
基于轮定位仪将校准装置对准车辆的方法.pdf

绮兰****文章

1/10

2/10

3/10
4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于轮定位仪将校准装置对准车辆的方法.pdf
本发明公开了一种基于轮定位仪将校准装置对准车辆的方法。轮定位仪包括第一图像传感器和计算机,校准装置包括第二图像传感器。所述方法包括:计算机控制第一图像传感器对车辆上的车载目标进行成像,并对得到的图像进行处理,以确定车辆的位置;计算机控制第一图像传感器和第二图像传感器对参考目标进行成像,并对得到的图像进行处理,确定校准装置的位置,校准装置与车辆的位置处于同一坐标系,参考目标被放置于车辆附近,且参考目标在第一图像传感器与第二图像传感器的视野范围内;计算机根据校准装置与车辆的位置关系,确定校准装置的调节方式,以
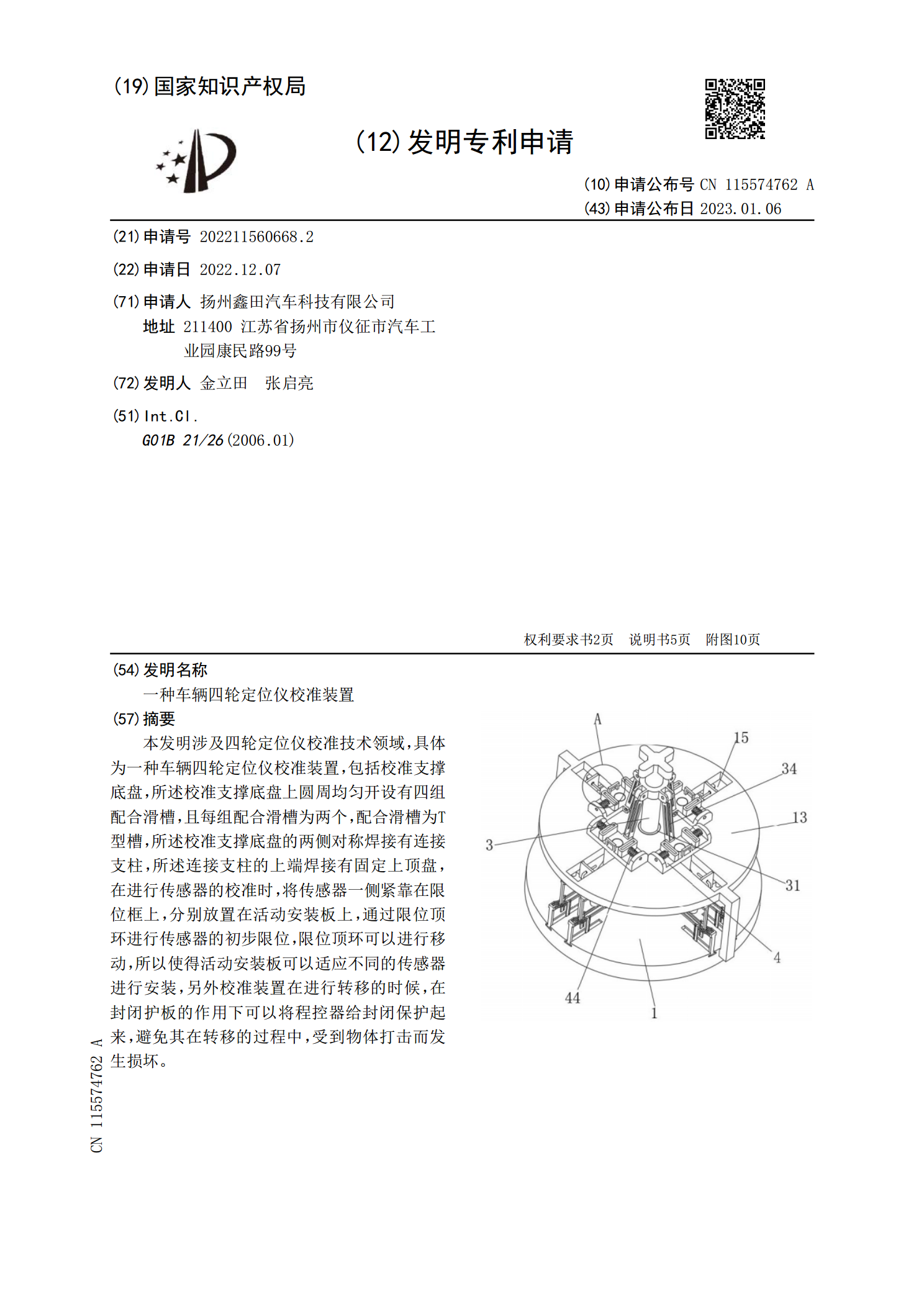
一种车辆四轮定位仪校准装置.pdf
