
一种智能坐便机器人.pdf

宏硕****mo

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能坐便机器人.pdf
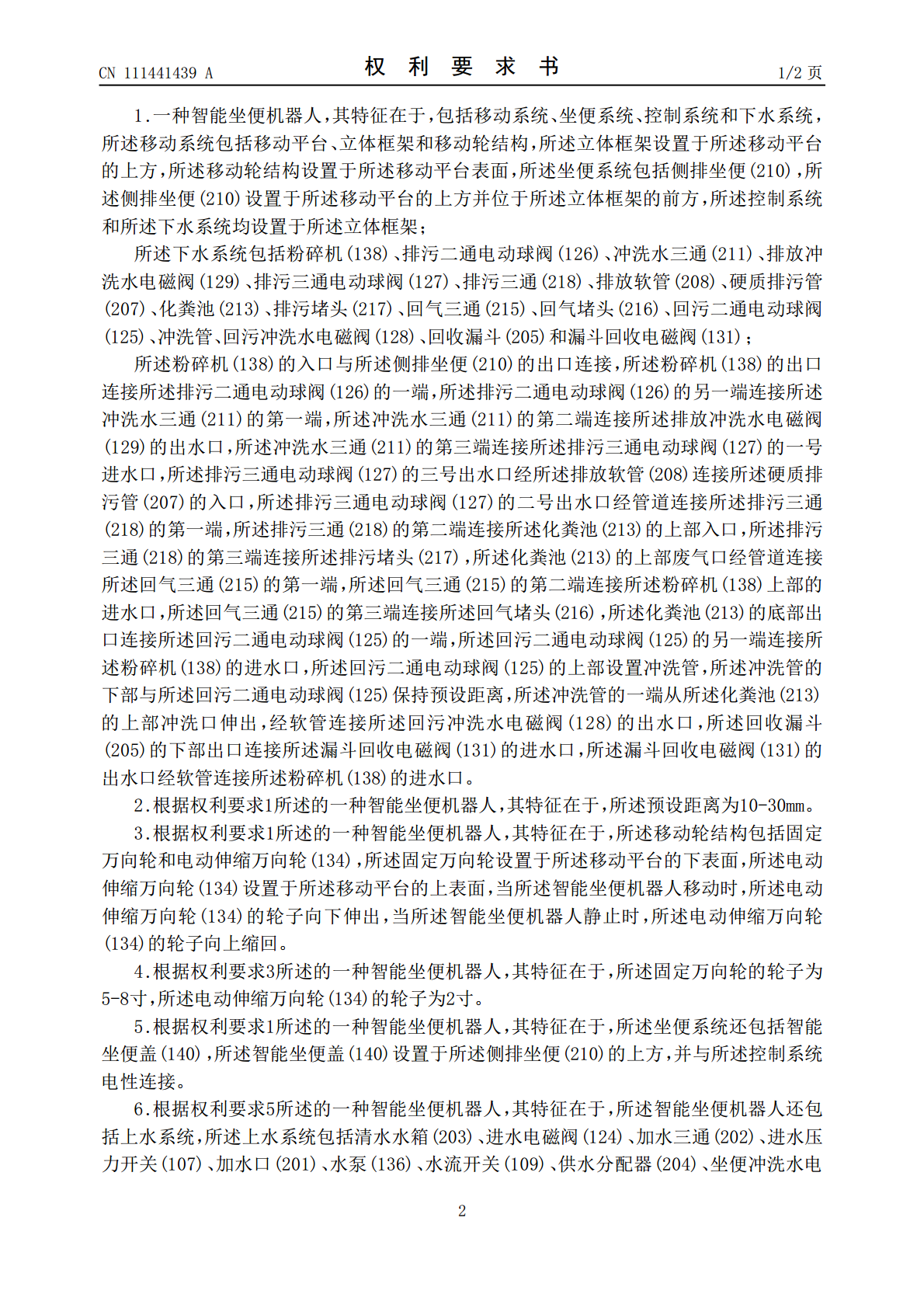
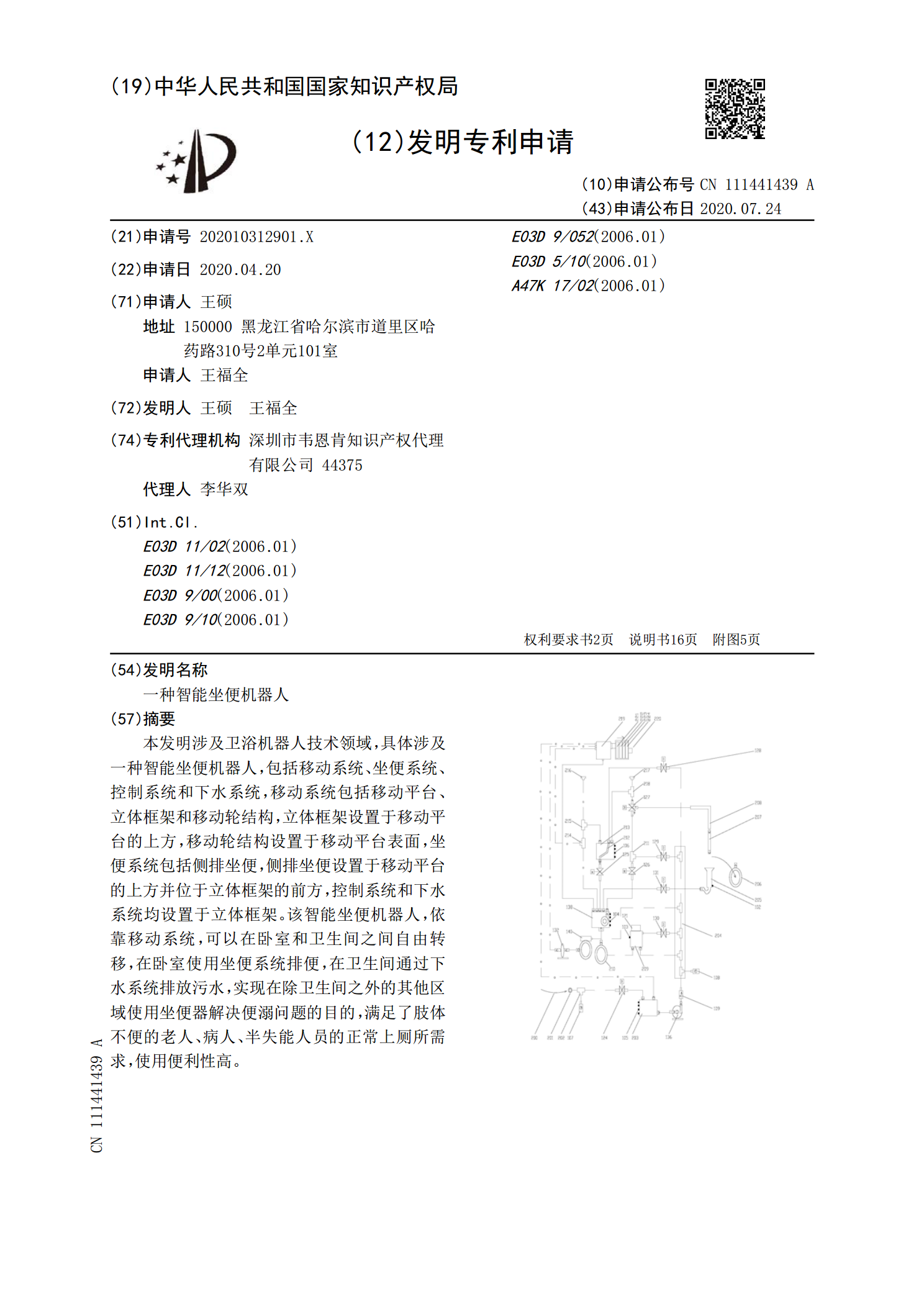
本发明涉及卫浴机器人技术领域,具体涉及一种智能坐便机器人,包括移动系统、坐便系统、控制系统和下水系统,移动系统包括移动平台、立体框架和移动轮结构,立体框架设置于移动平台的上方,