
一种无人驾驶车辆避障方法及终端.pdf

小代****回来


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种无人驾驶车辆避障方法及终端.pdf
本发明公开了一种无人驾驶车辆避障方法及终端,控制无人驾驶车辆按照预设的路径循迹;在循迹过程中,当检测到存在障碍物时,实时生成避开所述障碍物的最短路径,所述最短路径包括三条依次相连的子路径,所述最短路径的起始点为所述无人驾驶车辆的当前位置,终点为所述预设的路径上的点;控制所述无人驾驶车辆根据所述最短路径循迹,当循迹完成时,继续按照预设的路径循迹;将避障路径分为三段分别计算,细化避障路径,使得其可以更加贴近障碍物轮廓,使得避障路径长度最小,同时以预设的路径上的点作为避障路径的终点,使避障路径和预设的路径更加连

一种基于Dubins路径的无人驾驶车辆避障控制装置及控制方法.pdf
本发明提供了一种基于Dubins路径的无人驾驶车辆避障控制装置及控制方法,装置包括设置在无人驾驶车辆左侧A柱外部的摄像头和一个设置在无人驾驶车辆右侧A柱外部的摄像头以及一个设于无人驾驶车辆车顶的激光雷达;方法为:雷达对进入摄像头监控范围内的障碍物进行定位测速;基于避障算法确定即将与智能车发生碰撞的障碍物序列;智能车根据新的障碍物序列对当前避障路径进行重新规划,以完成避障操作;本发明将摄像头设于无人驾驶车辆的两A柱中部,有效地解决了无人驾驶车辆视野盲区的问题,同时提高了采集信息的完善、准确程度;将无人驾驶中

一种无人驾驶带避障的路径规划方法研究.pptx
一种无人驾驶带避障的路径规划方法研究目录添加章节标题无人驾驶带避障的路径规划方法概述路径规划的定义和重要性无人驾驶带避障的路径规划方法的基本原理无人驾驶带避障的路径规划方法的优缺点无人驾驶带避障的路径规划方法的关键技术障碍物检测技术路径规划算法导航控制技术传感器数据处理技术无人驾驶带避障的路径规划方法的应用场景和案例分析无人驾驶带避障的路径规划方法在智能交通领域的应用无人驾驶带避障的路径规划方法在物流领域的应用无人驾驶带避障的路径规划方法在农业领域的应用无人驾驶带避障的路径规划方法在军事领域的应用无人驾驶

