
一种基于机器视觉的螺纹参数检测方法.pdf

文光****iu

1/10

2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于机器视觉的螺纹参数检测方法.pdf
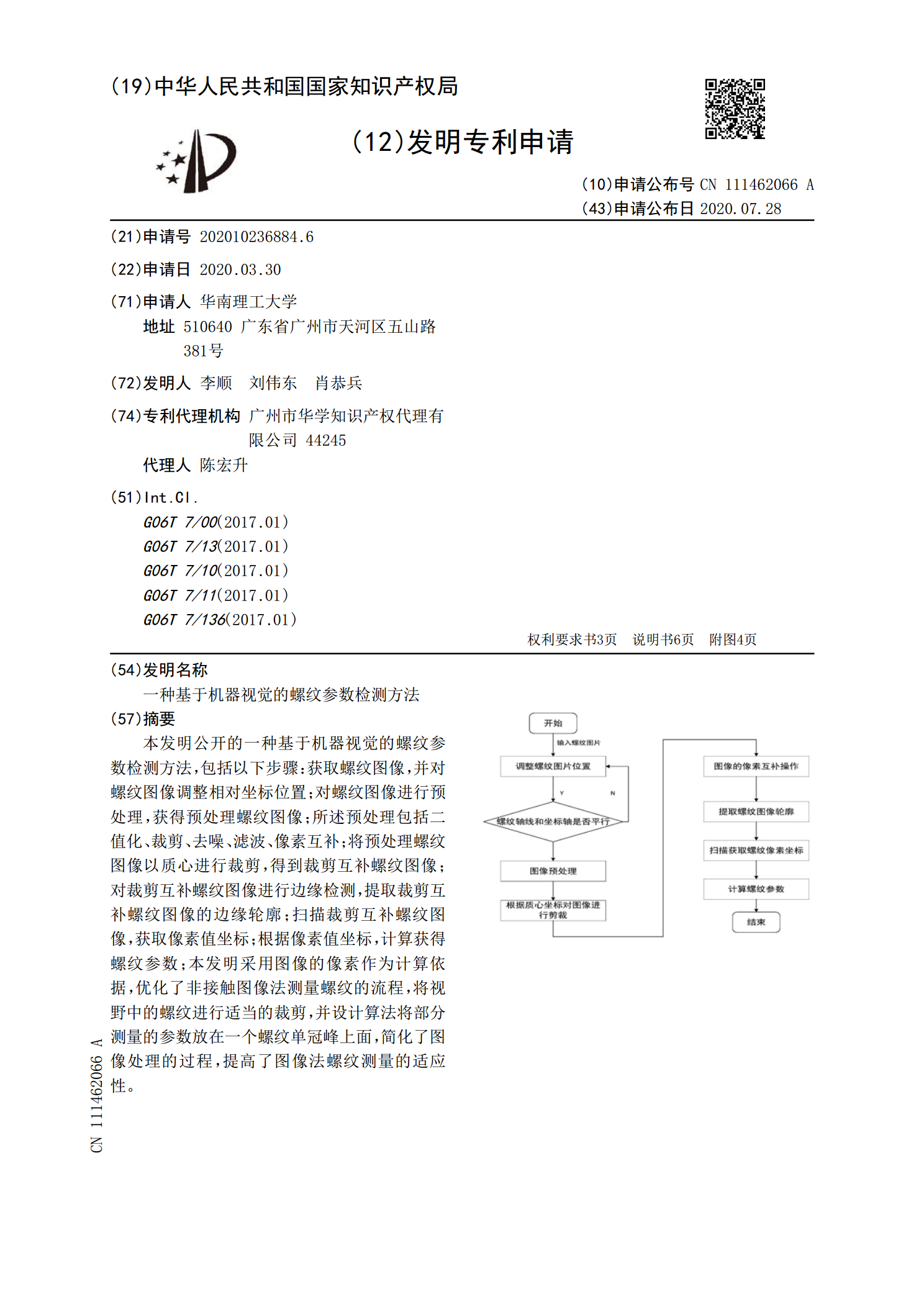
本发明公开的一种基于机器视觉的螺纹参数检测方法,包括以下步骤:获取螺纹图像,并对螺纹图像调整相对坐标位置;对螺纹图像进行预处理,获得预处理螺纹图像;所述预处理包括二值化、裁剪、去噪、滤波、像素互补;将预处理螺纹图像以质心进行裁剪,得到裁剪互补螺纹图像;对裁剪互补螺纹图像进行边缘检测,提取裁剪互补螺纹图像的边缘轮廓;扫描裁剪互补螺纹图像,获取像素值坐标;根据像素值坐标,计算获得螺纹参数;本发明采用图像的像素作为计算依据,优化了非接触图像法测量螺纹的流程,将视野中的螺纹进行适当的裁剪,并设计算法将部分测量的参