移动轮结构设置于移动平台表面,坐便系统包括侧排坐便,侧排坐便设置于移动平台的上方并位于立体框架的前方,控制系统和下水系统均设置于立体框架。该智能坐便机器人,依靠移动系统,可以在卧室和卫生间之间自由转移,在卧室使用坐便系统排便,在卫生间通过下水系统排放污水,实现在除卫生间之外的其他区域使用坐便器解决便溺问题的目的,满足了肢体不便的老人
一种多功能智能坐便床.pdf
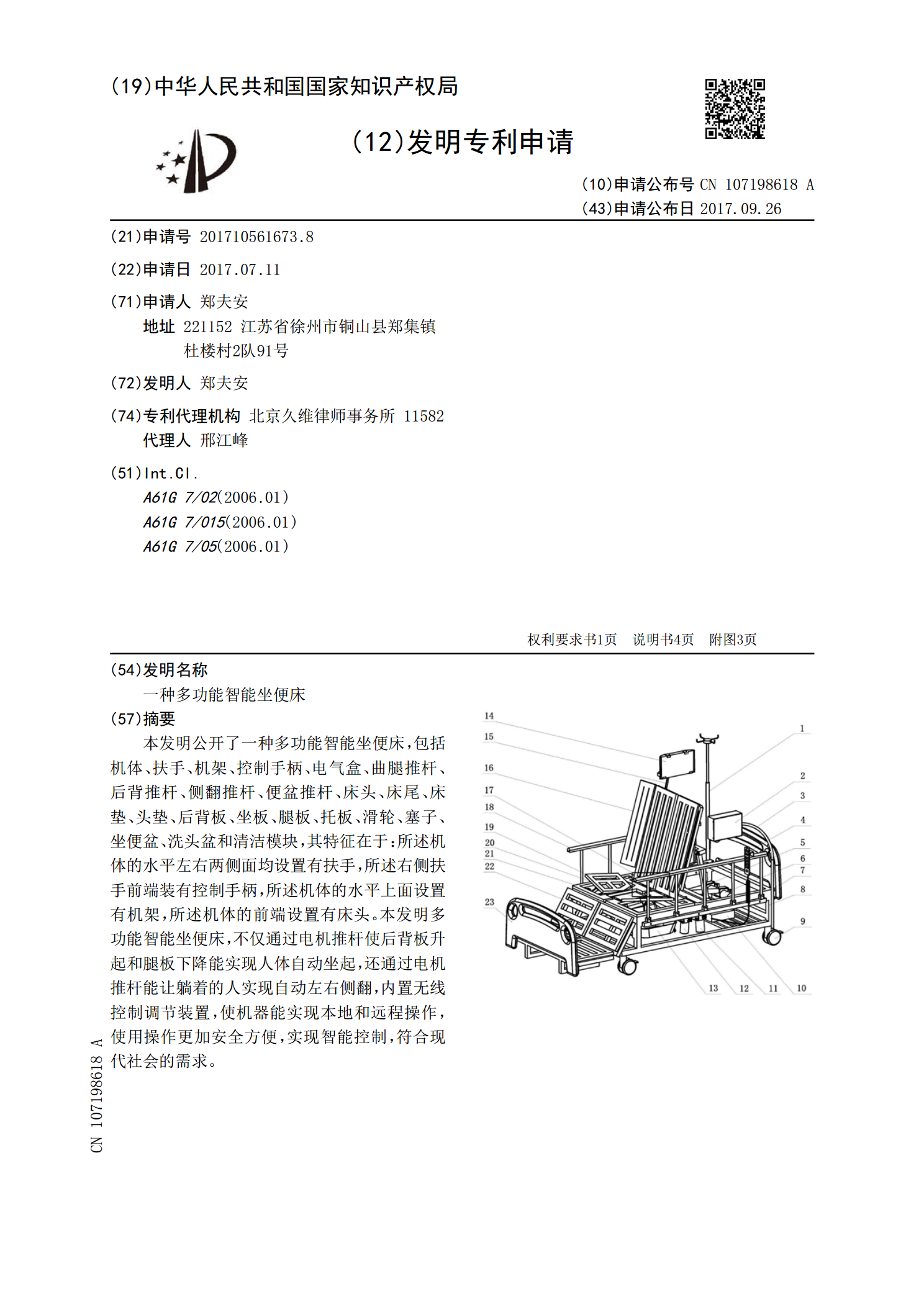
