
一种烧结机台车车轮自动给脂系统及方法.pdf

是立****92

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种烧结机台车车轮自动给脂系统及方法.pdf
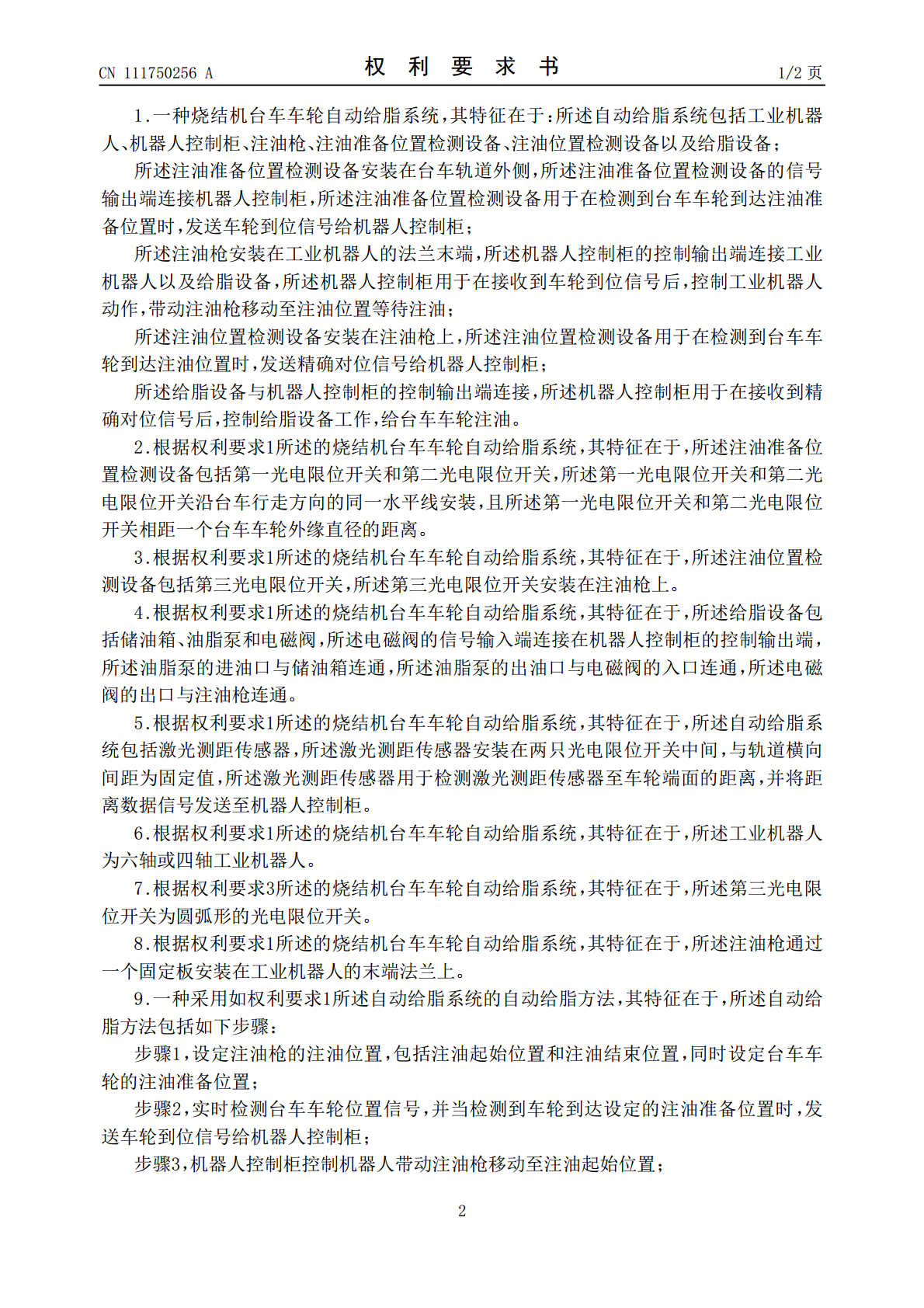
