
一种新型计量用罗茨转子型线.pdf

玉军****la

1/5

2/5
3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种新型计量用罗茨转子型线.pdf
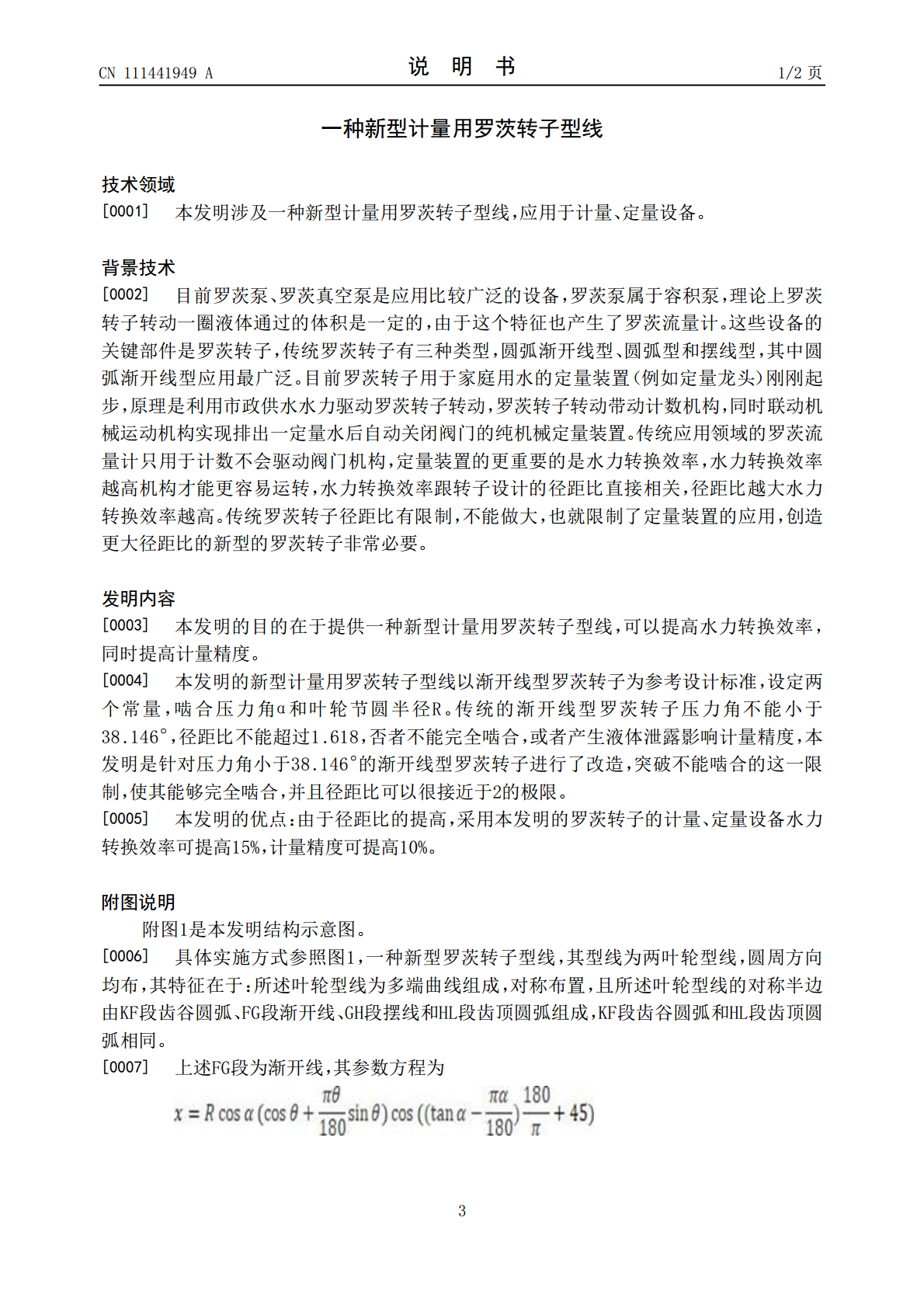
本发明涉及一种新型计量用罗茨转子型线,其型线为两叶轮型线,圆周方向均布,其特征在于:所述叶轮型线为多端曲线组成,对称布置,且所述叶轮型线的对称半边由KF段齿谷圆弧、FG段渐开线、GH段摆线和HL段齿顶圆弧组成,KF段齿谷圆弧和HL段齿顶圆弧相同。采用本发明的罗茨转子的计量、定量设备水力转换效率可提高15%,计量精度可提高10%。

一种罗茨转子型线.pdf
本发明涉及罗茨真空泵技术领域,公开了一种罗茨转子型线,其技术方案要点是转子型线由首尾依次连接的八段曲线组成,按逆时针方向依次为偏心玫瑰线A<base:Sub>1</base:Sub>A<base:Sub>2</base:Sub>,使得偏心玫瑰线A<base:Sub>1</base:Sub>A<base:Sub>2</base:Sub>与对称线A<base:Sub>1</base:Sub>A<base:Sub>8</base:Sub>之间光滑连接,解决了尖点的问题,消除了泄露三角形的问题,并且可以自主的调节

一种多叶罗茨泵转子型线.pdf
本申请属于流体机械领域,特别是涉及一种多叶罗茨泵转子型线。现有技术中的渐开线‑销齿圆弧型转子型线在中心距A与转子直径D之比(A/D)小于某一极限值时,型线设计受到限制。本申请提供了一种多叶罗茨泵转子型线,包括第一转子和第二转子,第一转子与第二转子配合使用;第一转子的型线包括依次连接的第一齿顶对滚圆弧段、第一圆弧段、第一渐开线段、第一圆弧包络线段、第一点啮合摆线段和第一齿根对滚圆弧段,所述第二转子的型线包括依次连接的第二齿顶对滚圆弧段、第二圆弧段、第二渐开线段、第二圆弧包络线段、第二点啮合摆线段和第二齿根对

一种圆弧型罗茨转子及其型线设计方法.pdf
本发明公开了一种圆弧型罗茨转子及其型线设计方法,一种圆弧型罗茨转子包括相互啮合并结构相同的左罗茨转子和右罗茨转子,所述的左罗茨转子包括左转轴和左叶轮,左叶轮的组成型线按照逆时针方向依次包括左第一叶顶圆弧A<base:Sub>1</base:Sub>B<base:Sub>1</base:Sub>、左第一叶底样条曲线B<base:Sub>1</base:Sub>C<base:Sub>1</base:Sub>、左第二叶顶圆弧C<base:Sub>1</base:Sub>D<base:Sub>1</base:Su

一种分段圆弧型罗茨转子及其型线设计方法.pdf
本发明公开了一种分段圆弧型罗茨转子及其型线设计方法,左罗茨转子(Ⅰ)与右罗茨转子(Ⅱ)完全相同,左罗茨转子(Ⅰ)的型线由12段曲线组成,包括:左第一齿根圆弧AB、左第一齿侧圆弧包络线BC、左第一齿侧圆弧CD、左第一齿顶圆弧DE、左第二齿侧圆弧EF、左第二齿侧圆弧包络线FG、左第二齿根圆弧GH、左第三齿侧圆弧包络线HI、左第三齿侧圆弧IJ、左第二齿顶圆弧JK、左第四齿侧圆弧KL和左第四齿侧圆弧包络线LA,任意两条相邻曲线之间光滑连接;两个相同的转子在做同步异向双回转运动的过程中能够实现完全正确的啮合,保证了