
基于单图像的自适应三维人脸重建方法.pdf

是你****芹呀


1/10

2/10

3/10

4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于单图像的自适应三维人脸重建方法.pdf
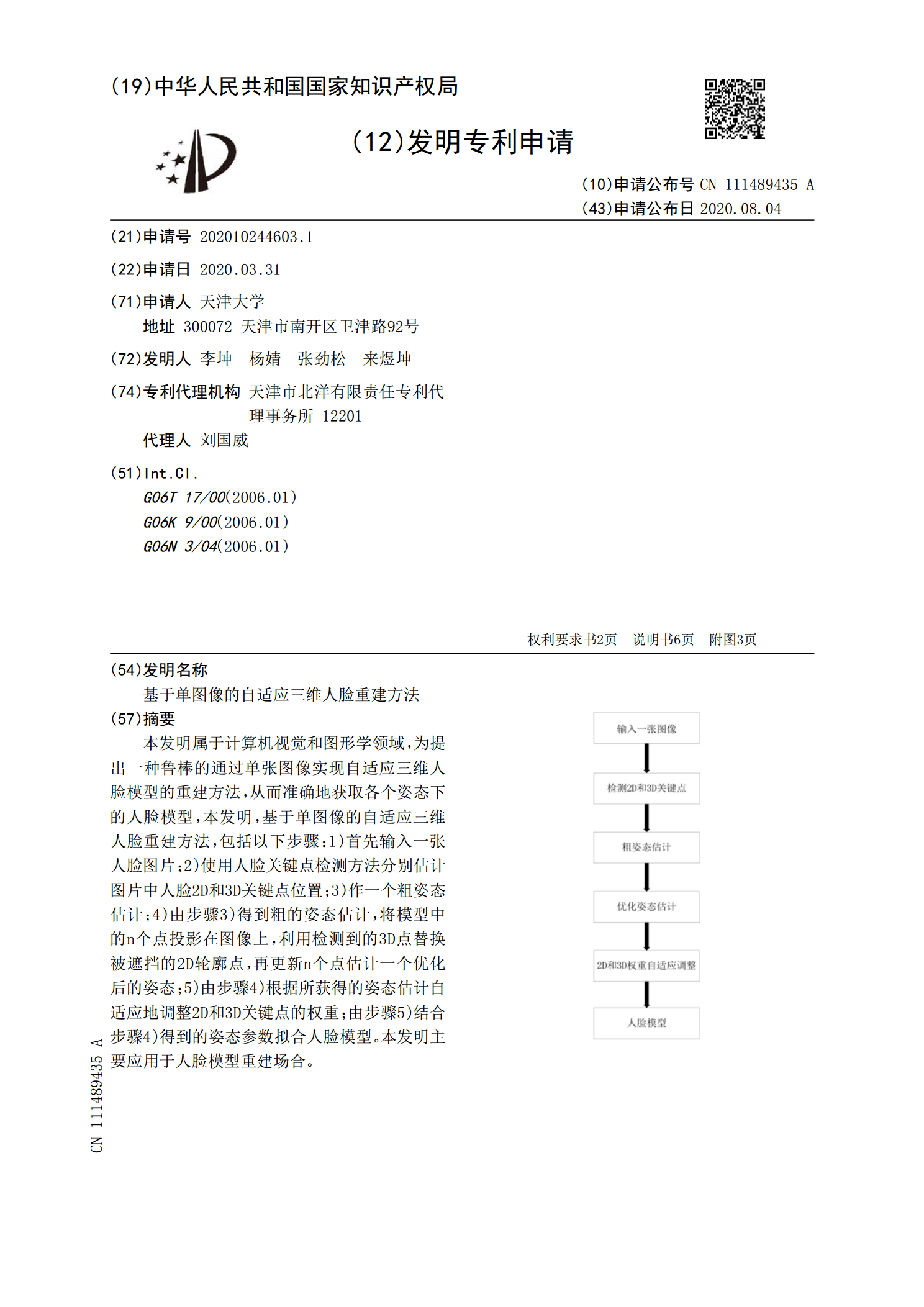
本发明属于计算机视觉和图形学领域,为提出一种鲁棒的通过单张图像实现自适应三维人脸模型的重建方法,从而准确地获取各个姿态下的人脸模型,本发明,基于单图像的自适应三维人脸重建方法,包括以下步骤:1)首先输入一张人脸图片;2)使用人脸关键点检测方法分别估计图片中人脸2D和3D关键点位置;3)作一个粗姿态估计;4)由步骤3)得到粗的姿态估计,将模型中的n个点投影在图像上,利用检测到的3D点替换被遮挡的2D轮廓点,再更新n个点估计一个优化后的姿态;5)由步骤4)根据所获得的姿态估计自适应地调整2D和3D关键点的权重

