
一种焊接轮圈打磨方法及打磨系统.pdf

雨巷****轶丽

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种焊接轮圈打磨方法及打磨系统.pdf
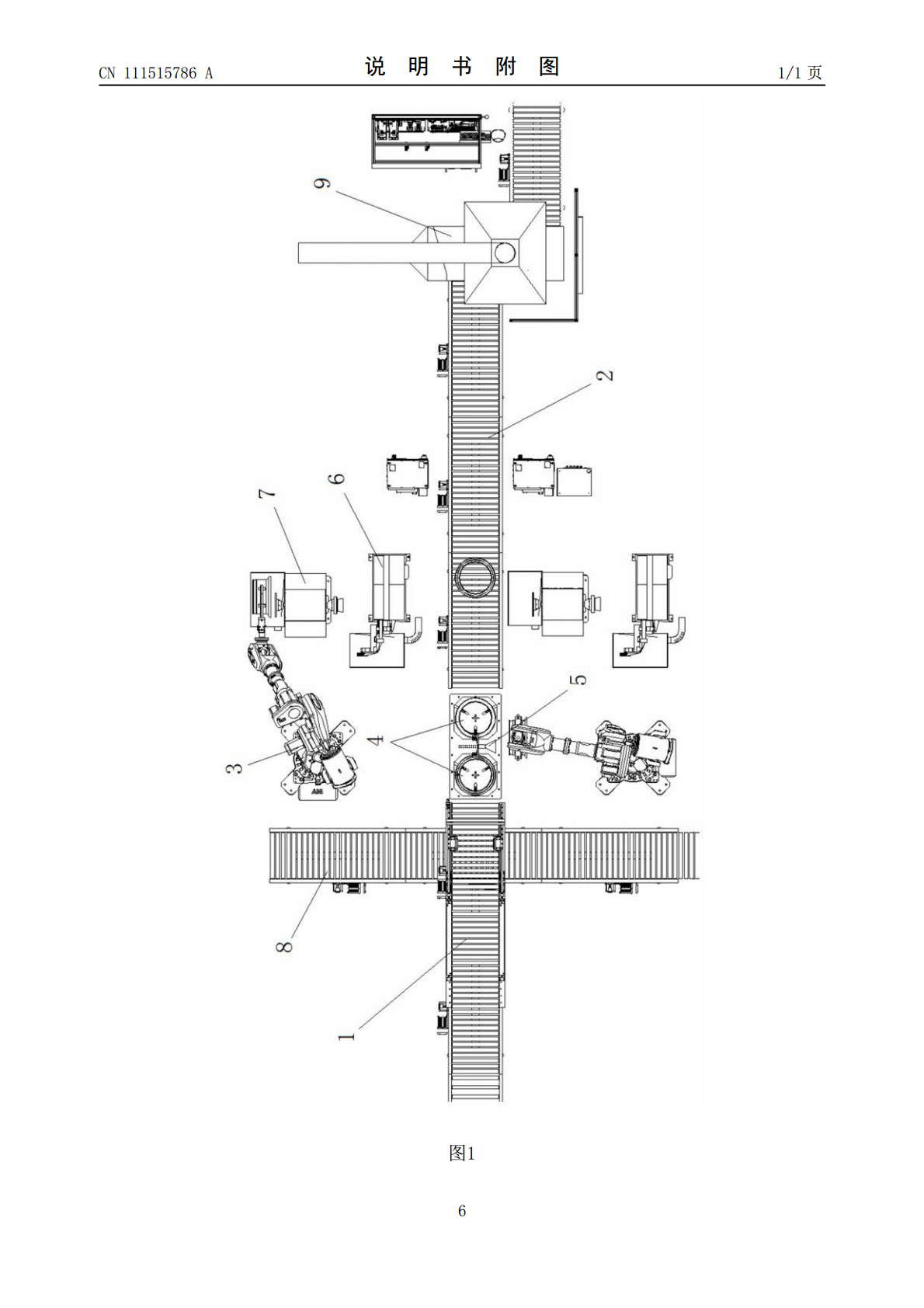
本发明属于轮圈打磨处理领域,提供了一种焊接轮圈打磨系统,包括依次连接的轮圈来料装置、打磨作业系统和成品输出装置,打磨作业系统包括机器人、焊缝定位装置和打磨装置。同时提供了一种焊接轮圈打磨方法。本发明提供的焊接轮圈打磨方法及打磨系统,实现了全过程自动化打磨,节省了人力,提高了打磨效率,提高了产品质量。
