
一种空基视角下的生成对抗网络图像补全方法.pdf

纪阳****公主

1/8
2/8
3/8

4/8

5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种空基视角下的生成对抗网络图像补全方法.pdf
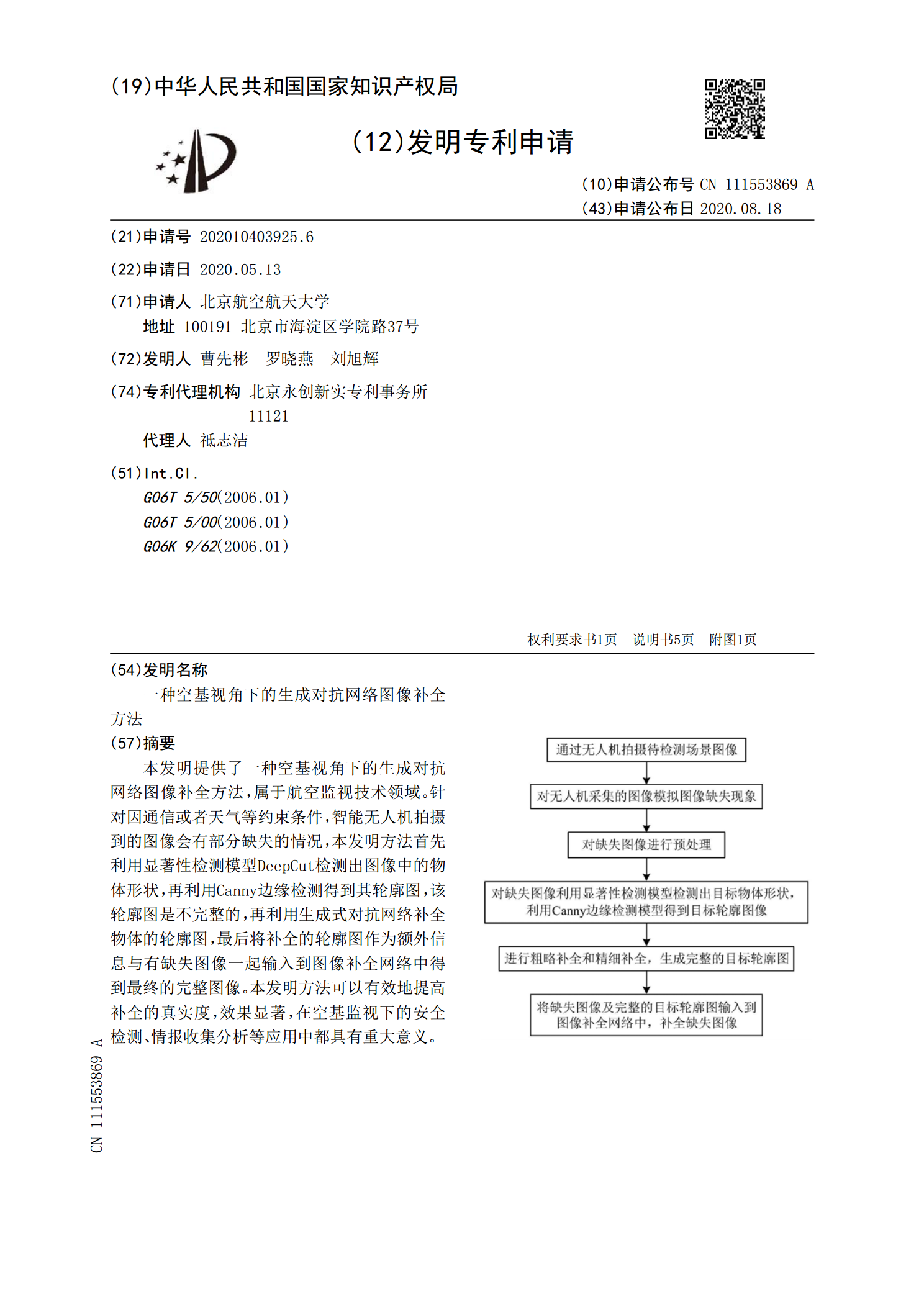
本发明提供了一种空基视角下的生成对抗网络图像补全方法,属于航空监视技术领域。针对因通信或者天气等约束条件,智能无人机拍摄到的图像会有部分缺失的情况,本发明方法首先利用显著性检测模型DeepCut检测出图像中的物体形状,再利用Canny边缘检测得到其轮廓图,该轮廓图是不完整的,再利用生成式对抗网络补全物体的轮廓图,最后将补全的轮廓图作为额外信息与有缺失图像一起输入到图像补全网络中得到最终的完整图像。