一种无人驾驶带避障的路径规划方法研究.docx
一种无人驾驶带避障的路径规划方法研究摘要随着无人驾驶技术的不断发展,路径规划成为无人驾驶中不可或缺的一环。本文提出了一种无人驾驶带避障的路径规划方法。该方法基于遗传算法优化的Dijkstra算法,在保证车辆正常行驶的同时,有效避免了碰撞情况的发生。实验表明,该方法能够快速且有效地规划无人驾驶路径,同时具有较高的安全性和稳定性。关键词:无人驾驶;路径规划;避障;遗传算法;Dijkstra算法1.引言无人驾驶技术的发展在近年来取得了长足的进步。然而,如何保证无人驾驶在复杂环境下的安全行驶,是当前难点和研究重点
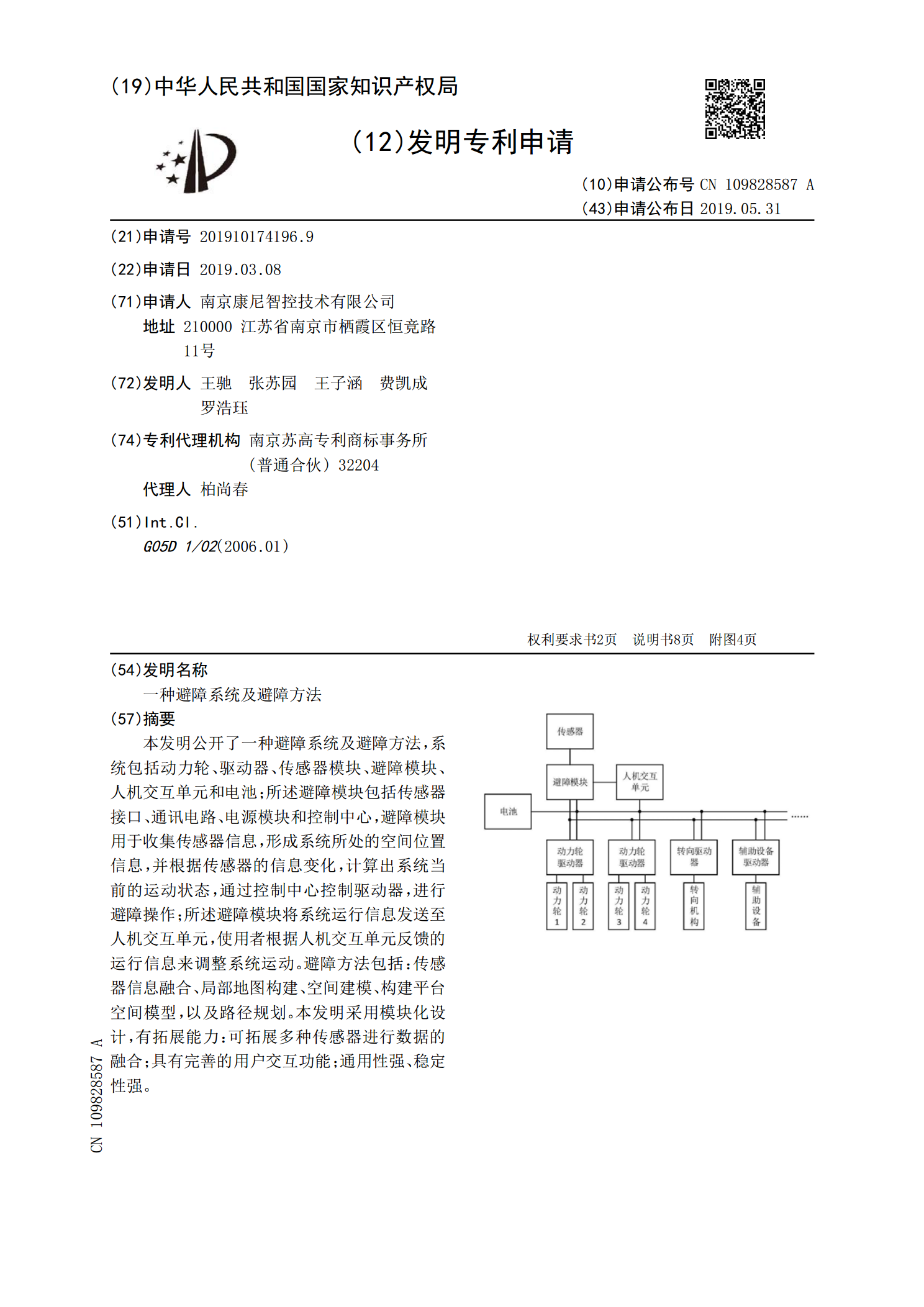
一种避障系统及避障方法.pdf
本发明公开了一种避障系统及避障方法,系统包括动力轮、驱动器、传感器模块、避障模块、人机交互单元和电池;所述避障模块包括传感器接口、通讯电路、电源模块和控制中心,避障模块用于收集传感器信息,形成系统所处的空间位置信息,并根据传感器的信息变化,计算出系统当前的运动状态,通过控制中心控制驱动器,进行避障操作;所述避障模块将系统运行信息发送至人机交互单元,使用者根据人机交互单元反馈的运行信息来调整系统运动。避障方法包括:传感器信息融合、局部地图构建、空间建模、构建平台空间模型,以及路径规划。本发明采用模块化设计,