
车身侧倾联动机构及应用该机构的主动侧倾车辆.pdf

贤惠****66

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车身侧倾联动机构及应用该机构的主动侧倾车辆.pdf
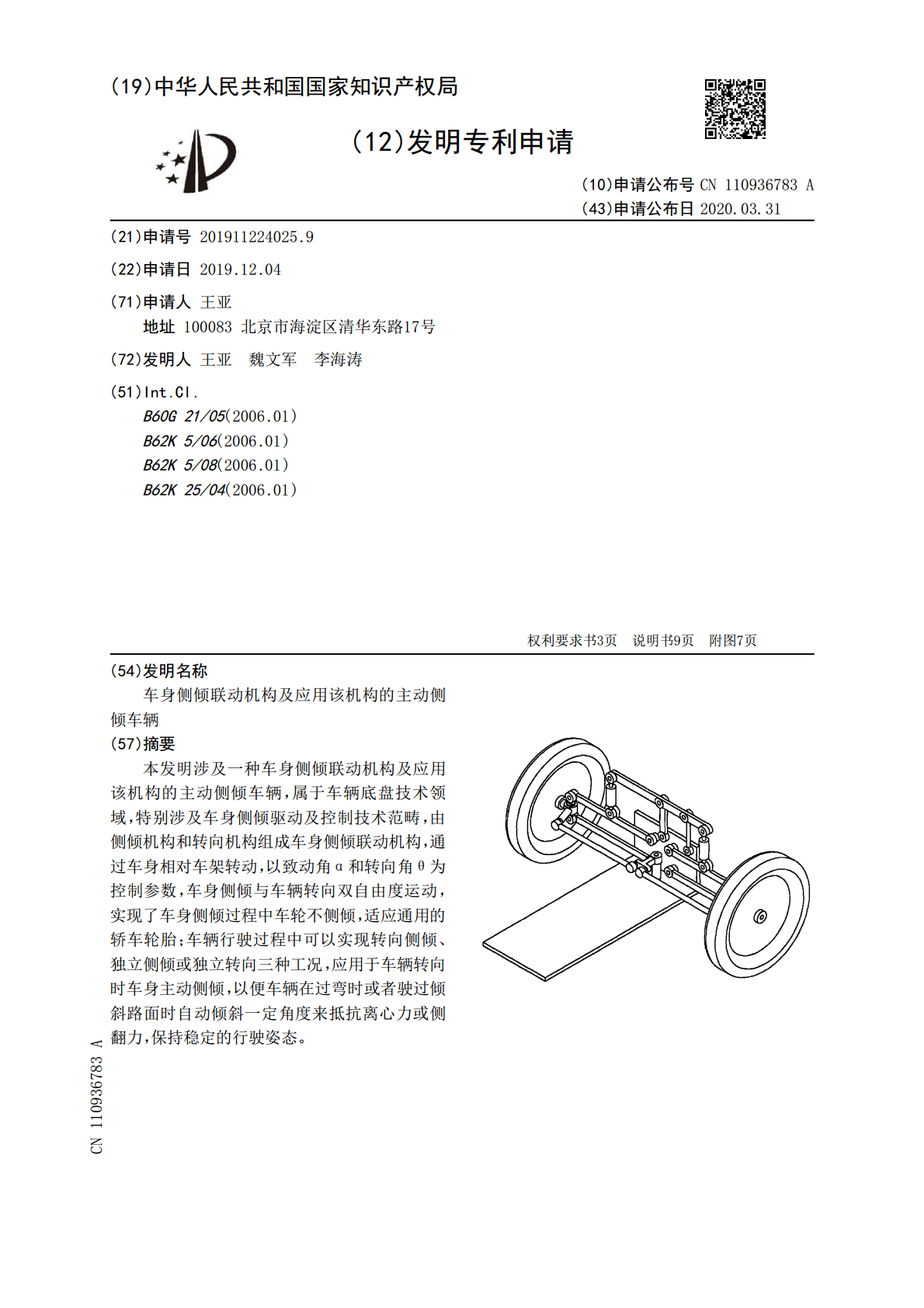
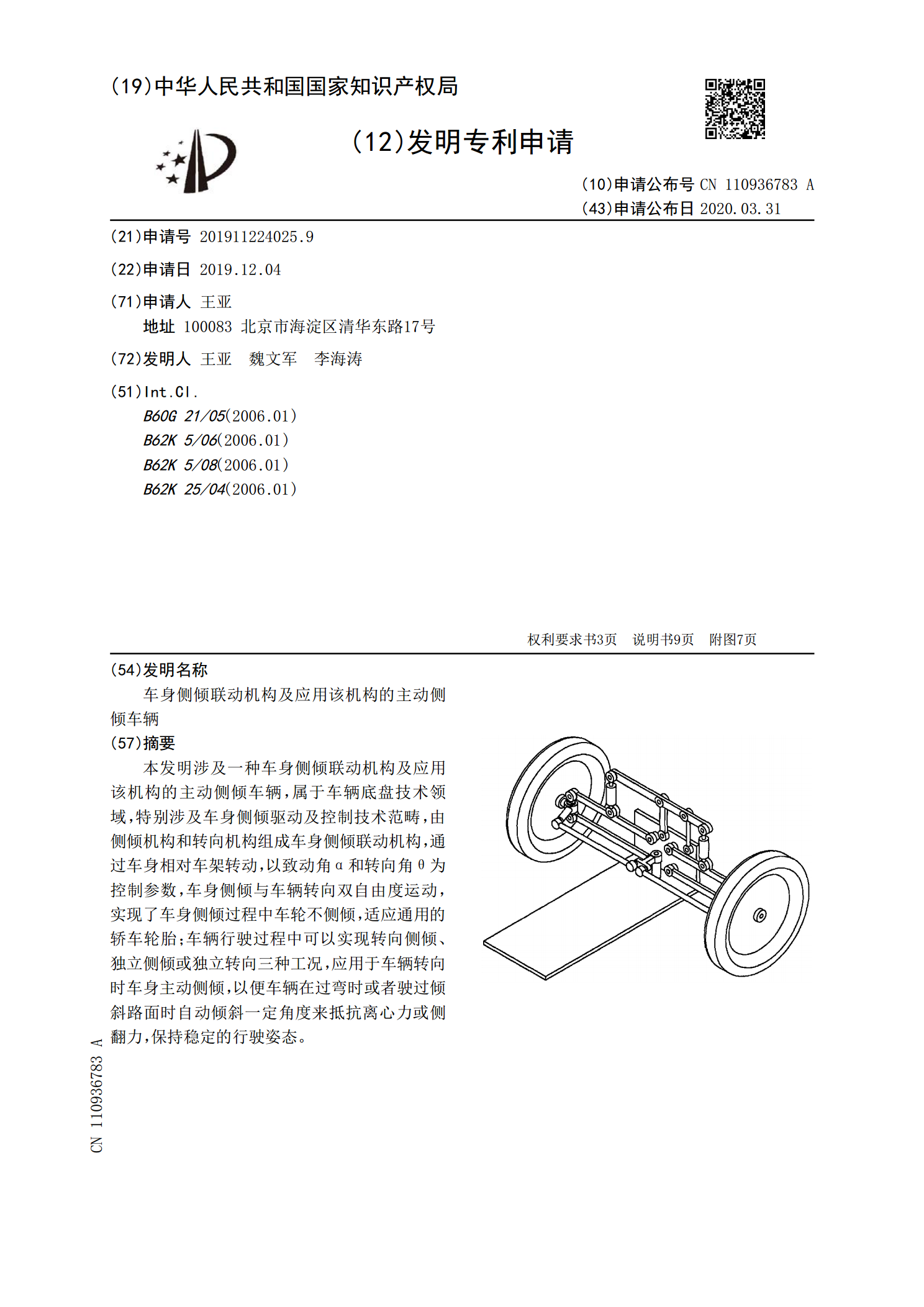
本发明涉及一种车身侧倾联动机构及应用该机构的主动侧倾车辆,属于车辆底盘技术领域,特别