本发明方法可以有效地提高补全的真实度,效果显著,在空基监视下的安全检测、情报收集分析等应用中都具有重大意义。
一种基于生成对抗图像补全网络的步态识别方法.pdf
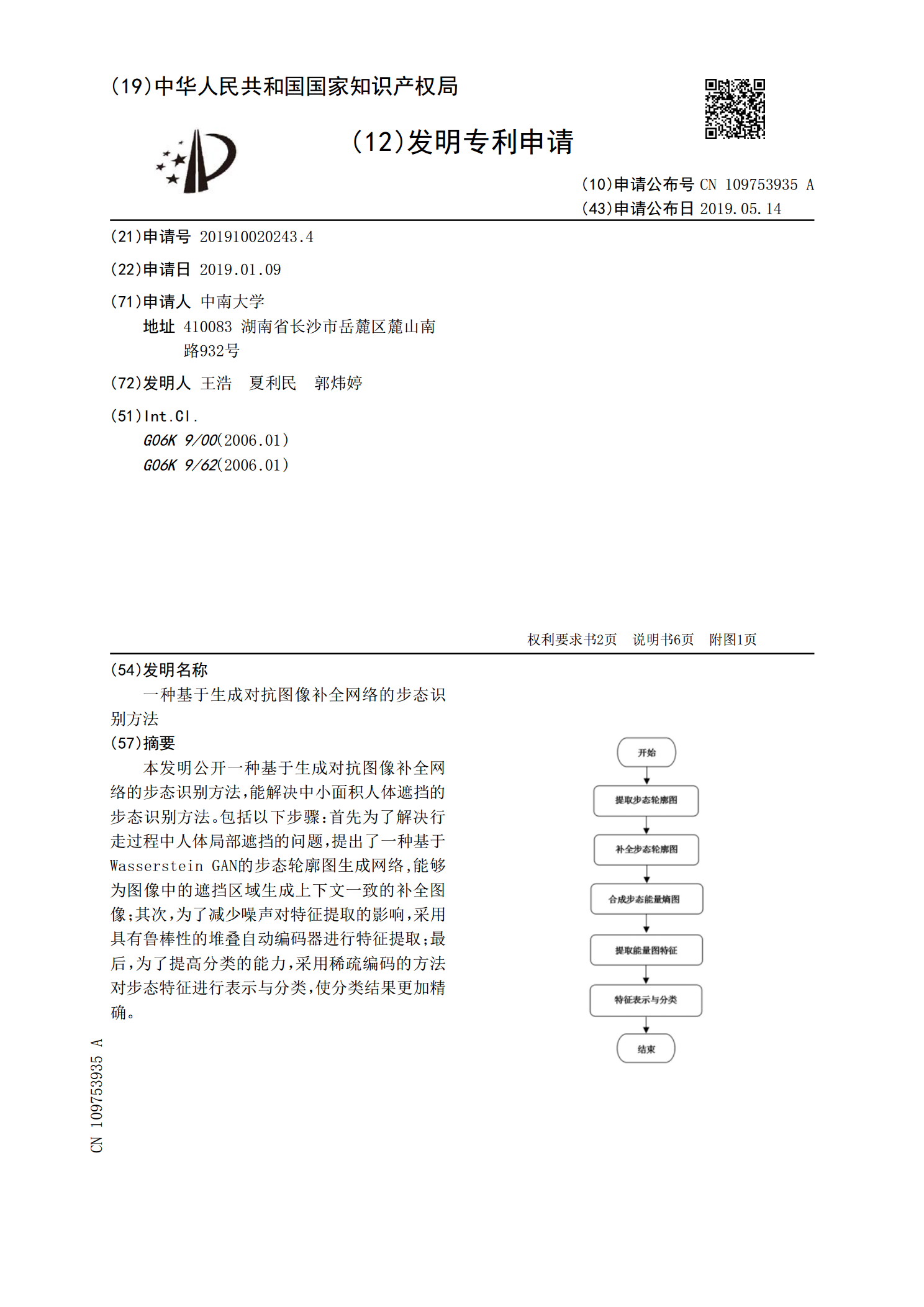
本发明公开一种基于生成对抗图像补全网络的步态识别方法,能解决中小面积人体遮挡的步态识别方法。包括以下步骤:首先为了解决行走过程中人体局部遮挡的问题,提出了一种基于WassersteinGAN的步态轮廓图生成网络,能够为图像中的遮挡区域生成上下文一致的补全图像;其次,为了减少噪声对特征提取的影响,采用具有鲁棒性的堆叠自动编码器进行特征提取;最后,为了提高分类的能力,采用稀疏编码的方法对步态特征进行表示与分类,使分类结果更加精确。