一种轮辋焊接点自动打磨机床的打磨方法.pdf
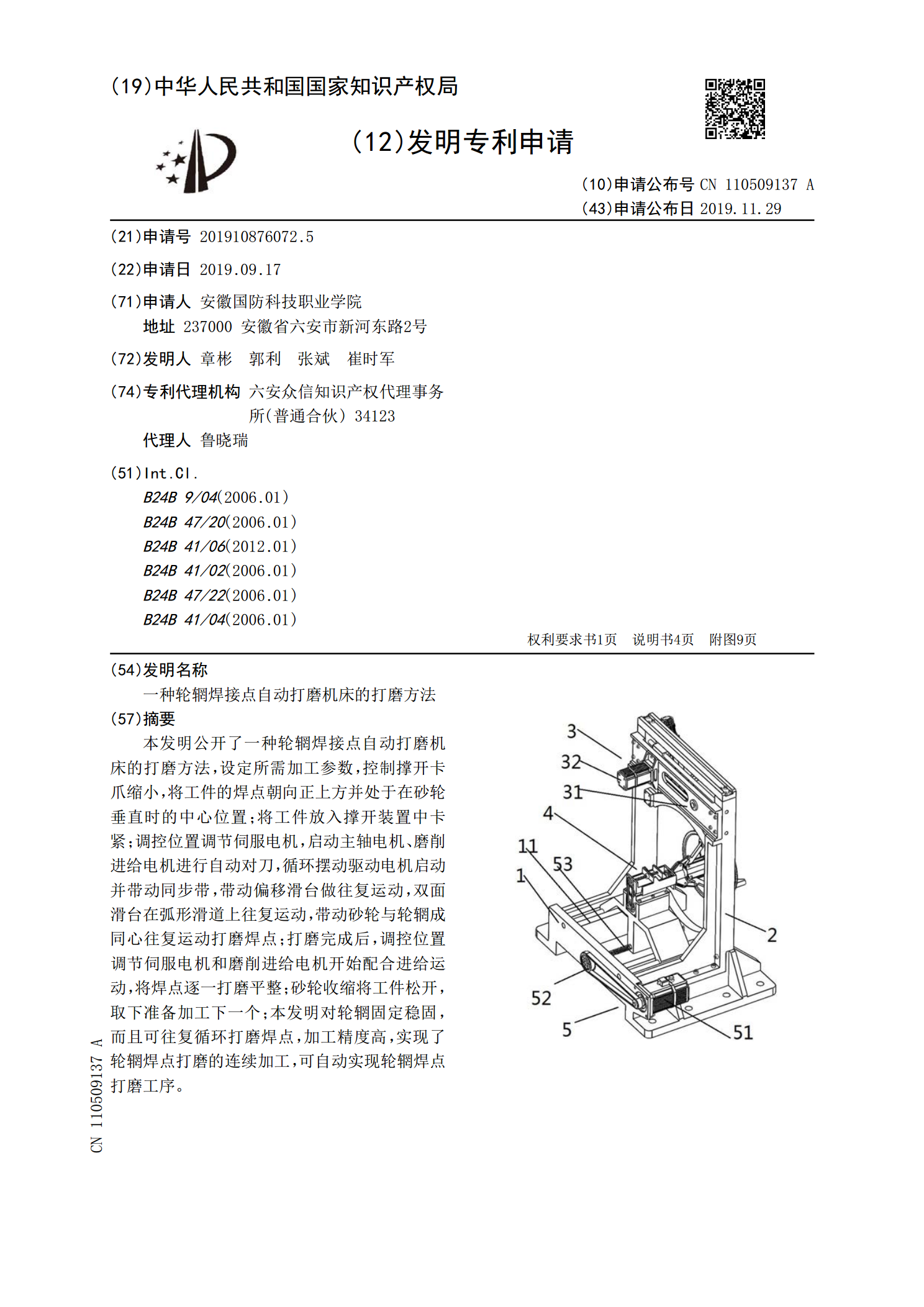
本发明公开了一种轮辋焊接点自动打磨机床的打磨方法,设定所需加工参数,控制撑开卡爪缩小,将工件的焊点朝向正上方并处于在砂轮垂直时的中心位置;将工件放入撑开装置中卡紧;调控位置调节伺服电机,启动主轴电机、磨削进给电机进行自动对刀,循环摆动驱动电机启动并带动同步带,带动偏移滑台做往复运动,双面滑台在弧形滑道上往复运动,带动砂轮与轮辋成同心往复运动打磨焊点;打磨完成后,调控位置调节伺服电机和磨削进给电机开始配合进给运动,将焊点逐一打磨平整;砂轮收缩将工件松开,取下准备加工下一个;本发明对轮辋固定稳固,而且可往复循