涉及车身侧倾驱动及控制技术范畴,由侧倾机构和转向机构组成车身侧倾联动机构,通过车身相对车架转动,以致动角α和转向角θ为控制参数,车身侧倾与车辆转向双自由度运动,实现了车身侧倾过程中车轮不侧倾,适应通用的轿车轮胎;车辆行驶过程中可以实现转向侧倾、独立侧倾或独立转向三种工况,应用于车辆转向时车身主动侧倾,以便车辆在过弯时或者驶过倾斜路面时自动倾斜一定角度来抵抗离心力或侧翻力,保持稳定的行驶姿态。
车身侧倾机构及应用该机构的主动侧倾车辆.pdf
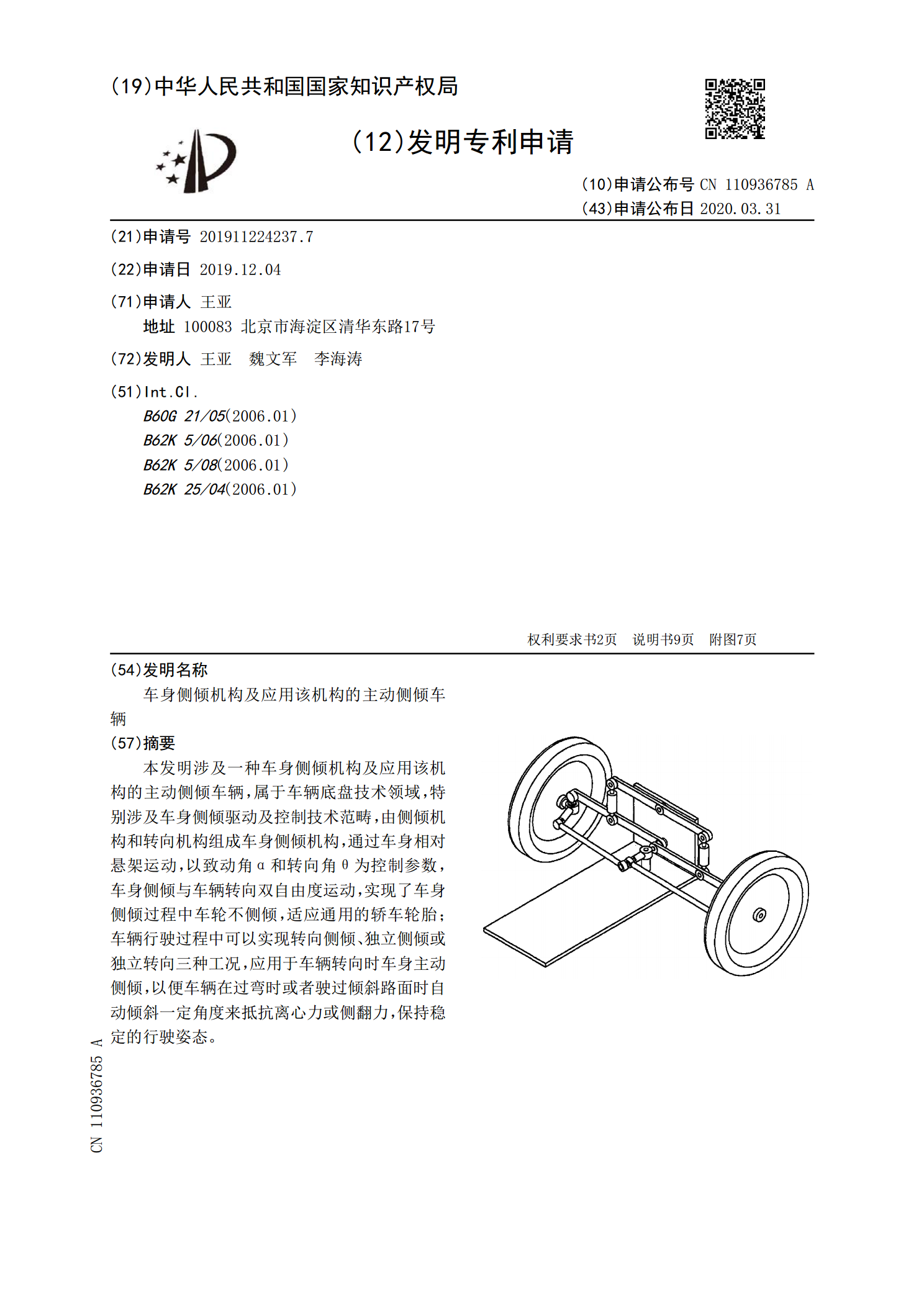
本发明涉及一种车身侧倾机构及应用该机构的主动侧倾车辆,属于车辆底盘技术领域,特别涉及车身侧倾驱动及控制技术范畴,由侧倾机构和转向机构组成车身侧倾机构,通过车身相对悬架运动,以致动角α和转向角θ为控制参数,车身侧倾与车辆转向双自由度运动,实现了车身侧倾过程中车轮不侧倾,适应通用的轿车轮胎;车辆行驶过程中可以实现转向侧倾、独立侧倾或独立转向三种工况,应用于车辆转向时车身主动侧倾,以便车辆在过弯时或者驶过倾斜路面时自动倾斜一定角度来抵抗离心力或侧翻力,保持稳定的行驶姿态。