基于单帧人脸图像的实时三维人脸重建方法.pdf
本发明公开了一种基于单帧人脸图像的实时三维人脸重建方法,步骤如下:从摄像头获取人脸图像,对图像进行人脸检测与人脸特征点定位与标注;根据人脸特征点的定位进行头部的姿态计算,获得图像中头部的旋转参数;使用特征点进行人脸归一化,计算归一化后的人脸深度信息;使用人脸深度信息,对标准头部三维网格模型进行变形;根据特征点与输入图像获得人体头部纹理图像;利用旋转参数与归一化获得变形后的头部网格点与纹理图像的直接映射关系;使用变形后的头部网格点、纹理图像与两者间的对应关系进行三维绘制与渲染,并展示给用户。本方法通过展示时
基于人脸RGB图像的三维人脸重建方法及装置.pdf
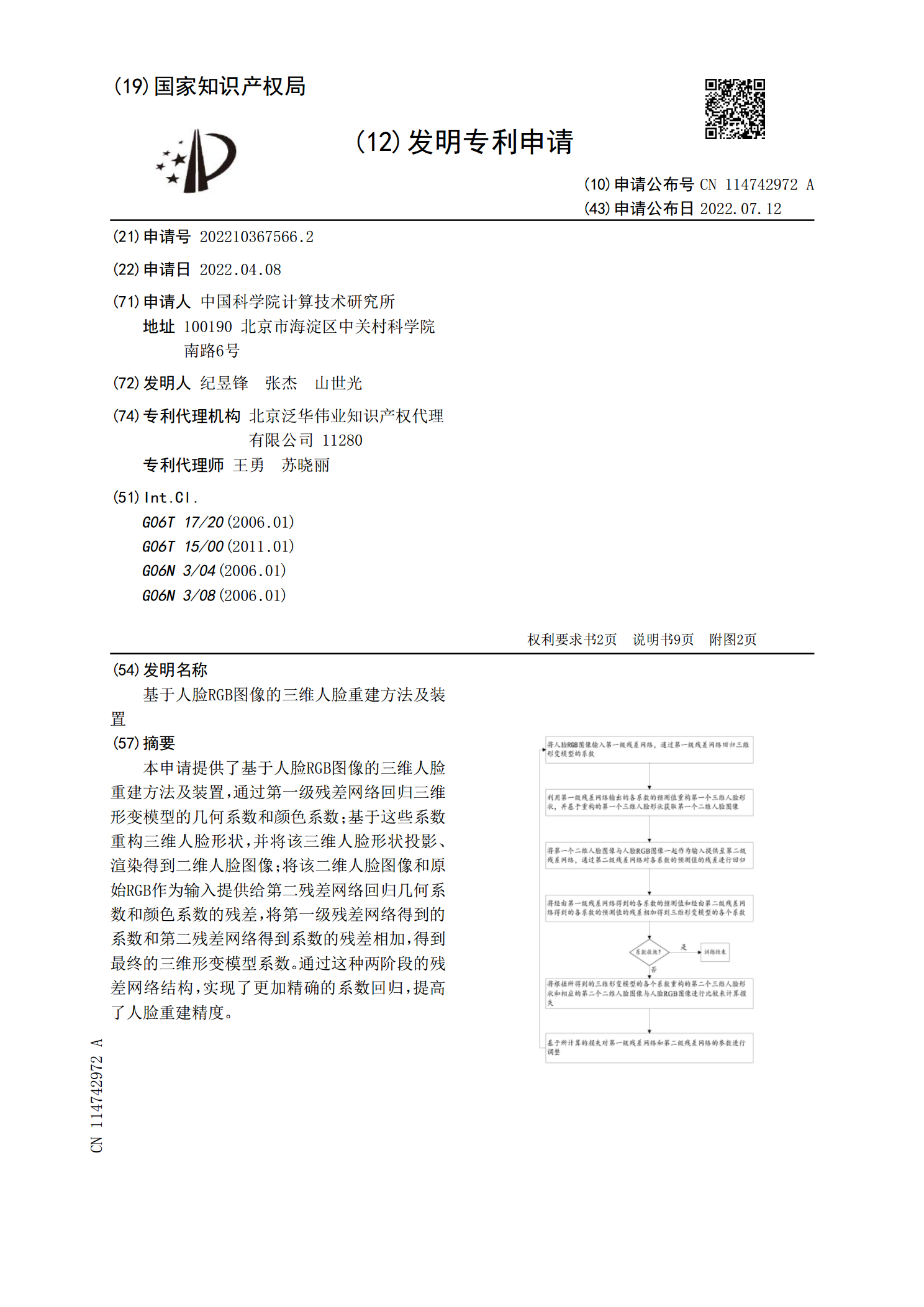
本申请提供了基于人脸RGB图像的三维人脸重建方法及装置,通过第一级残差网络回归三维形变模型的几何系数和颜色系数;基于这些系数重构三维人脸形状,并将该三维人脸形状投影、渲染得到二维人脸图像;将该二维人脸图像和原始RGB作为输入提供给第二残差网络回归几何系数和颜色系数的残差,将第一级残差网络得到的系数和第二残差网络得到系数的残差相加,得到最终的三维形变模型系数。通过这种两阶段的残差网络结构,实现了更加精确的系数回归,提高了人脸重建精度。

