
一种用于机器人全驱动手指气动肌肉的张紧结构.pdf

Ma****57

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于机器人全驱动手指气动肌肉的张紧结构.pdf
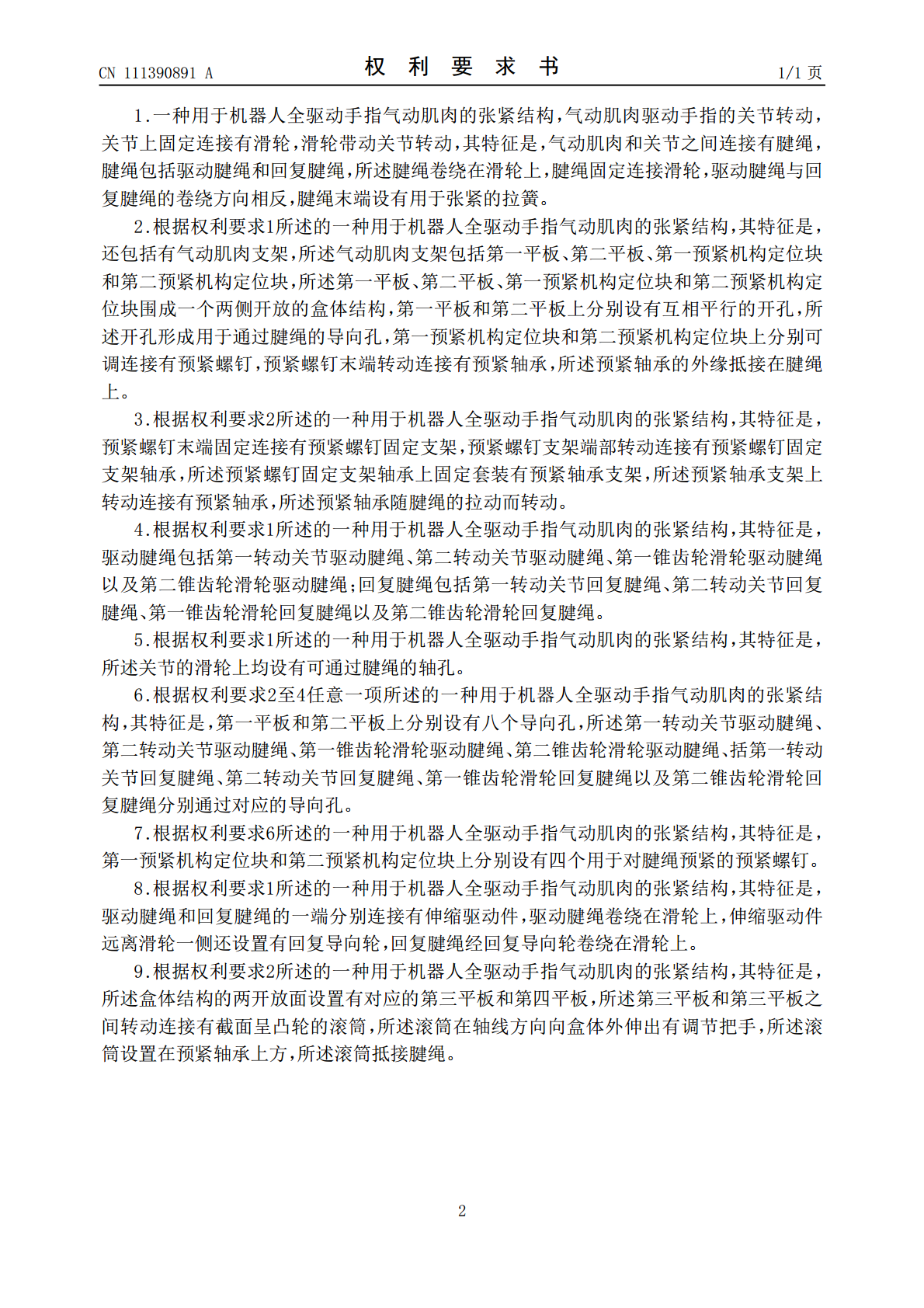
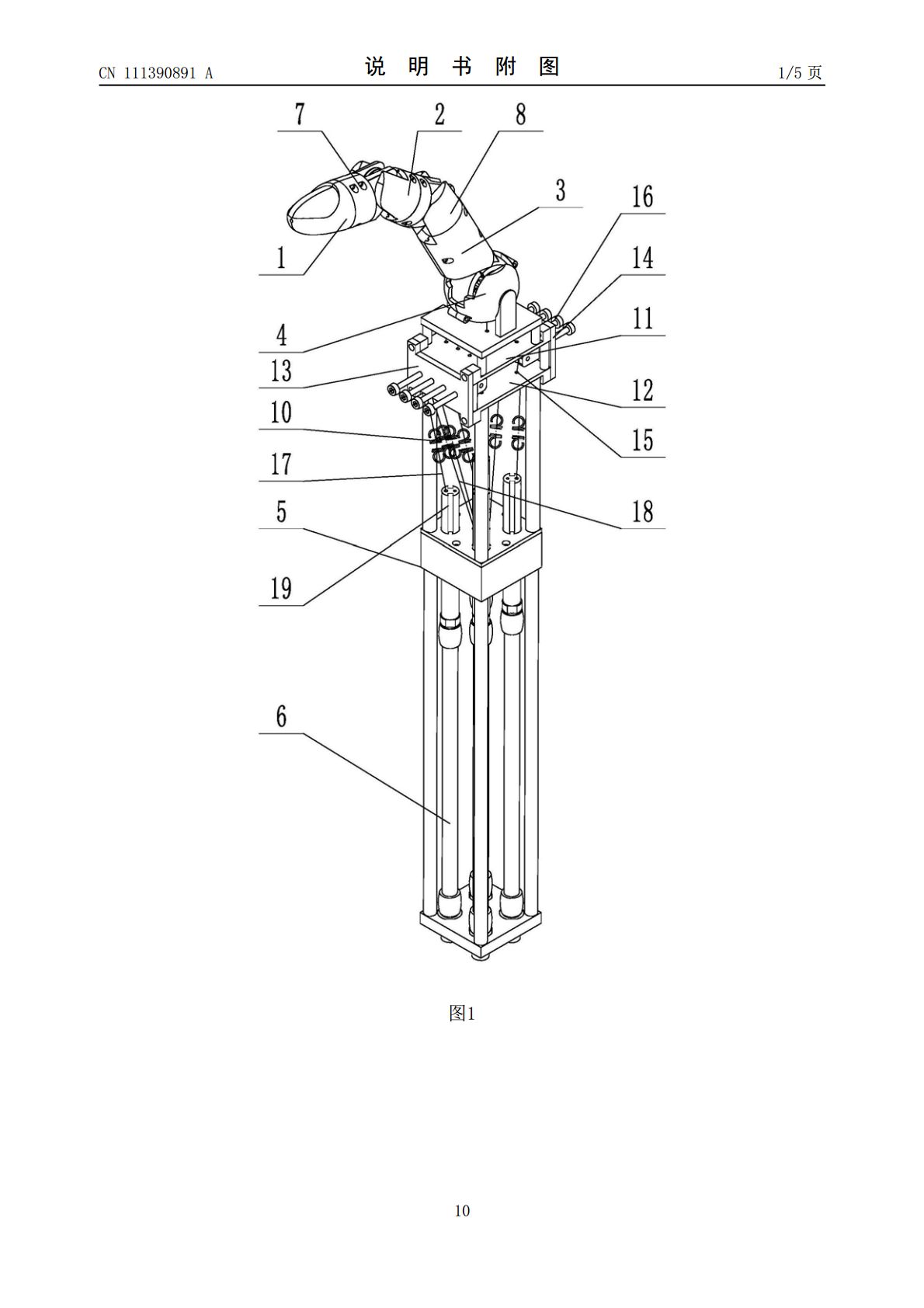
本发明公开了一种用于机器人全驱动手指气动肌肉的张紧结构,旨在解决现在的欠驱动手的腱绳