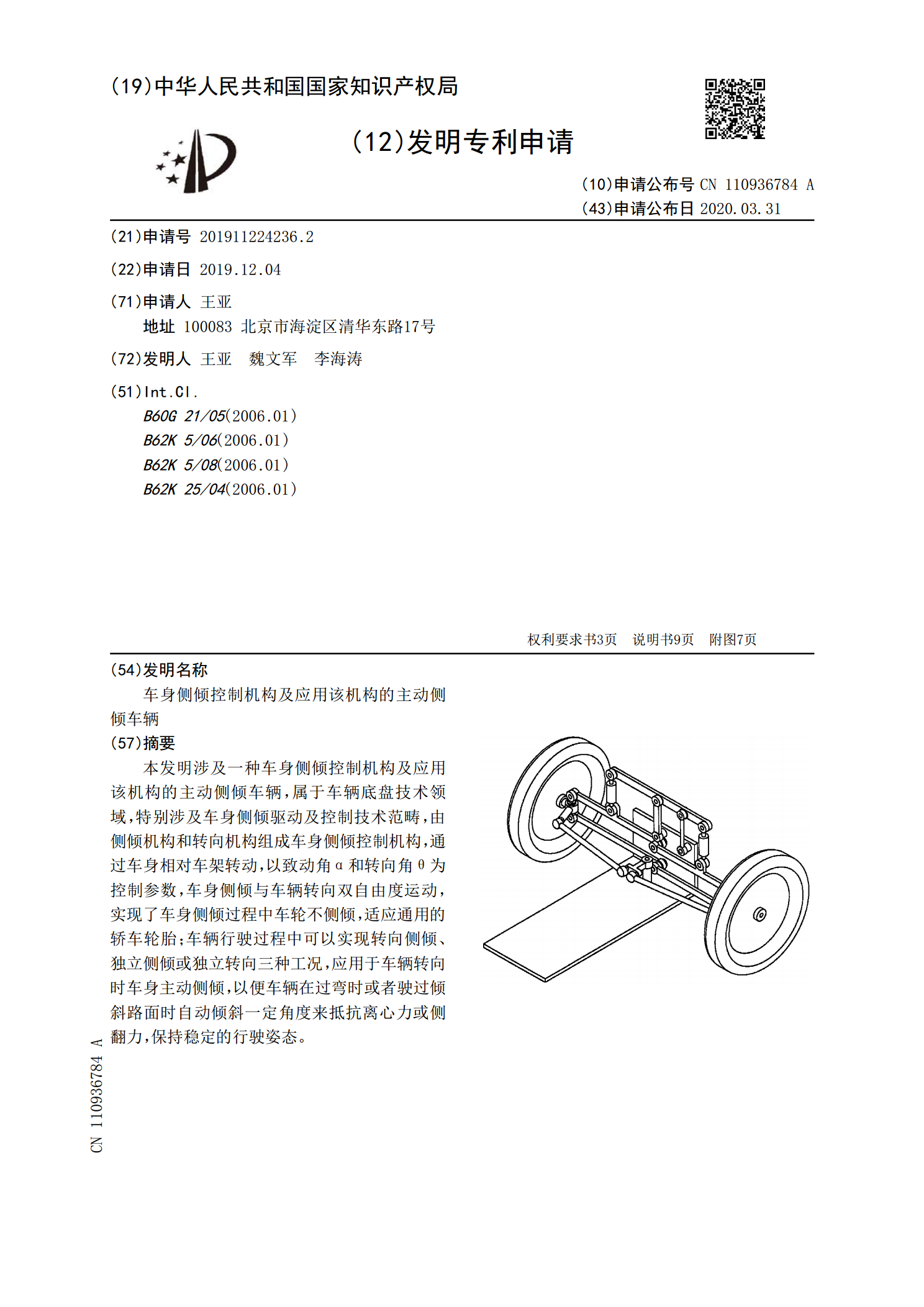
车身侧倾控制机构及应用该机构的主动侧倾车辆.pdf
本发明涉及一种车身侧倾控制机构及应用该机构的主动侧倾车辆,属于车辆底盘技术领域,特别涉及车身侧倾驱动及控制技术范畴,由侧倾机构和转向机构组成车身侧倾控制机构,通过车身相对车架转动,以致动角α和转向角θ为控制参数,车身侧倾与车辆转向双自由度运动,实现了车身侧倾过程中车轮不侧倾,适应通用的轿车轮胎;车辆行驶过程中