基于单张图像的三维人脸重建.docx
基于单张图像的三维人脸重建标题:基于单张图像的三维人脸重建摘要:三维人脸重建是计算机视觉领域的热门研究方向之一,它在人机交互、虚拟现实、安防监控等方面具有广泛的应用价值。本论文将重点关注基于单张图像的三维人脸重建技术,从数据采集、特征提取、模型建立以及结果渲染等方面全面分析和探讨,旨在提供一种有效的方法来还原和重建人脸的三维结构。1.引言三维人脸重建技术可通过单张图像恢复出人脸的三维几何结构、纹理信息和表情变化等,对于人脸研究和应用具有重要意义。相比于基于多视角图像、深度相机或三维扫描仪的多视角重建方法,
基于单张人脸图像的实时全自动高质量三维人脸重建方法.pdf
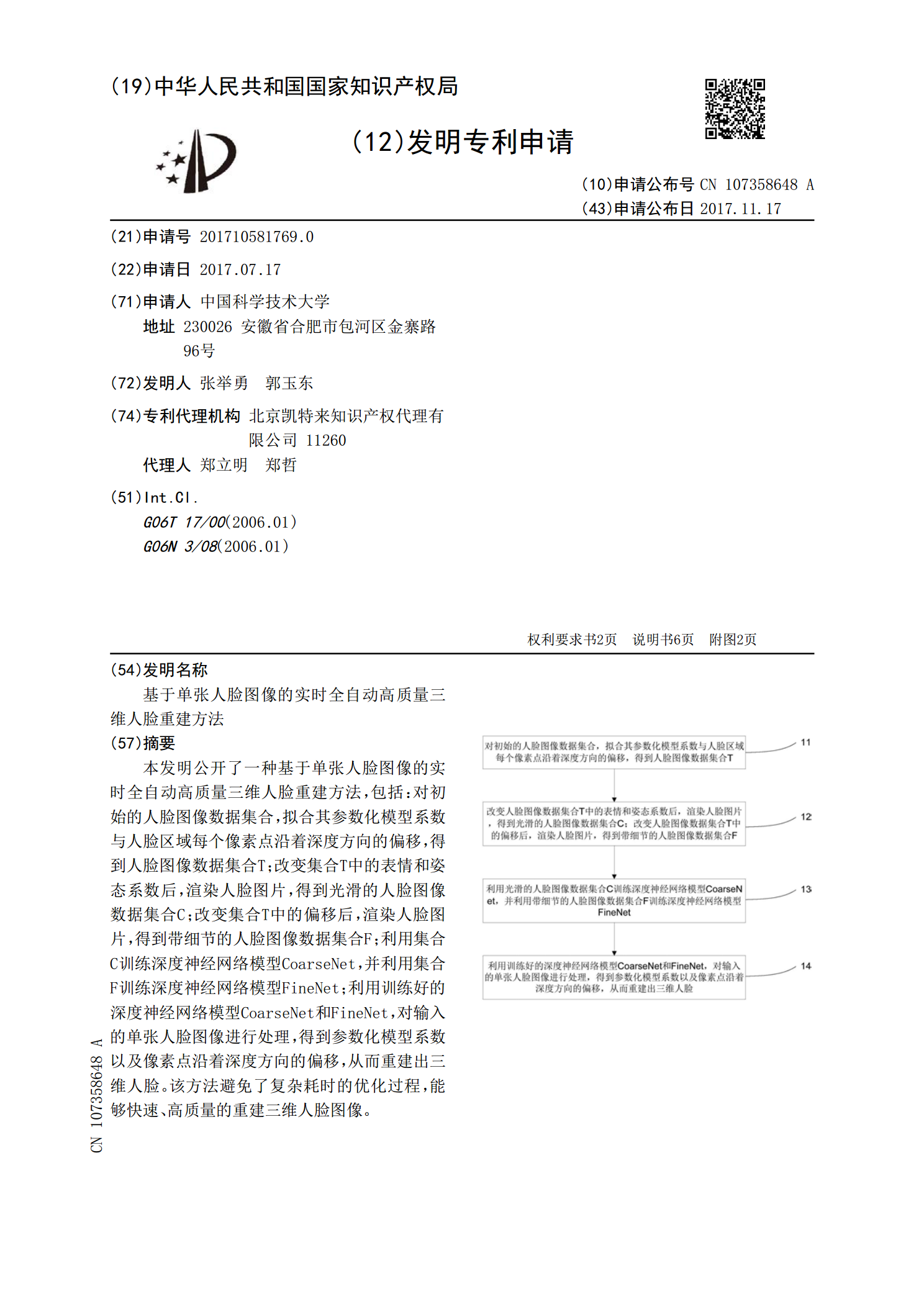
本发明公开了一种基于单张人脸图像的实时全自动高质量三维人脸重建方法,包括:对初始的人脸图像数据集合,拟合其参数化模型系数与人脸区域每个像素点沿着深度方向的偏移,得到人脸图像数据集合T;改变集合T中的表情和姿态系数后,渲染人脸图片,得到光滑的人脸图像数据集合C;改变集合T中的偏移后,渲染人脸图片,得到带细节的人脸图像数据集合F;利用集合C训练深度神经网络模型CoarseNet,并利用集合F训练深度神经网络模型FineNet;利用训练好的深度神经网络模型CoarseNet和FineNet,对输入的单张人脸图像