一种基于视觉的鞋底打磨系统及打磨方法.pdf
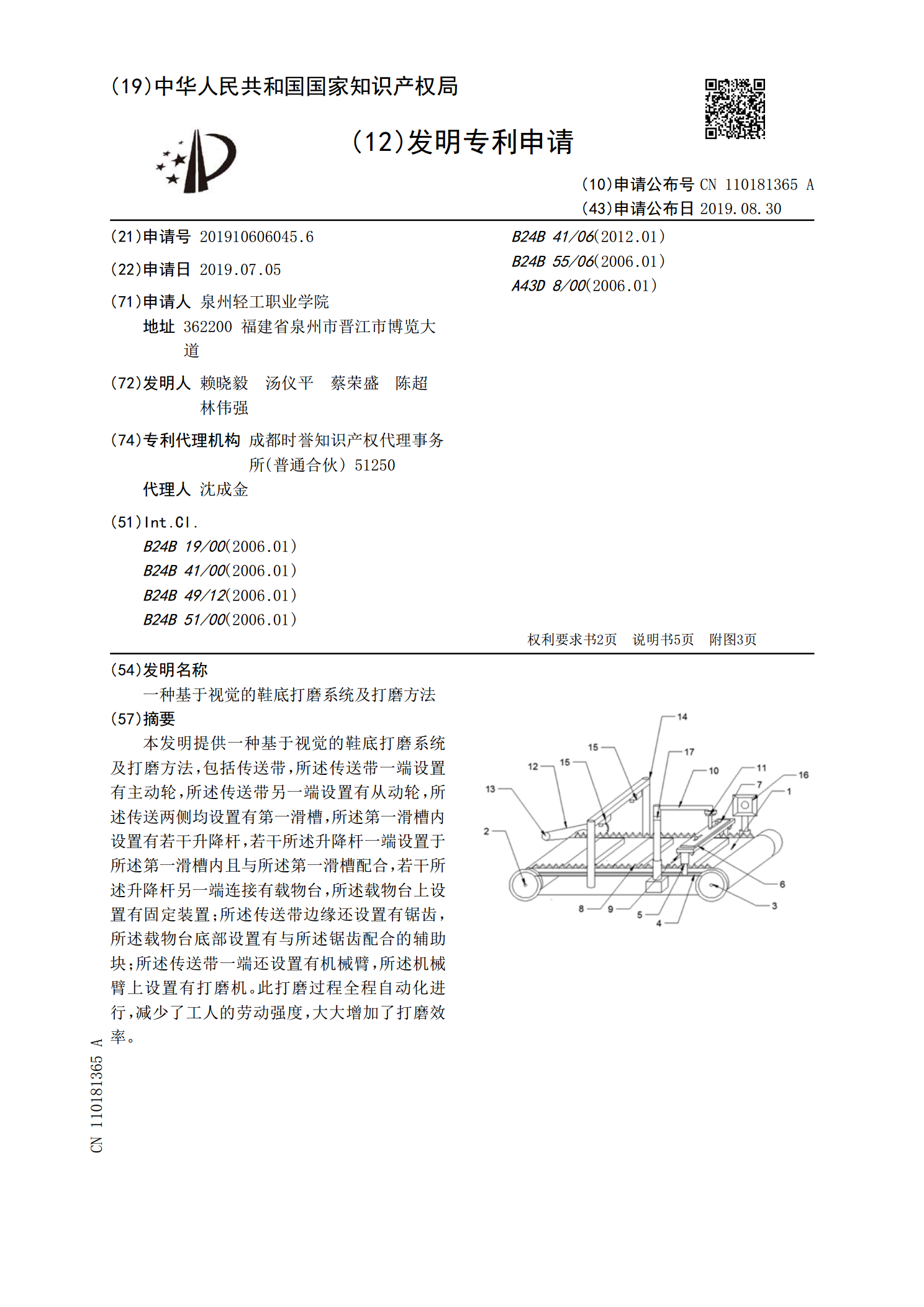
本发明提供一种基于视觉的鞋底打磨系统及打磨方法,包括传送带,所述传送带一端设置有主动轮,所述传送带另一端设置有从动轮,所述传送两侧均设置有第一滑槽,所述第一滑槽内设置有若干升降杆,若干所述升降杆一端设置于所述第一滑槽内且与所述第一滑槽配合,若干所述升降杆另一端连接有载物台,所述载物台上设置有固定装置;所述传送带边缘还设置有锯齿,所述载物台底部设置有与所述锯齿配合的辅助块;所述传送带一端还设置有机械臂,所述机械臂上设置有打磨机。此打磨过程全程自动化进行,减少了工人的劳动强度,大大增加了打磨效率。