可以实现转向侧倾、独立侧倾或独立转向三种工况,应用于车辆转向时车身主动侧倾,以便车辆在过弯时或者驶过倾斜路面时自动倾斜一定角度来抵抗离心力或侧翻力,保持稳定的行驶姿态。
车辆转向侧倾联动机构及主动侧倾车辆.pdf
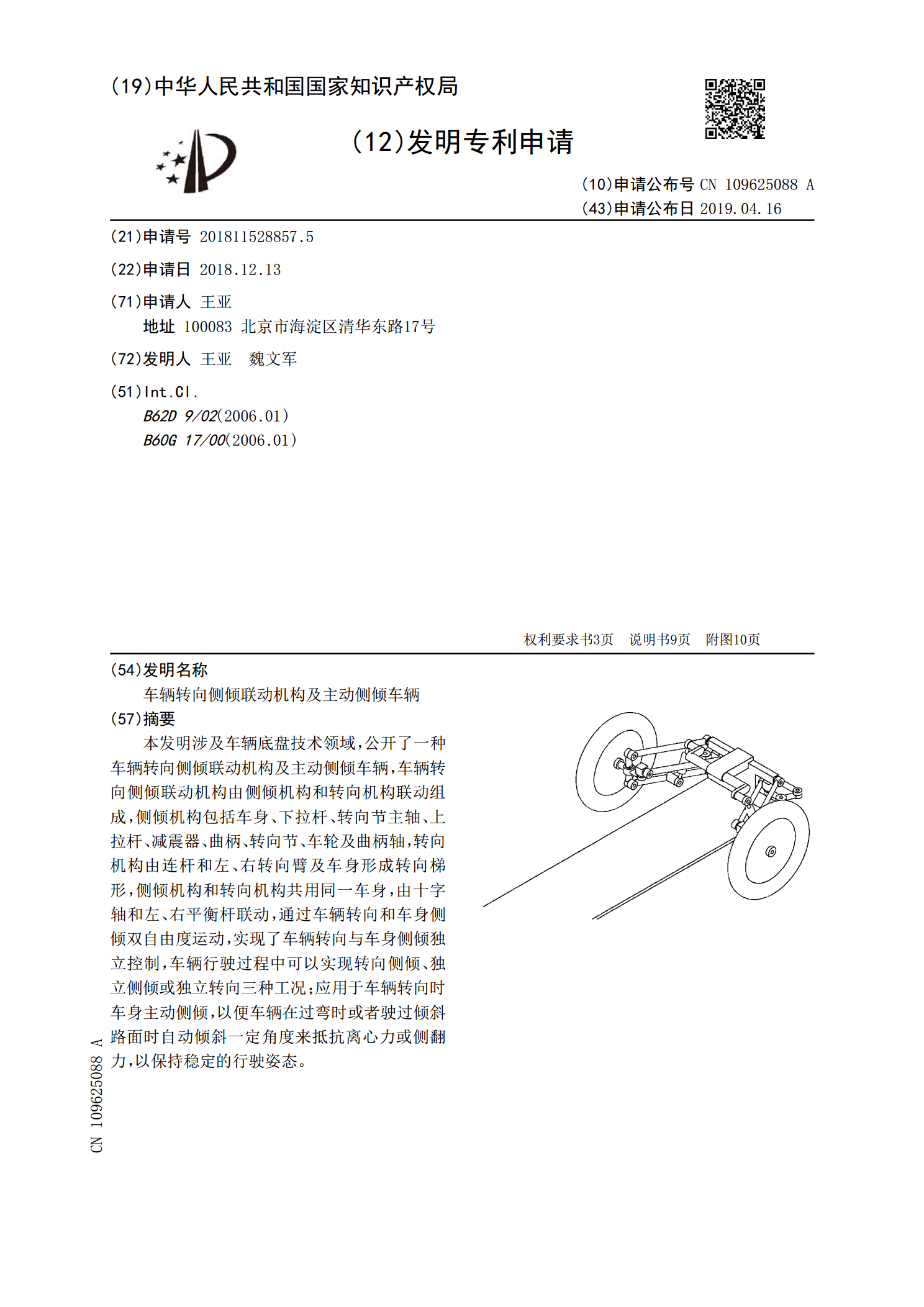
本发明涉及车辆底盘技术领域,公开了一种车辆转向侧倾联动机构及主动侧倾车辆,车辆转向侧倾联动机构由侧倾机构和转向机构联动组成,侧倾机构包括车身、下拉杆、转向节主轴、上拉杆、减震器、曲柄、转