
可调式无轨悬吊牵引车及其运作方法.pdf

努力****爱静

1/10

2/10
3/10
4/10

5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
可调式无轨悬吊牵引车及其运作方法.pdf
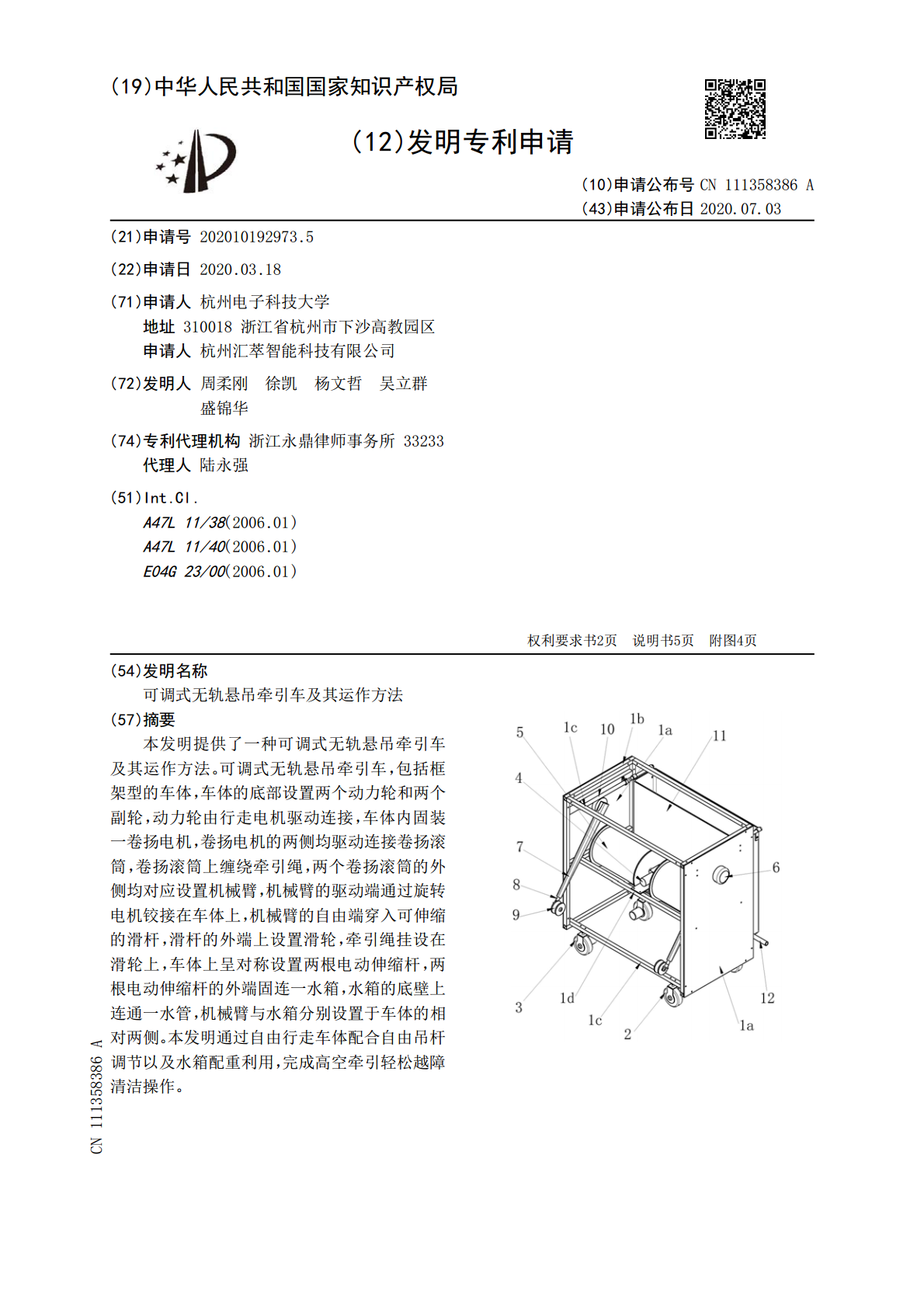
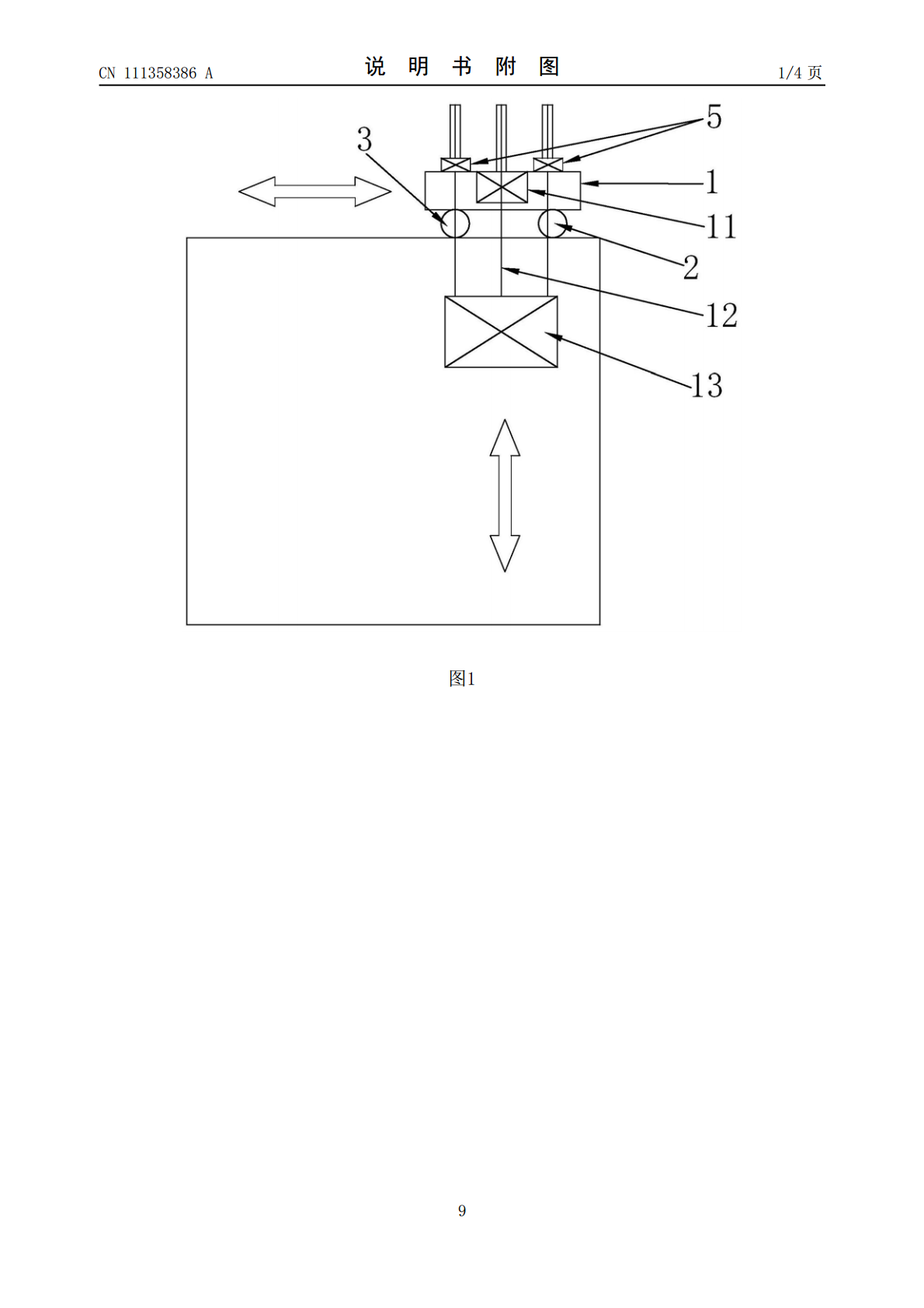
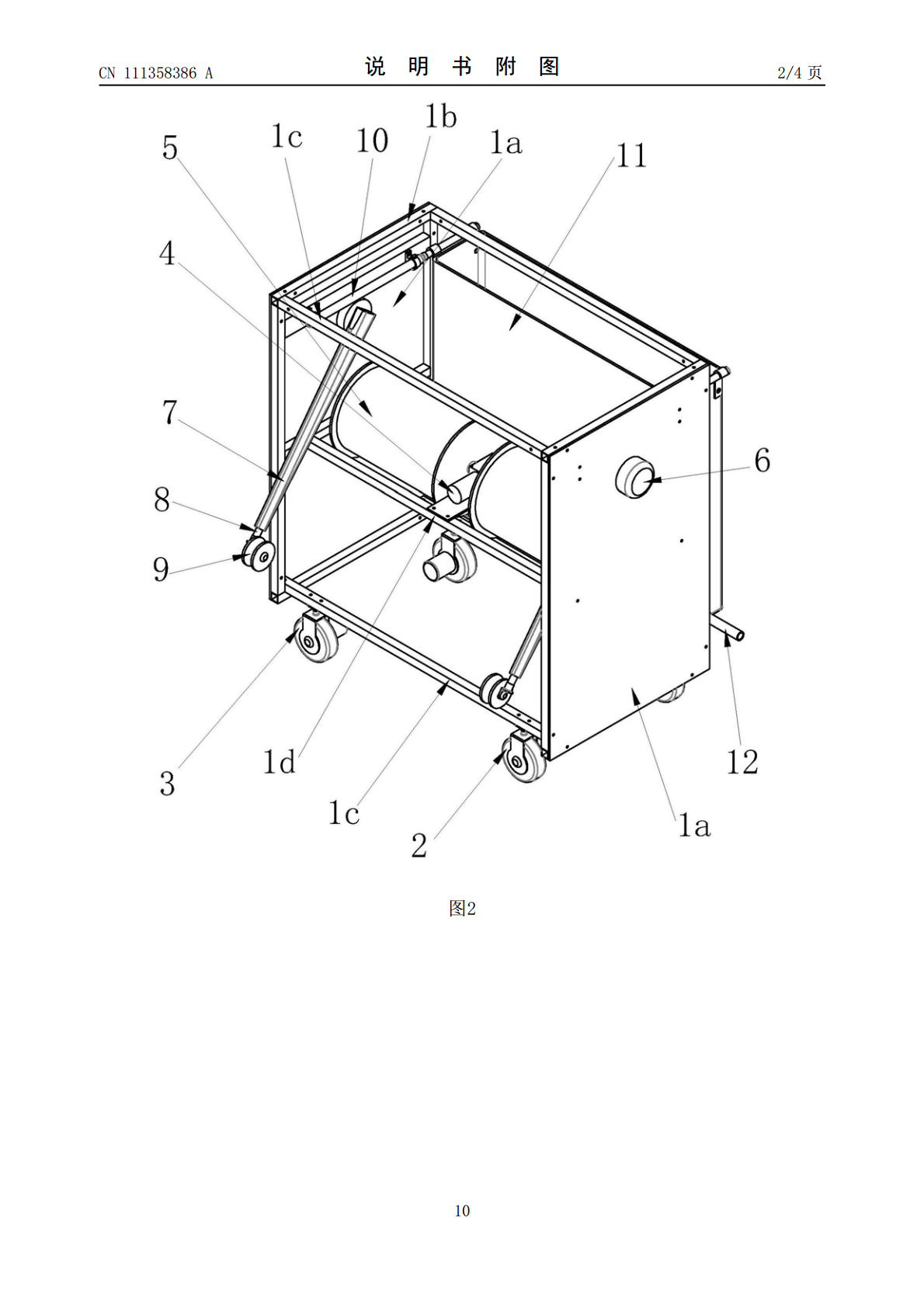