本发明公开了一种多功能智能坐便床,包括机体、扶手、机架、控制手柄、电气盒、曲腿推杆、后背推杆、侧翻推杆、便盆推杆、床头、床尾、床垫、头垫、后背板、坐板、腿板、托板、滑轮、塞子、坐便盆、洗头盆和清洁模块,其特征在于:所述机体的水平左右两侧面均设置有扶手,所述右侧扶手前端装有控制手柄,所述机体的水平上面设置有机架,所述机体的前端设置有床头。本发明多功能智能坐便床,不仅通过电机推杆使后背板升起和腿板下降能实现人体自动坐起,还通过电机推杆能让躺着的人实现自动左右侧翻,内置无线控制调节装置,使机器能实现本地和远程操
一种坐便构造.pdf
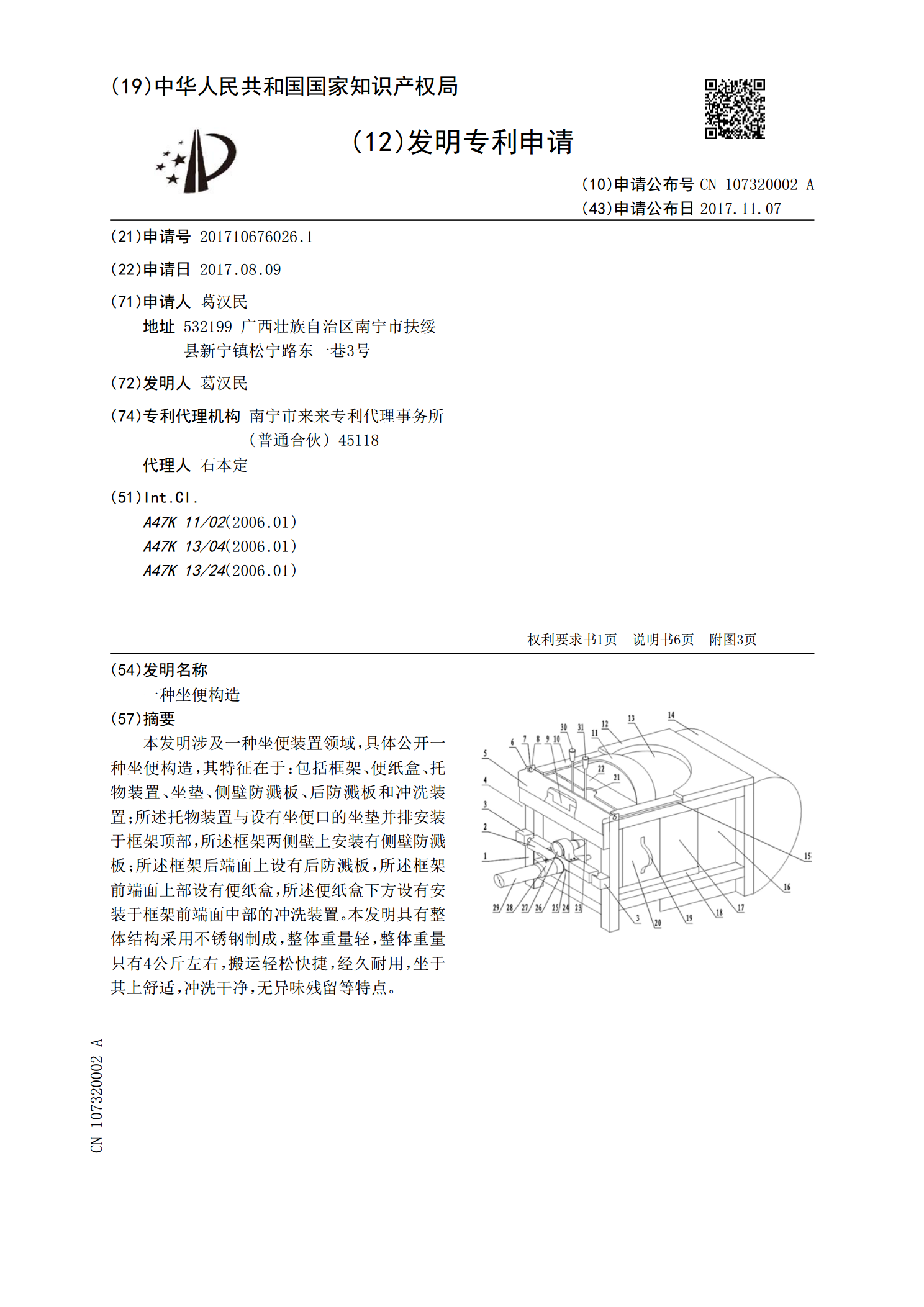