容易产生形变,造成驱动死区,减少机械手的工作空间以及增加其精确控制的不足。该发明包括驱动腱绳和回复腱绳,所述腱绳呈“8”字形卷绕在滑轮上,腱绳固定连接滑轮,驱动腱绳与回复腱绳的卷绕方向相反,腱绳末端设有用于张紧的拉簧。能对传动的腱绳进行及时的张紧,尽可能长的保证机械手的工作空间、减小其精确控制的难度。
一种气动肌肉驱动的Delta机器人.pdf
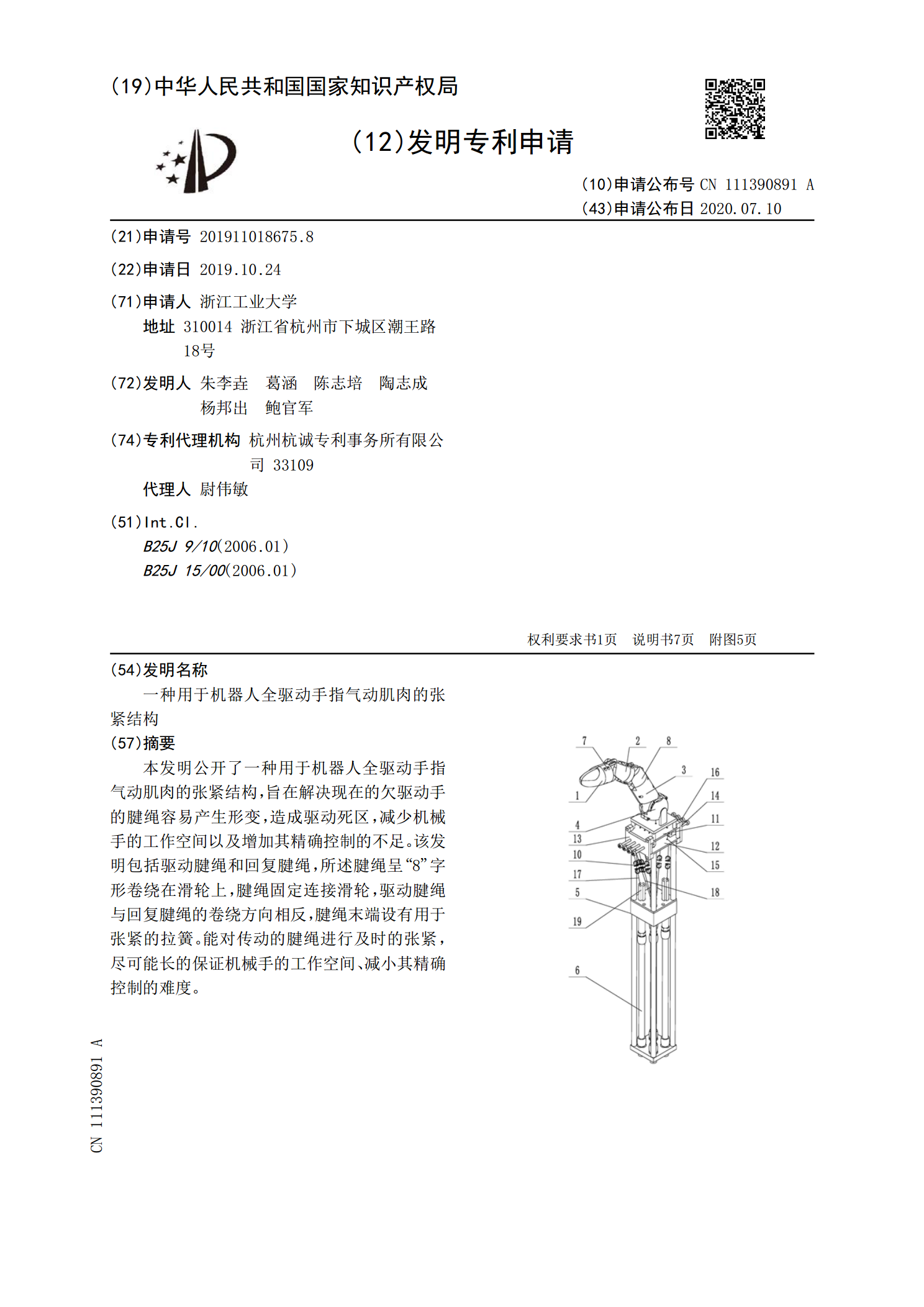