一种基于条件胶囊生成对抗网络的图像生成方法.pdf
本发明公开了一种基于条件胶囊生成对抗网络的图像生成方法,包括下述步骤:图像数据采集并对图像进行预处理;提取出条件向量;获取随机噪声;设计一个神经网络作为生成器将随机噪声和条件向量映射为生成图片;设计另外一个神经网络作为判别器接收生成图片、真实图片和条件向量得到损失值;在训练对抗网络时,根据损失值最小化目标函数来调节生成器网络权值;训练完成后,生成器网络权值调整到最佳,此时舍弃判别器,保留生成器模型作为生成图像的最佳神经网络。本发明通过利用胶囊神经网络来设计判别器结构,结合现有的WGAN和CGAN的优点,网
基于生成对抗网络的端到端点云补全方法.pdf
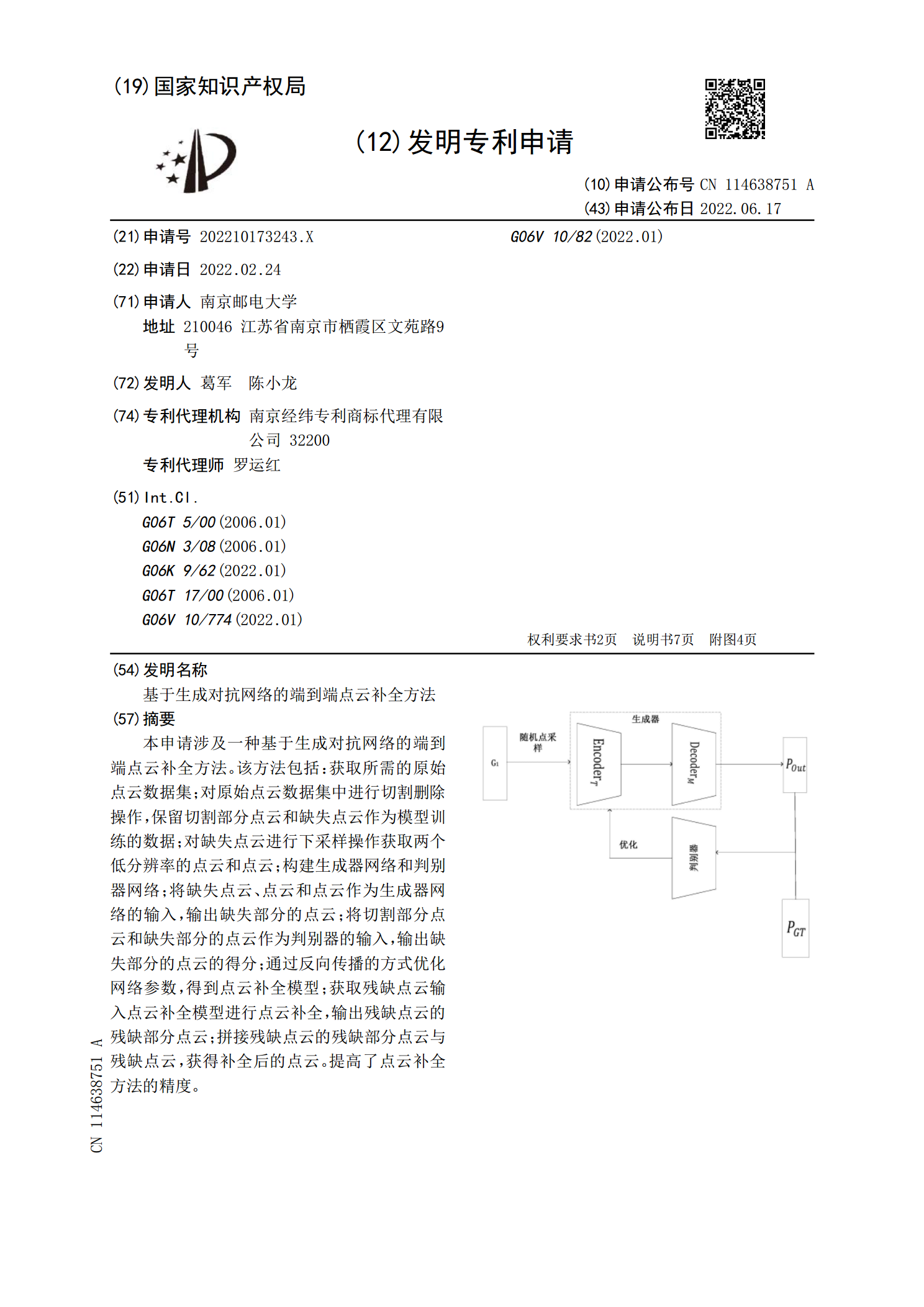
本申请涉及一种基于生成对抗网络的端到端点云补全方法。该方法包括:获取所需的原始点云数据集;对原始点云数据集中进行切割删除操作,保留切割部分点云和缺失点云作为模型训练的数据;对缺失点云进行下采样操作获取两个低分辨率的点云和点云;构建生成器网络和判别器网络;将缺失点云、点云和点云作为生成器网络的输入,输出缺失部分的点云;将切割部分点云和缺失部分的点云作为判别器的输入,输出缺失部分的点云的得分;通过反向传播的方式优化网络参数,得到点云补全模型;获取残缺点云输入点云补全模型进行点云补全,输出残缺点云的残缺部分点云

一种生成对抗网络用于图像修复的方法.pdf
本发明公开了一种图像修复模型PRGAN,由两个相互独立的生成对抗网络模块组成。其中图像修复网络模块PConv‑GAN由部分卷积与对抗网络组合而成,用于对不规则掩模进行修复,同时根据判别器的反馈使得图像的整体纹理结构以及色彩更加逼近于原图。为解决因修复网络模块的不足而造成图像产生局部色差和轻度边界伪影的问题,本发明设计了图像优化网络模块。图像优化网络模块Res‑GAN将深度残差网络与对抗网络相结合,并且通过结合对抗损失、感知损失及内容损失对图像优化网络模块进行训练,使得图像中非缺失区域的信息得到保留,从而保