本发明涉及一种坐便装置领域,具体公开一种坐便构造,其特征在于:包括框架、便纸盒、托物装置、坐垫、侧壁防溅板、后防溅板和冲洗装置;所述托物装置与设有坐便口的坐垫并排安装于框架顶部,所述框架两侧壁上安装有侧壁防溅板;所述框架后端面上设有后防溅板,所述框架前端面上部设有便纸盒,所述便纸盒下方设有安装于框架前端面中部的冲洗装置。本发明具有整体结构采用不锈钢制成,整体重量轻,整体重量只有4公斤左右,搬运轻松快捷,经久耐用,坐于其上舒适,冲洗干净,无异味残留等特点。

一种升降坐便椅.pdf
一种升降坐便椅。提供了一种高度可调且便盆隐藏的升降坐便椅。由下至上依次包括底座、支座和椅座,所述椅座中间设有放置便盆的开口,所述支座包括由塑料制成的可压缩的下部和不可压缩的上部,所述下部的侧壁呈锯齿形状,所述上部和下部均为中空结构,两者之间通过水平的支撑板隔开,所述坐便椅通过可压缩的下部实现升降。本发明将中空的支座分为不可压缩的上部和可压缩的下部,上部留有足够的便盆容置空间,用来放置便盆,在下部内设置气泵或气囊来实现本发明的升降。
一种医用坐便椅.pdf
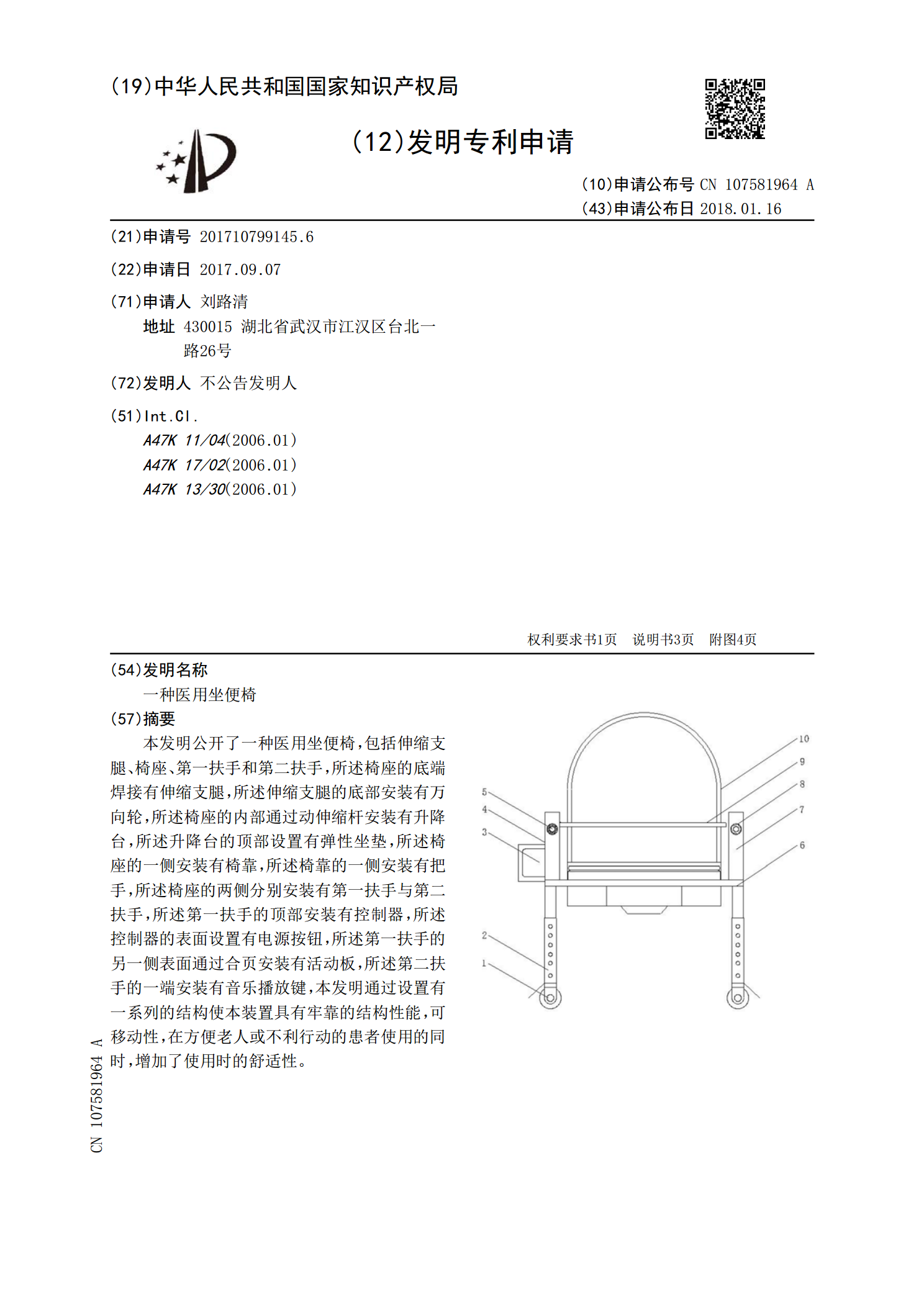
本发明公开了一种医用坐便椅,包括伸缩支腿、椅座、第一扶手和第二扶手,所述椅座的底端焊接有伸缩支腿,所述伸缩支腿的底部安装有万向轮,所述椅座的内部通过动伸缩杆安装有升降台,所述升降台的顶部设置有弹性坐垫,所述椅座的一侧安装有椅靠,所述椅靠的一侧安装有把手,所述椅座的两侧分别安装有第一扶手与第二扶手,所述第一扶手的顶部安装有控制器,所述控制器的表面设置有电源按钮,所述第一扶手的另一侧表面通过合页安装有活动板,所述第二扶手的一端安装有音乐播放键,本发明通过设置有一系列的结构使本装置具有牢靠的结构性能,可移动性,