本发明涉及四轮定位仪校准技术领域,具体为一种车辆四轮定位仪校准装置,包括校准支撑底盘,所述校准支撑底盘上圆周均匀开设有四组配合滑槽,且每组配合滑槽为两个,配合滑槽为T型槽,所述校准支撑底盘的两侧对称焊接有连接支柱,所述连接支柱的上端焊接有固定上顶盘,在进行传感器的校准时,将传感器一侧紧靠在限位框上,分别放置在活动安装板上,通过限位顶环进行传感器的初步限位,限位顶环可以进行移动,所以使得活动安装板可以适应不同的传感器进行安装,另外校准装置在进行转移的时候,在封闭护板的作用下可以将程控器给封闭保护起来,避免其
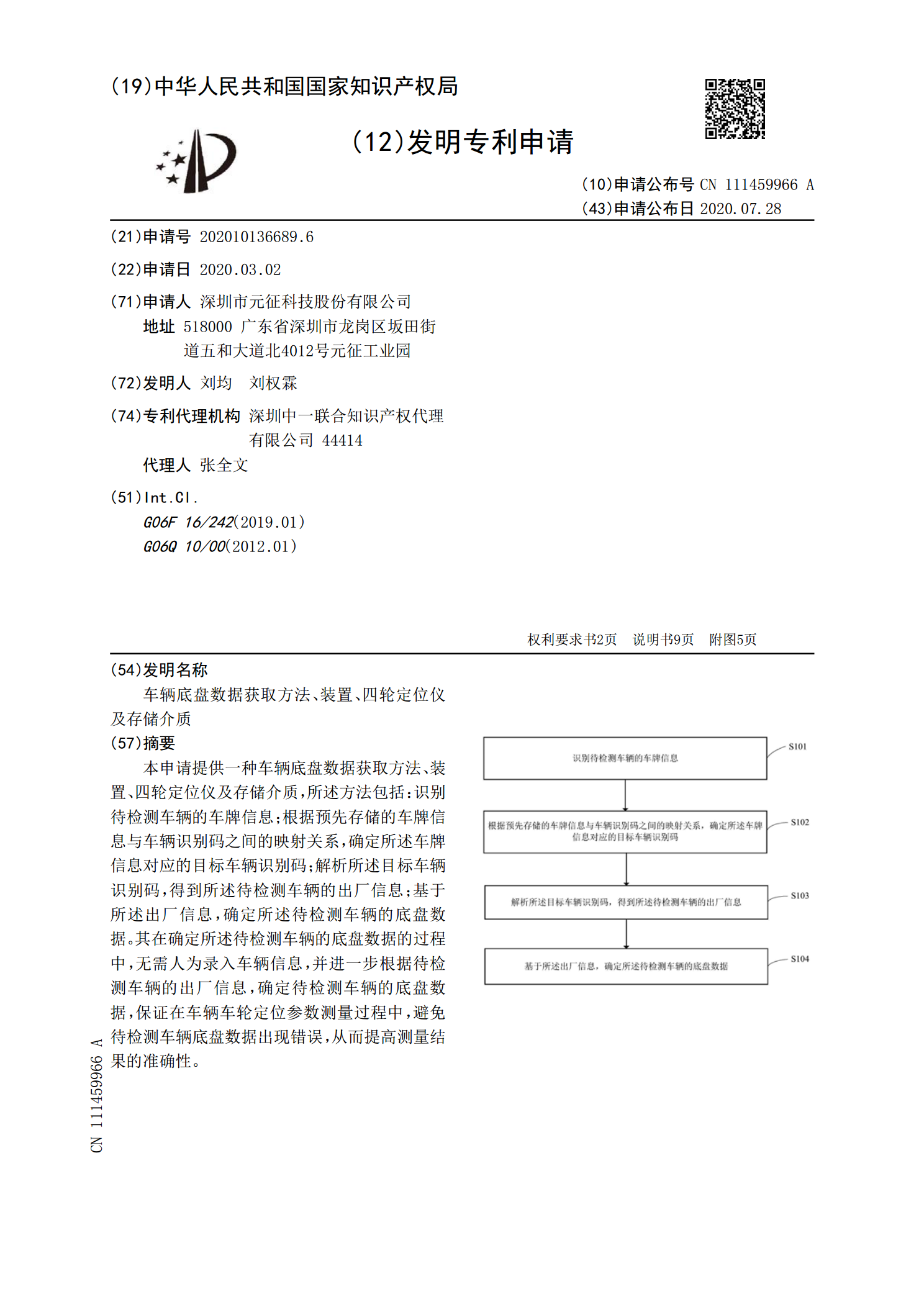
车辆底盘数据获取方法、装置、四轮定位仪及存储介质.pdf
本申请提供一种车辆底盘数据获取方法、装置、四轮定位仪及存储介质,所述方法包括:识别待检测车辆的车牌信息;根据预先存储的车牌信息与车辆识别码之间的映射关系,确定所述车牌信息对应的目标车辆识别码;解析所述目标车辆识别码,得到所述待检测车辆的出厂信息;基于所述出厂信息,确定所述待检测车辆的底盘数据。其在确定所述待检测车辆的底盘数据的过程中,无需人为录入车辆信息,并进一步根据待检测车辆的出厂信息,确定待检测车辆的底盘数据,保证在车辆车轮定位参数测量过程中,避免待检测车辆底盘数据出现错误,从而提高测量结果的准确性。