一种基于机器视觉的螺纹缺陷检测方法.docx
一种基于机器视觉的螺纹缺陷检测方法基于机器视觉的螺纹缺陷检测方法摘要随着制造业的发展,对产品质量的要求越来越高,螺纹是许多机械设备中常用的连接方式。然而,螺纹制造过程中可能会出现各种缺陷,如图案不清晰、数量不足或过多、杂质等。这些缺陷如果无法及时发现,将对产品质量产生不利影响。为了解决这个问题,本文提出了一种基于机器视觉的螺纹缺陷检测方法。该方法结合了计算机视觉技术和深度学习方法,可以准确检测出螺纹缺陷,提高产品质量。关键词:螺纹缺陷检测;机器视觉;计算机视觉;深度学习1.引言螺纹是一种常见的机械连接方式

基于机器视觉的螺纹参数测量系统.docx
基于机器视觉的螺纹参数测量系统基于机器视觉的螺纹参数测量系统摘要:螺纹是一种常见的连接方式,广泛应用于工业领域。精确测量螺纹参数对于质量控制和产品设计至关重要。然而,传统的螺纹测量方法耗时耗力,且易受人为误差影响。为了解决这个问题,本文提出了一种基于机器视觉的螺纹参数测量系统。该系统利用机器视觉技术进行图像处理和分析,能够快速准确地测量螺纹的参数,并且具有自动化和非接触性的特点。实验结果表明,该系统在螺纹参数测量方面具有较高的精度和可靠性。关键词:机器视觉;螺纹参数测量;图像处理与分析;精度与可靠性1.引

基于机器视觉的内螺纹检测的实现方法.docx
基于机器视觉的内螺纹检测的实现方法基于机器视觉的内螺纹检测的实现方法摘要:内螺纹是一种常见的螺纹结构,在很多工业领域中都有广泛的应用。传统的内螺纹检测方法往往依赖于人工进行目测或测量,效率低下且易出错。随着机器视觉技术的快速发展,基于机器视觉的内螺纹检测成为了一种高效、准确的检测方法。本文主要介绍基于机器视觉的内螺纹检测的实现方法,并修改改进传统方法,提高检测效果。1.引言内螺纹是一种常见的螺纹结构,广泛应用于机械制造、汽车制造、航空航天等领域。传统的内螺纹检测方法往往依赖于人工进行目测或测量,存在效率低

基于SVM特征点分类的机器视觉外螺纹参数检测.docx
基于SVM特征点分类的机器视觉外螺纹参数检测基于SVM特征点分类的机器视觉外螺纹参数检测摘要:机器视觉在工业生产中的应用越来越广泛。本文提出了一种基于SVM特征点分类的机器视觉外螺纹参数检测方法。该方法通过提取外螺纹图像中的特征点,并利用支持向量机进行分类,实现对外螺纹参数的检测。实验结果表明,该方法在外螺纹参数检测方面具有良好的准确性和鲁棒性。1.引言外螺纹的质量对工业产品的装配质量和性能具有重要影响。因此,对外螺纹的参数进行准确检测至关重要。传统的检测方法往往需要大量人力和时间,且结果受人为因素影响。