本发明属于机器人结构设计技术领域,一种气动肌肉驱动的Delta机器人,包括静平台、支架、动平台、支链结构、气动驱动装置、中转机构和安全制动装置。所述支架固定在静平台下表面,气动驱动装置与安全制动装置固定在支架上。气动驱动装置通过链条与链轮配合,链轮与安全制动装置的传动轴通过键连接,安全制动装置制动链轮,使气动驱动装置停止。支链结构一端与气动驱动装置连接,另一端与动平台连接。静平台通过中转机构与动平台连接,实现Delta机器人的旋转。采用气动肌肉代替电机作为Delta机器人的驱动元件,可大大降低成本,具有结
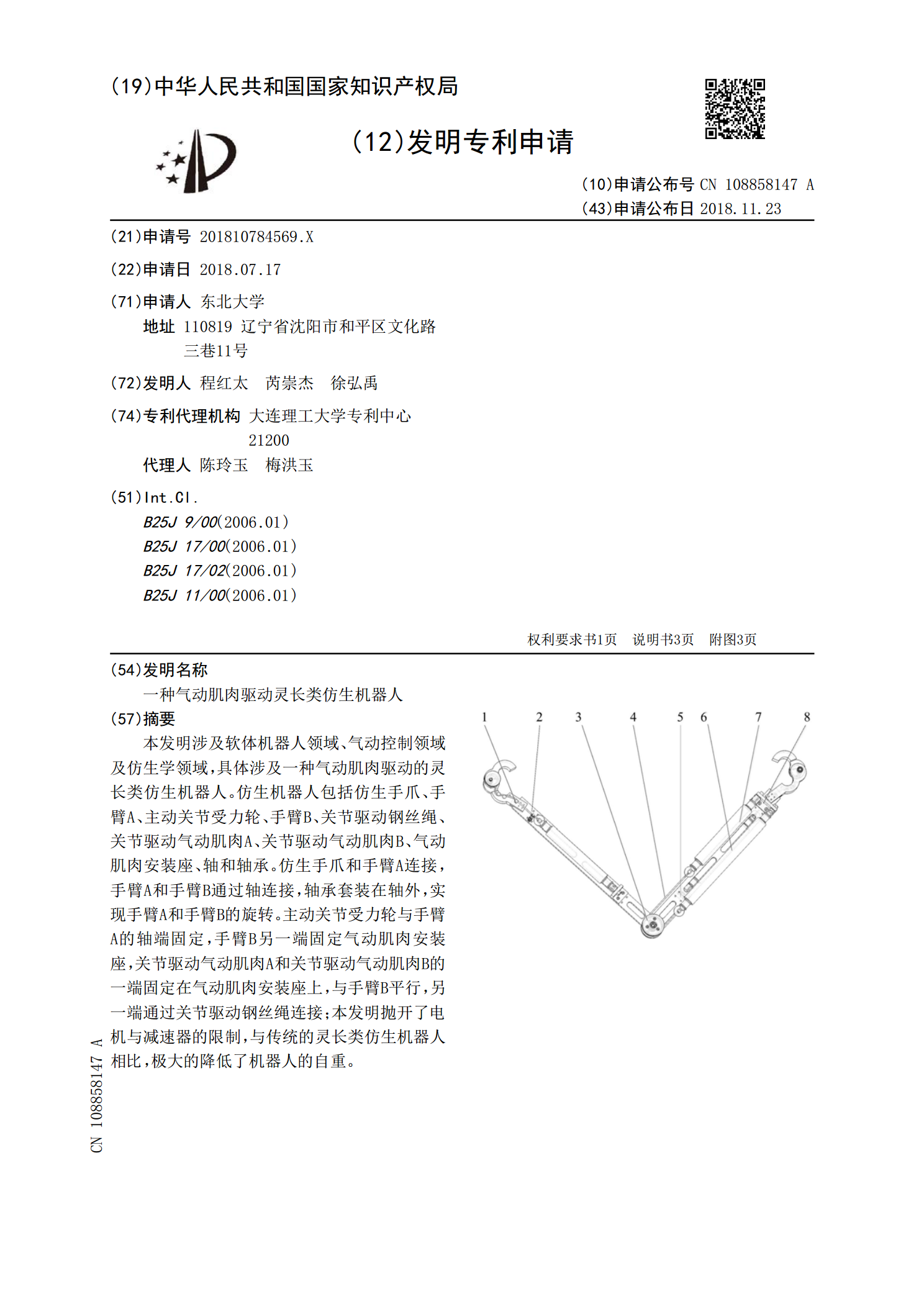
一种气动肌肉驱动灵长类仿生机器人.pdf
本发明涉及软体机器人领域、气动控制领域及仿生学领域,具体涉及一种气动肌肉驱动的灵长类仿生机器人。仿生机器人包括仿生手爪、手臂A、主动关节受力轮、手臂B、关节驱动钢丝绳、关节驱动气动肌肉A、关节驱动气动肌肉B、气动肌肉安装座、轴和轴承。仿生手爪和手臂A连接,手臂A和手臂B通过轴连接,轴承套装在轴外,实现手臂A和手臂B的旋转。