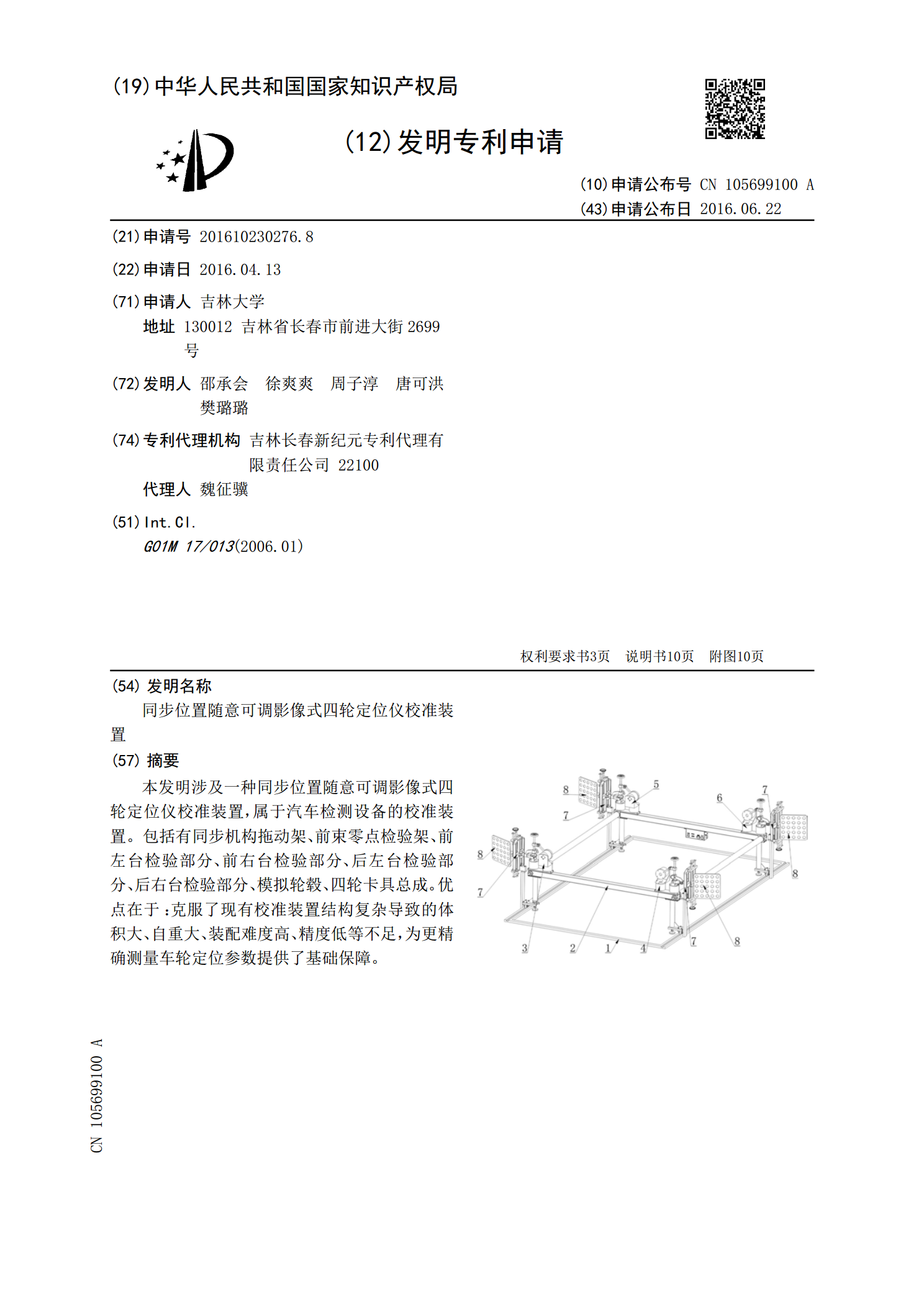
同步位置随意可调影像式四轮定位仪校准装置.pdf
本发明涉及一种同步位置随意可调影像式四轮定位仪校准装置,属于汽车检测设备的校准装置。包括有同步机构拖动架、前束零点检验架、前左台检验部分、前右台检验部分、后左台检验部分、后右台检验部分、模拟轮毂、四轮卡具总成。优点在于:克服了现有校准装置结构复杂导致的体积大、自重大、装配难度高、精度低等不足,为更精确测量车轮定位参数提供了基础保障。

车辆对准及传感器校准系统.pdf
一种用于将目标(32)或光传感器(40)与车辆(24)对准以对车辆(24)上的传感器(34)进行校准或对车辆上的灯(114)的对准进行校准的系统和方法,包括用于确定车辆(24)取向的多个非接触式车轮对准传感器(28)。一种目标调整框架(26),包括以可移动的方式安装在基部框架(60)上的目标安装件(90)和被配置成使目标安装件(90)相对于基部框架(60)选择性地移动的多个致动器(74,80,88,94),其中基部框架(60)处于已知取向。一种计算机系统,选择性地致动致动器,以相对于车辆(24)定位目标(