本发明提供了一种可调式无轨悬吊牵引车及其运作方法。可调式无轨悬吊牵引车,包括框架型的车体,车体的底部设置两个动力轮和两个副轮,动力轮由行走电机驱动连接,车体内固装一卷扬电机,卷扬电机的两侧均驱动连接卷扬滚筒,卷扬滚筒上缠绕牵引绳,两个卷扬滚筒的外侧均对应设置机械臂,机械臂的驱动端通过旋转电机铰接在车体上,机械臂的自由端穿入可伸缩的滑杆,滑杆的外端上设置滑轮,牵引绳挂设在滑轮上,车体上呈对称设置两根电动伸缩杆,两根电动伸缩杆的外端固连一水箱,水箱的底壁上连通一水管,机械臂与水箱分别设置于车体的相对两侧。本发
可悬吊重物的大板梁及其构筑方法.pdf
本发明公开了一种可悬吊重物的大板梁,可用于锅炉钢架中,大板梁的高度达6-9米范围,该可悬吊重物的大板梁,其截面包括一个∏型截面和两个I字型截面,所述两个I字型截面位于所述∏型截面下方两端,所述∏型截面和两个I字型截面之间的叠合面采用高强螺栓连接,所述∏型截面的顶部设有用于吊挂重物的通孔。本发明还公开了一种可悬吊重物的大板梁的构筑方法。本发明可以使得大板梁的构件尺寸大大减小,从而满足运输要求,同时可以避免在吊装安装过程中出现不安全因素。所述∏型截面的顶部设有用于吊挂重物的通孔,因此,相比现有的采用工字形截面
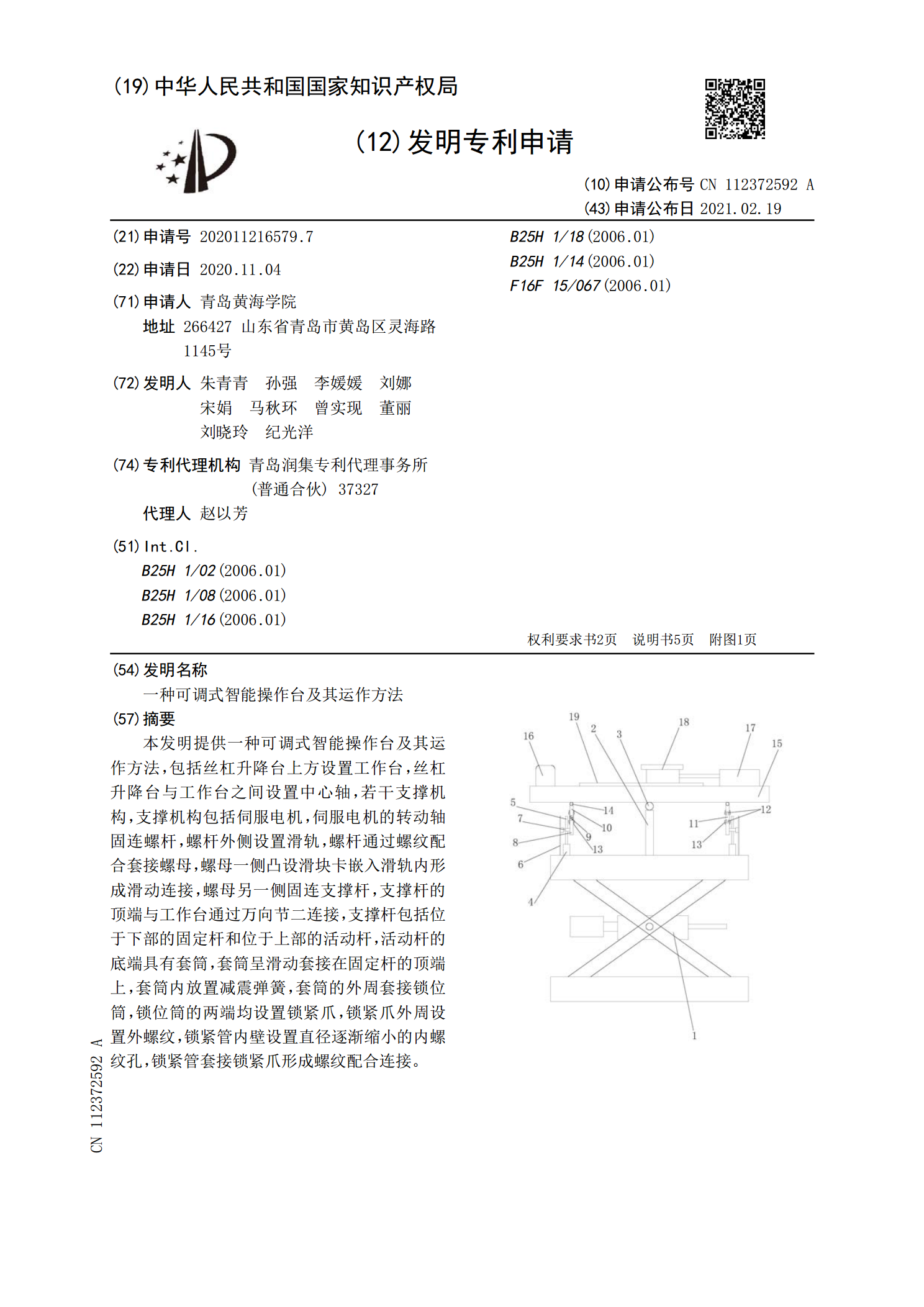
一种可调式智能操作台及其运作方法.pdf