主动关节受力轮与手臂A的轴端固定,手臂B另一端固定气动肌肉安装座,关节驱动气动肌肉A和关节驱动气动肌肉B的一端固定在气动肌肉安装座上,与手臂B平行,另一端通过关节驱动钢丝绳连接;本发明抛
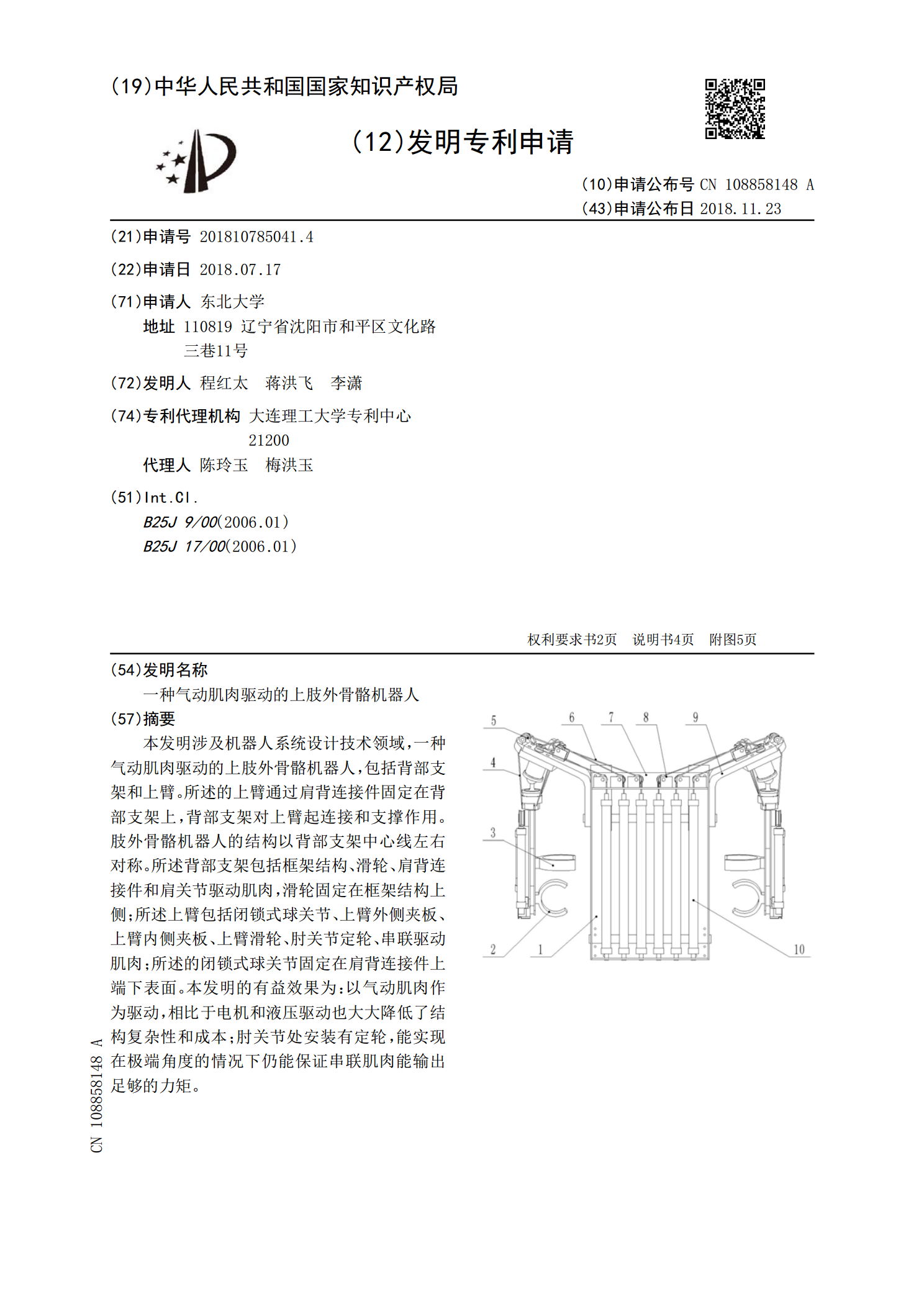
一种气动肌肉驱动的上肢外骨骼机器人.pdf
本发明涉及机器人系统设计技术领域,一种气动肌肉驱动的上肢外骨骼机器人,包括背部支架和上臂。所述的上臂通过肩背连接件固定在背部支架上,背部支架对上臂起连接和支撑作用。肢外骨骼机器人的结构以背部支架中心线左右对称。