向节、车轮及曲柄轴,转向机构由连杆和左、右转向臂及车身形成转向梯形,侧倾机构和转向机构共用同一车身,由十字轴和左、右平衡杆联动,通过车辆转向和车身侧倾双自由度运动,实现了车辆转向与车身侧倾独立控制,车辆行驶过程中可以实现转向侧倾、独立侧倾或独立转向三种工况;应用于车辆转向时车身主动侧倾,以便车辆在过弯时或者驶过倾斜路面时自
车辆转向侧倾联动装置及主动侧倾车辆.pdf
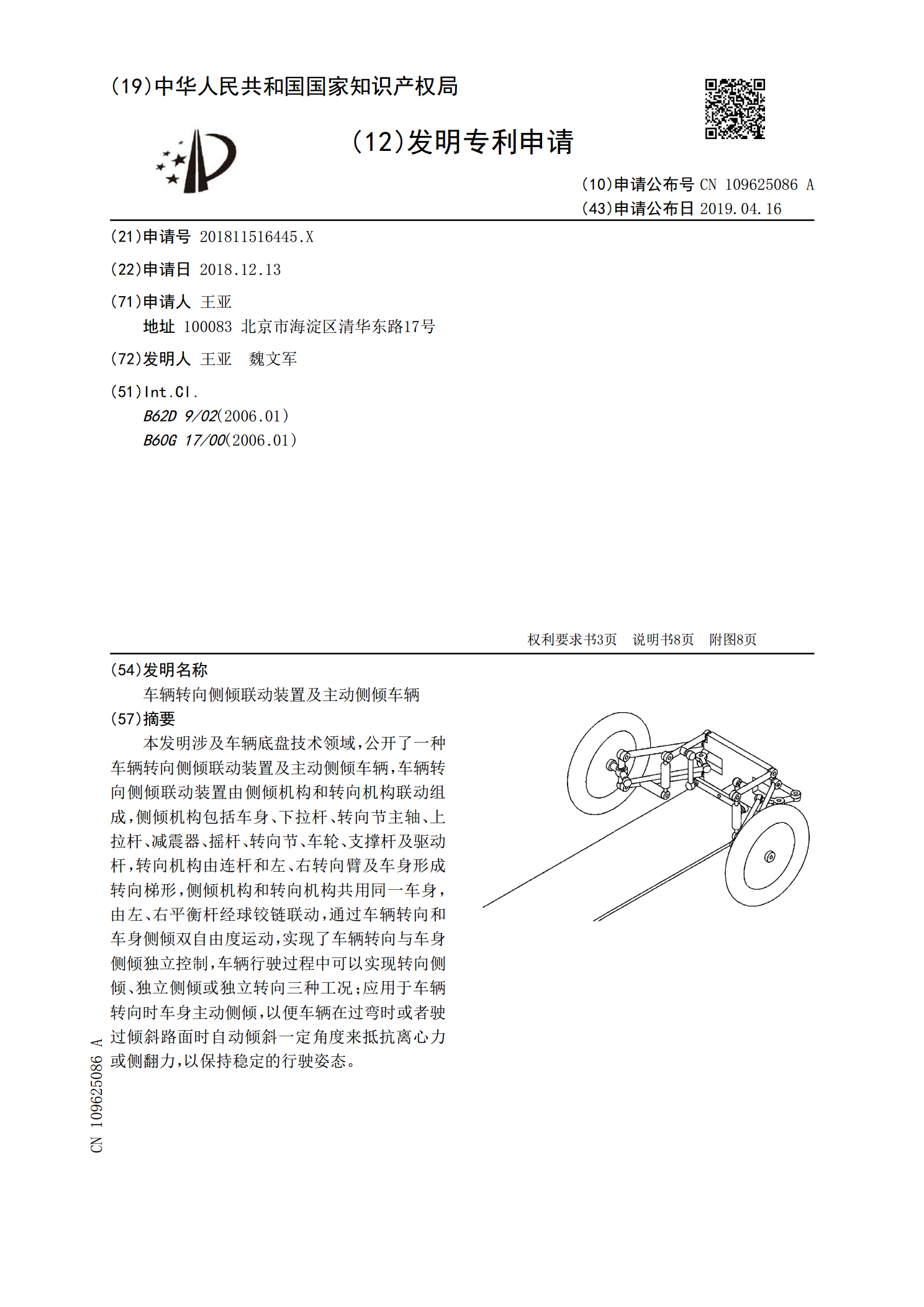
本发明涉及车辆底盘技术领域,公开了一种车辆转向侧倾联动装置及主动侧倾车辆,车辆转向侧倾联动装置由侧倾机构和转向机构联动组成,侧倾机构包括车身、下拉杆、转向节主轴、上拉杆、减震器、摇杆、转向节、车轮、支撑杆及驱动杆,转向机构由连杆和左、右转向臂及车身形成转向梯形,侧倾机构和转向机构共用同一车身,由左、右平衡杆经球铰链联动,通过车辆转向和车身侧倾双自由度运动,实现了车辆转向与车身侧倾独立控制,车辆行驶过程中可以实现转向侧倾、独立侧倾或独立转向三种工况;应用于车辆转向时车身主动侧倾,以便车辆在过弯时或者驶过倾斜