本发明提供一种可调式智能操作台及其运作方法,包括丝杠升降台上方设置工作台,丝杠升降台与工作台之间设置中心轴,若干支撑机构,支撑机构包括伺服电机,伺服电机的转动轴固连螺杆,螺杆外侧设置滑轨,螺杆通过螺纹配合套接螺母,螺母一侧凸设滑块卡嵌入滑轨内形成滑动连接,螺母另一侧固连支撑杆,支撑杆的顶端与工作台通过万向节二连接,支撑杆包括位于下部的固定杆和位于上部的活动杆,活动杆的底端具有套筒,套筒呈滑动套接在固定杆的顶端上,套筒内放置减震弹簧,套筒的外周套接锁位筒,锁位筒的两端均设置锁紧爪,锁紧爪外周设置外螺纹,锁紧

一种可调式儿童股骨骨折悬吊牵引系统及控制方法.pdf
本发明属于骨折悬吊牵引装置技术领域,公开了一种可调式儿童股骨骨折悬吊牵引系统及控制方法,底板床两侧通过螺栓固定有支撑柱,所述支撑柱内部中空,内侧通过金属弹簧插销套接固定有支架,所述支架上活动设置有两组滑轮组件,所述滑轮组件下侧通过吊索连接有脚板,所述脚板下侧设置有空气压力悬吊装置。底板床设置有矩形木板,所述矩形木板上侧设置有软床垫,所述软床垫外围设置有金属框,床垫两侧设置有护栏,所述床垫中部上侧设置有髂骨束带。本发明结构简单合理,能够通过脚板和空气压力悬吊装置实现多角度牵引,能够可控的纠正旋转畸形和侧方成
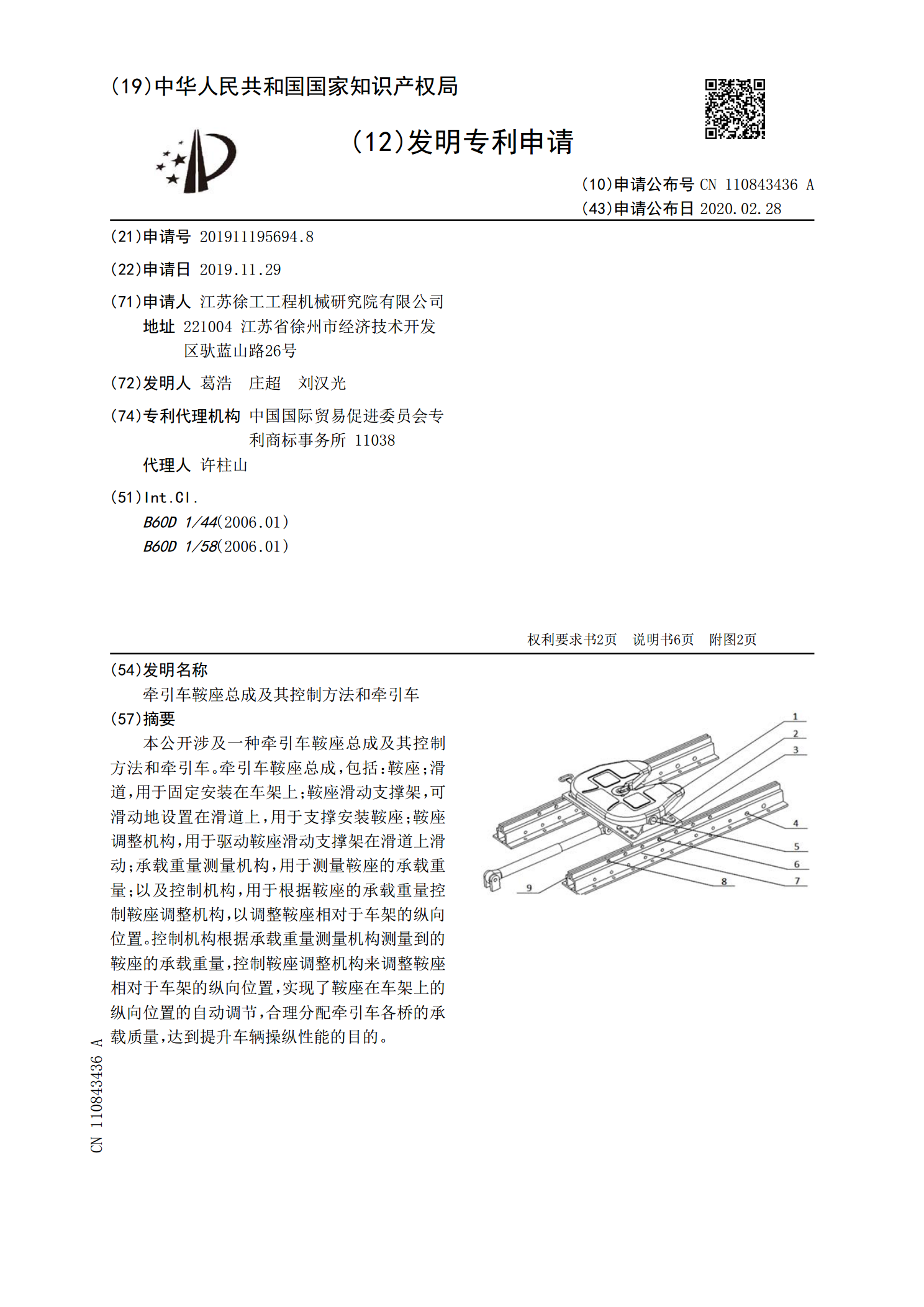
牵引车鞍座总成及其控制方法和牵引车.pdf
本公开涉及一种牵引车鞍座总成及其控制方法和牵引车。牵引车鞍座总成,包括:鞍座;滑道,用于固定安装在车架上;鞍座滑动支撑架,可滑动地设置在滑道上,用于支撑安装鞍座;鞍座调整机构,用于驱动鞍座滑动支撑架在滑道上滑动;承载重量测量机构,用于测量鞍座的承载重量;以及控制机构,用于根据鞍座的承载重量控制鞍座调整机构,以调整鞍座相对于车架的纵向位置。控制机构根据承载重量测量机构测量到的鞍座的承载重量,控制鞍座调整机构来调整鞍座相对于车架的纵向位置,实现了鞍座在车架上的纵向位置的自动调节,合理分配牵引车各桥的承载质量,