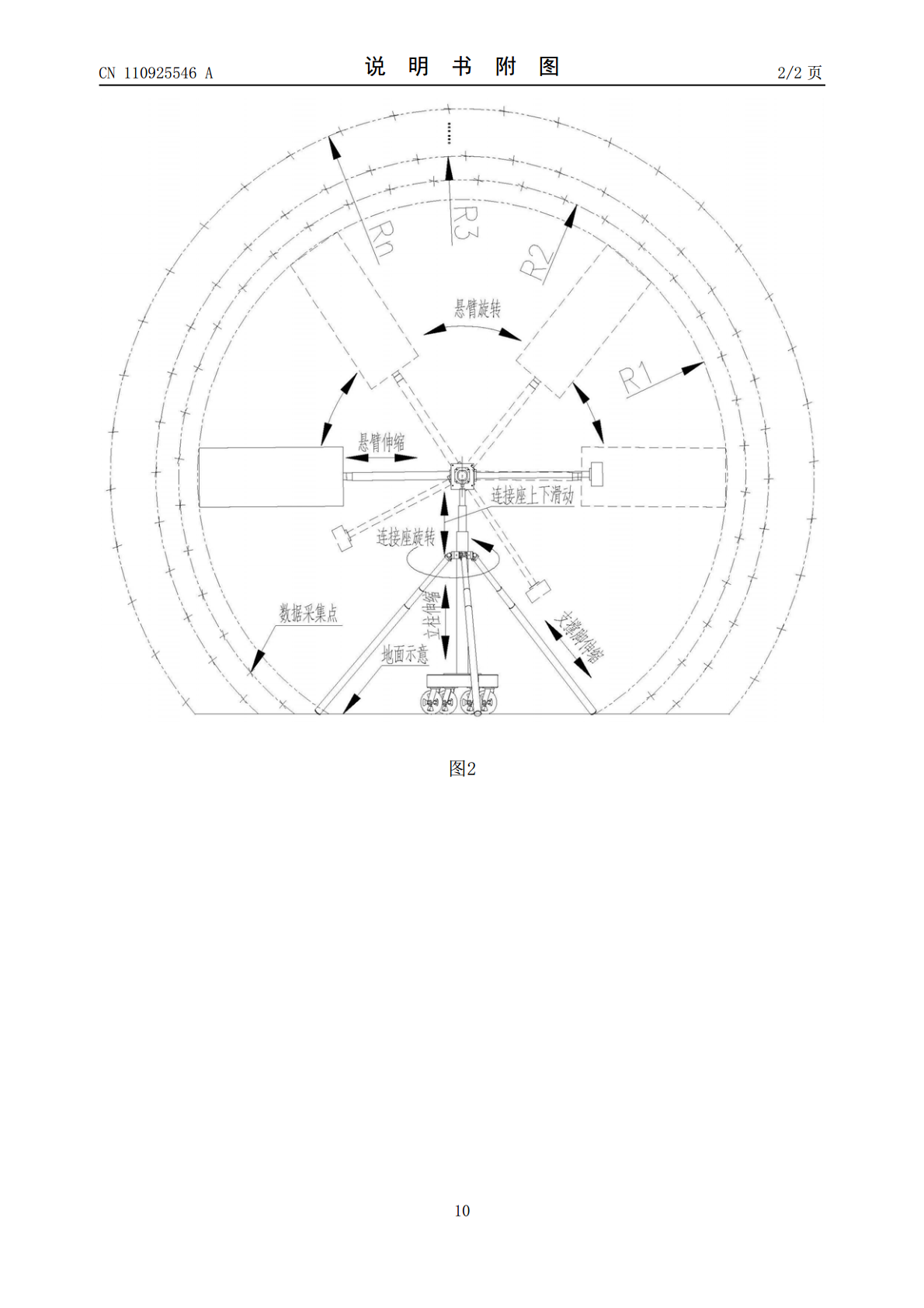
本发明提供一种隧道地质雷达超前预报数据三维采集装置以及采集方法,装置包括:地质雷达天线盒、天线盒安装板、伸缩悬臂、连接座、轴承座、驱动机构、配重杆、配重块、伸缩立柱、支撑脚连接座、支撑脚和滚轮;伸缩悬臂和配重杆同轴固定安装到连接座;伸缩悬臂的外端固定安装天线盒安装板;天线盒安装板上面装配地质雷达天线盒;配重杆的外端固定安装配重块;连接座通过轴承座与驱动机构连接。本发明大大降低人工操作难度,减小操作人员工作强度,保障操作人员和设备的安全;数据采集点可以布满整个掌子面并且提高采集数据的精确程度;通过三维建模以
数据采集系统、方法及隧道地震波超前预报方法.pdf
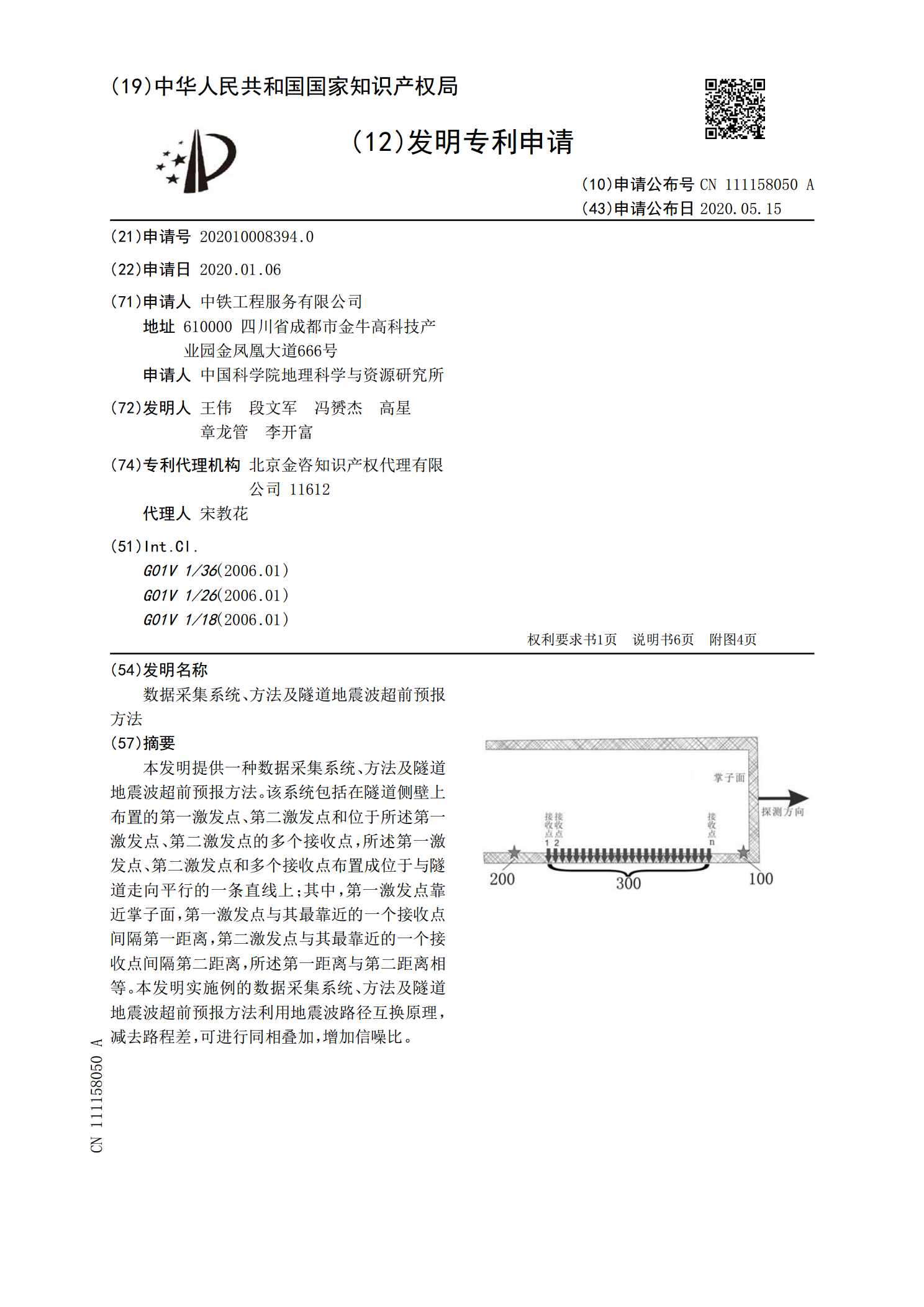
本发明提供一种数据采集系统、方法及隧道地震波超前预报方法。该系统包括在隧道侧壁上布置的第一激发点、第二激发点和位于所述第一激发点、第二激发点的多个接收点,所述第一激发点、第二激发点和多个接收点布置成位于与隧道走向平行的一条直线上;其中,第一激发点靠近掌子面,第一激发点与其最靠近的一个接收点间隔第一距离,第二激发点与其最靠近的一个接收点间隔第二距离,所述第一距离与第二距离相等。