一种自动钢轨焊接打磨方法.pdf
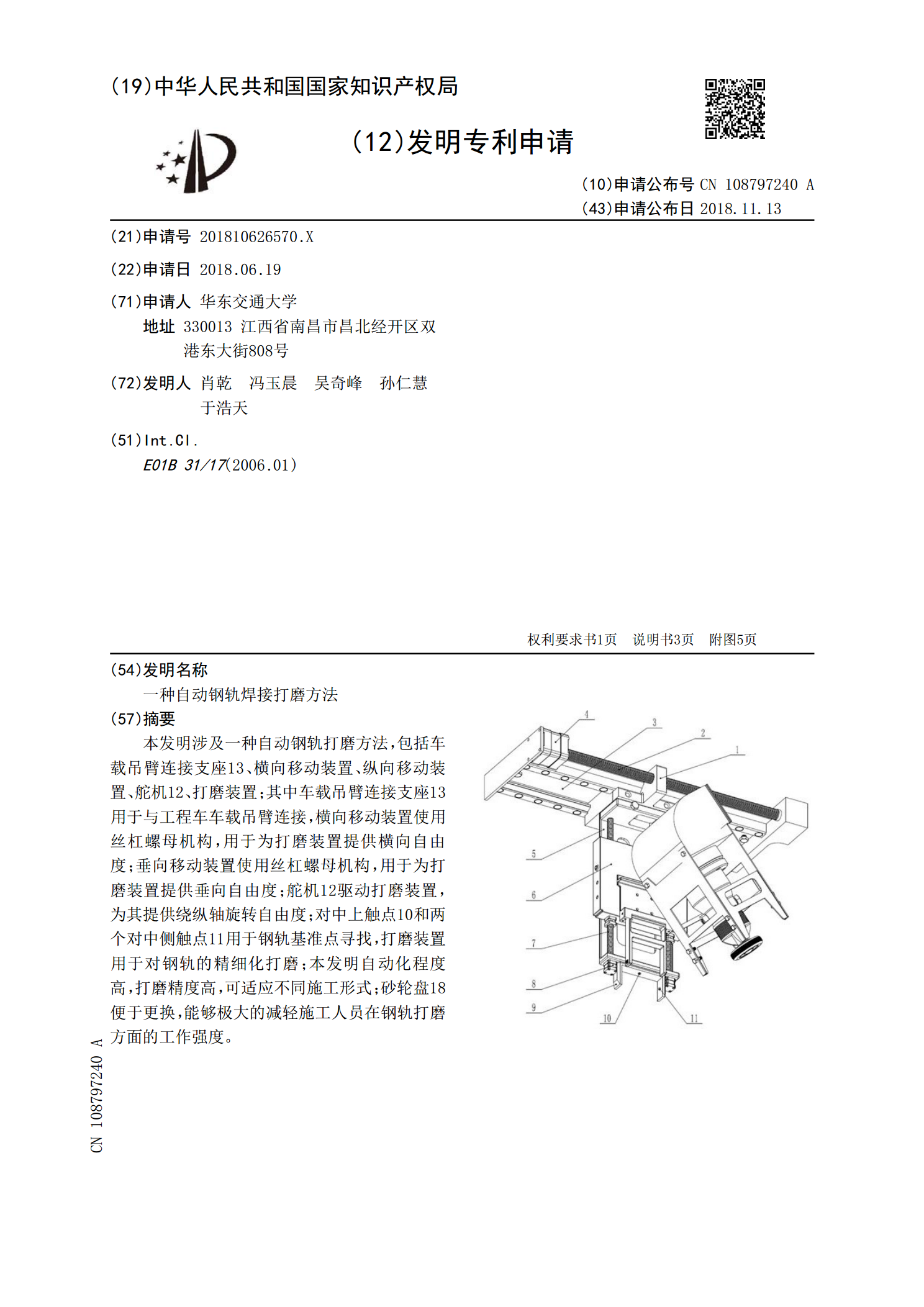
本发明涉及一种自动钢轨打磨方法,包括车载吊臂连接支座13、横向移动装置、纵向移动装置、舵机12、打磨装置;其中车载吊臂连接支座13用于与工程车车载吊臂连接,横向移动装置使用丝杠螺母机构,用于为打磨装置提供横向自由度;垂向移动装置使用丝杠螺母机构,用于为打磨装置提供垂向自由度;舵机12驱动打磨装置,为其提供绕纵轴旋转自由度;对中上触点10和两个对中侧触点11用于钢轨基准点寻找,打磨装置用于对钢轨的精细化打磨;本发明自动化程度高,打磨精度高,可适应不同施工形式;砂轮盘18便于更换,能够极大的减轻施工人员在钢轨

焊接球制作打磨工具及制作打磨方法.pdf
本发明涉及一种焊接球制作打磨工具及制作打磨方法,该制作打磨工具包括:基座,基座上设有用于分别固定不同直径半球模具的多个固定孔组,每个固定孔组均包括多个固定孔,固定孔上配合装有连接件,模具上设有供对应固定孔组的多个连接件一一对应连接的多个连接孔;转动安装于基座上的圆形旋转平台,旋转平台上沿径向设有多个滑槽,滑槽内对应待焊接半球的位置处装有可沿相应滑槽滑动的支撑杆,滑槽与相应支撑杆通过锁定件锁定;打磨装置,包括高度可调的装于基座上的升降架及装于升降架顶部并对应旋转平台圆心位置处的打磨器。本发明集制作和打磨为一