所述背部支架包括框架结构、滑轮、肩背连接件和肩关节驱动肌肉,滑轮固定在框架结构上侧;所述上臂包括闭锁式球关节、上臂外侧夹板、上臂内侧夹板、上臂滑轮、肘关节定轮、串联驱动肌肉;所述的闭锁式球关节固定在肩背连接件上端下表面。本发明的有益效果为:以气动肌肉作为驱动,相比于电机和液压驱动也大大降低了结构复杂
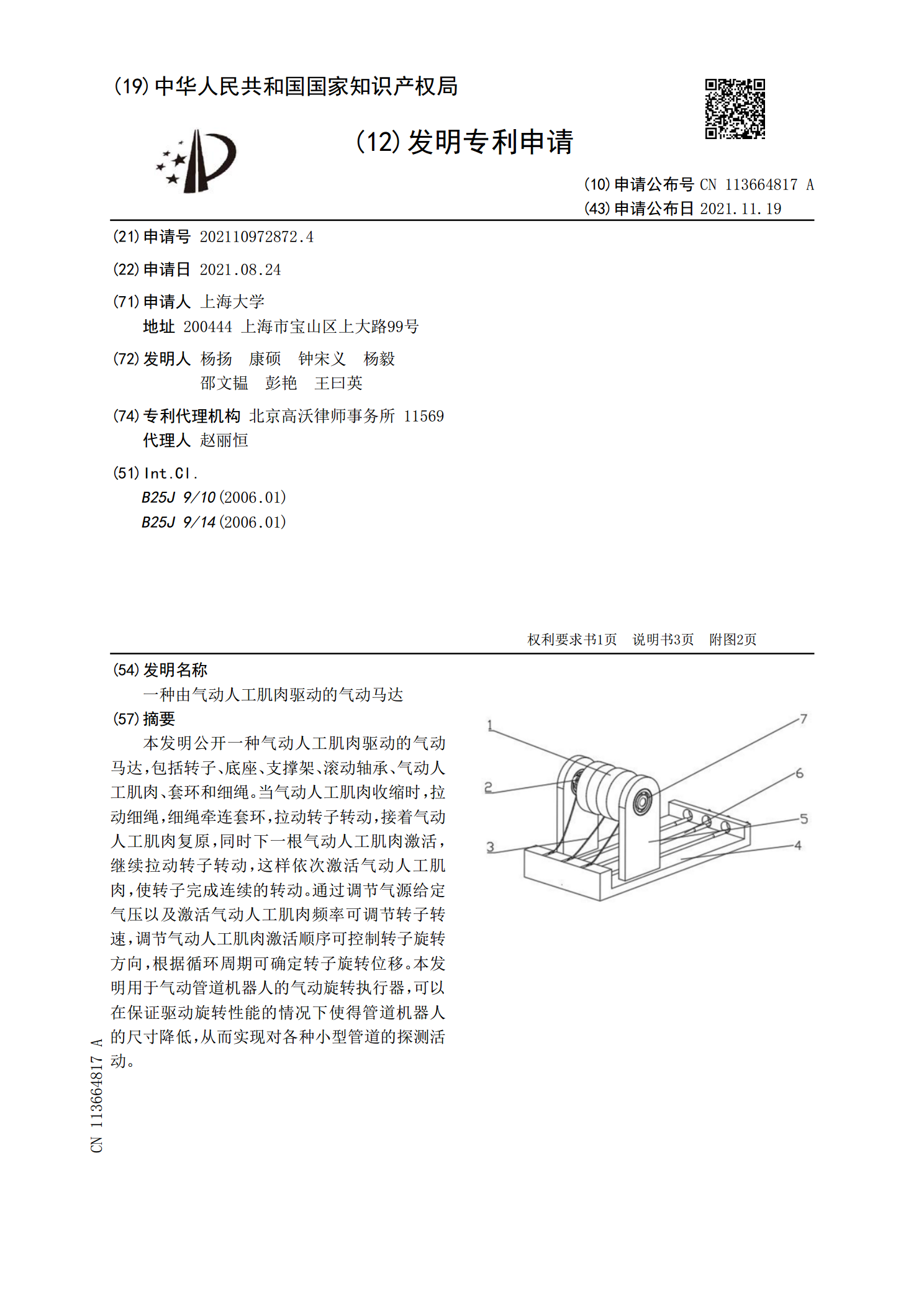
一种由气动人工肌肉驱动的气动马达.pdf
本发明公开一种气动人工肌肉驱动的气动马达,包括转子、底座、支撑架、滚动轴承、气动人工肌肉、套环和细绳。当气动人工肌肉收缩时,拉动细绳,细绳牵连套环,拉动转子转动,接着气动人工肌肉复原,同时下一根气动人工肌肉激活,继续拉动转子转动,这样依次激活气动人工肌肉,使转子完成连续的转动。通过调节气源给定气压以及激活气动人工肌肉频率可调节转子转速,调节气动人工肌肉激活顺序可控制转子旋转方向,根据循环周期可确定转子旋转位移。本发明用于气动管道机器人的气动旋转执行器,可以在保证驱动旋转性能的情况下使得管道机器人的尺寸降低