本发明实施例的数据采集系统、方法及隧道地震波超前预报方法利用地震波路径互换原理,减去路程差,可进行同相叠加,增加信噪比。

地质雷达在隧道超前地质预报中的应用.docx
地质雷达在隧道超前地质预报中的应用引言:地质雷达是一种常用的隧道勘探工具,因其具有高分辨率、非破坏性、高效率等优点,已被广泛应用于隧道超前地质预报中。本文将从地质雷达的工作原理、应用特点和隧道超前地质预报实际应用案例三个方面来探讨地质雷达在隧道超前地质预报中的应用。一、地质雷达的工作原理地质雷达是一种用以获取地下物质分布情况的探测装备。其工作原理基于电磁波的传播和反射。地质雷达通过向地下发射高频电磁波,再根据接收到的反射波和衰减波,推导出地下物质的分布情况及变化规律。地质雷达技术发展至今,已经衍生出多种型

影响TSP超前地质预报数据采集质量的因素分析.docx
影响TSP超前地质预报数据采集质量的因素分析影响TSP超前地质预报数据采集质量的因素分析摘要:随着科技的发展,TSP超前地质预报作为一种新型的地质预测技术,逐渐受到了广泛的关注和应用。然而,在TSP超前地质预报中,数据采集质量的好坏直接影响着预测结果的准确性和可靠性。本文通过对影响TSP超前地质预报数据采集质量的因素进行分析,旨在提高预测的可靠性和准确性。一、引言TSP超前地质预报作为一种新型的地质预测方法,通过收集和分析地质信息,可以进行地质灾害的预测和预报。然而,在数据采集过程中,存在着一系列的影响因
数据采集方法以及装置.pdf
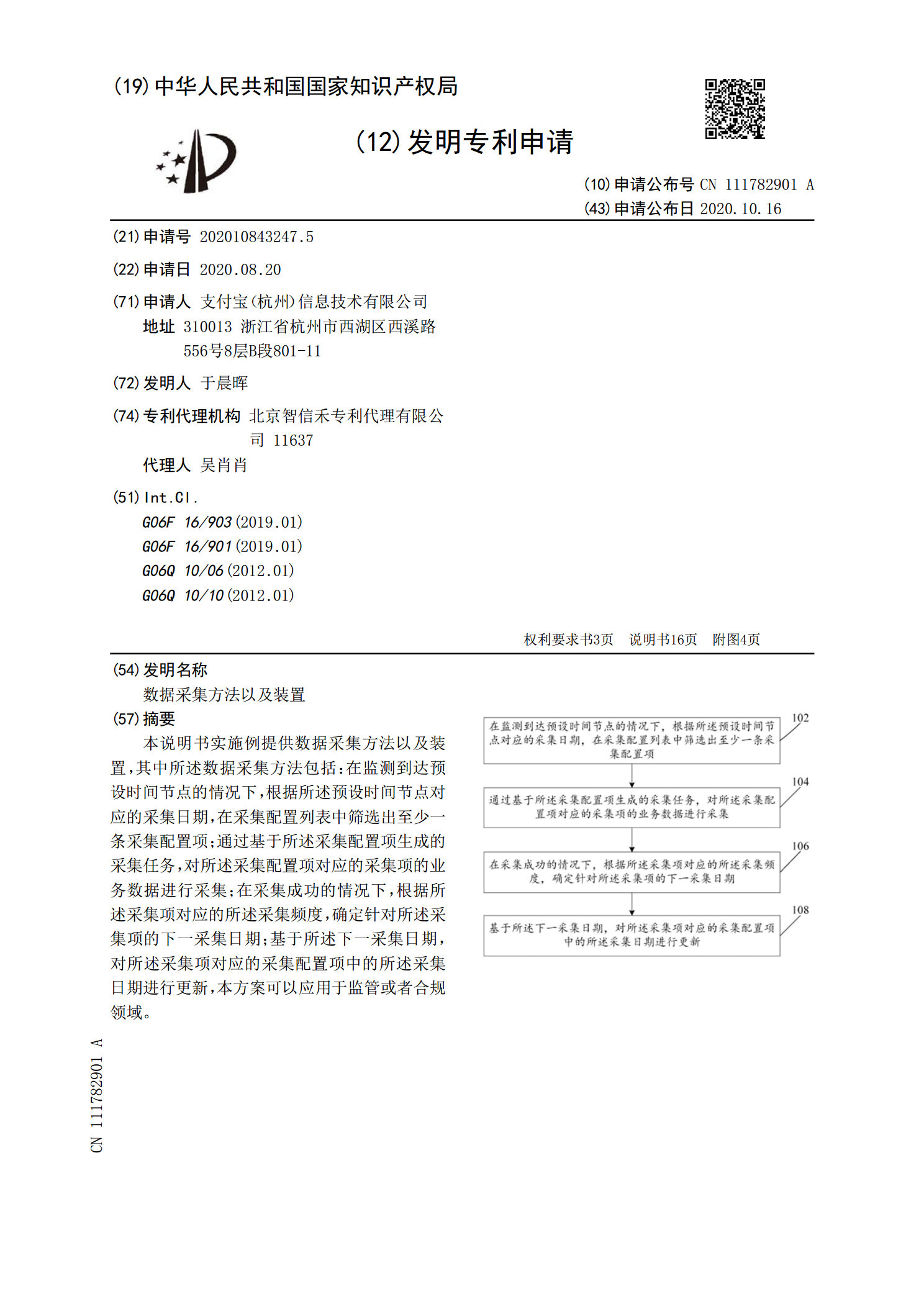
本说明书实施例提供数据采集方法以及装置,其中所述数据采集方法包括:在监测到达预设时间节点的情况下,根据所述预设时间节点对应的采集日期,在采集配置列表中筛选出至少一条采集配置项;通过基于所述采集配置项生成的采集任务,对所述采集配置项对应的采集项的业务数据进行采集;在采集成功的情况下,根据所述采集项对应的所述采集频度,确定针对所述采集项的下一采集日期;基于所述下一采集日期,对所述采集项对应的采集配置项中的所述采集日期进行更新,本方案可以应用于监管或者合规领域。