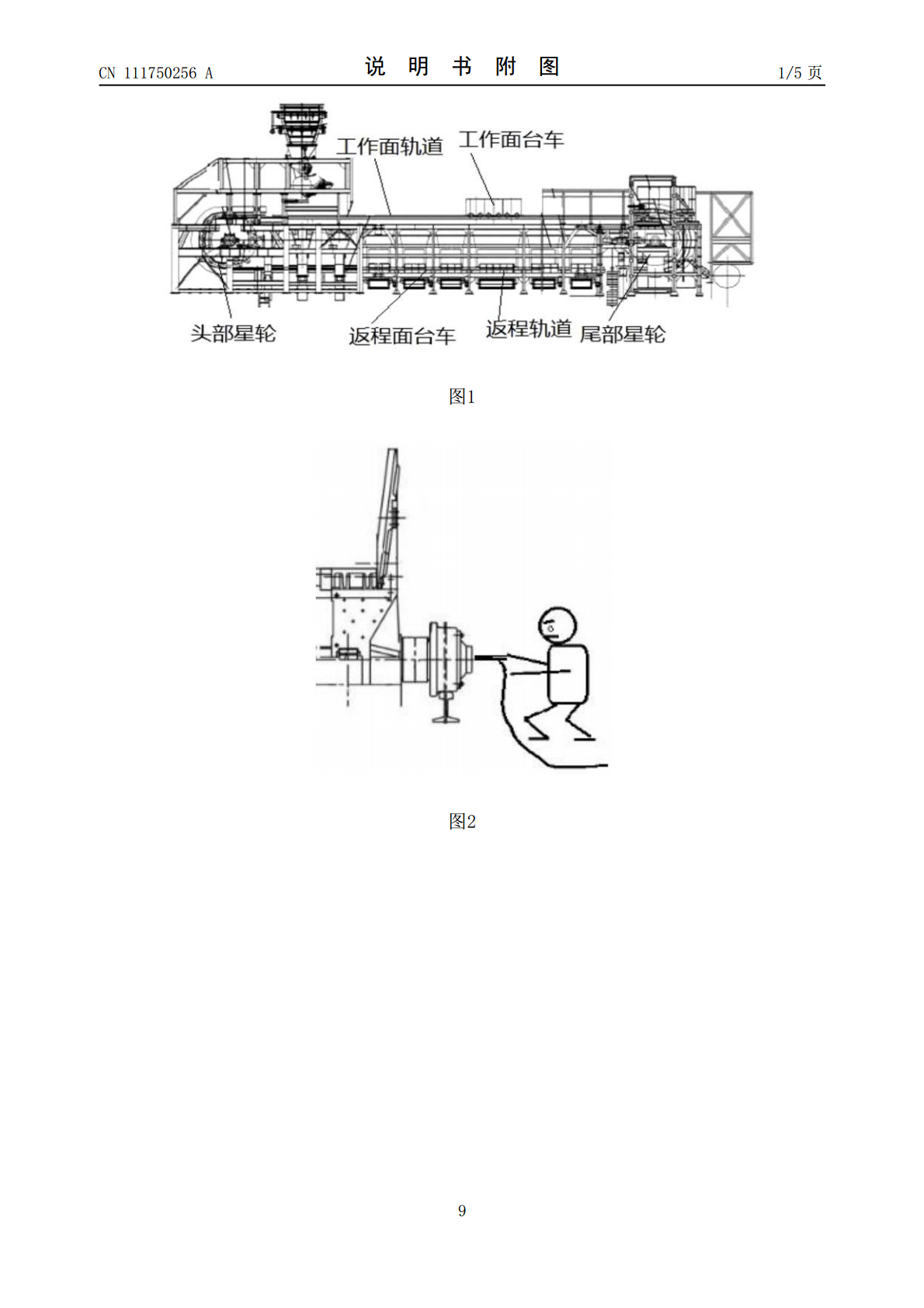
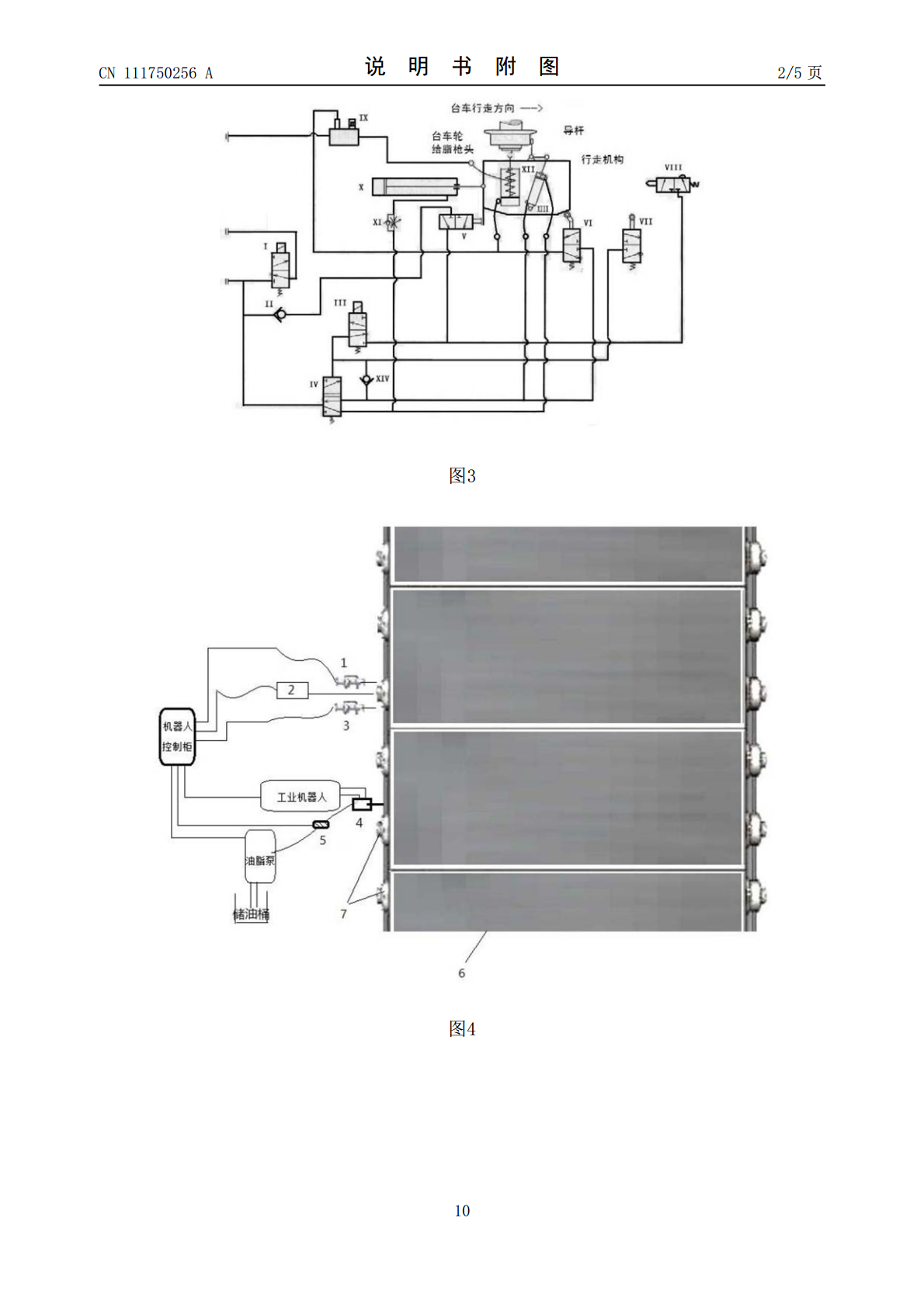
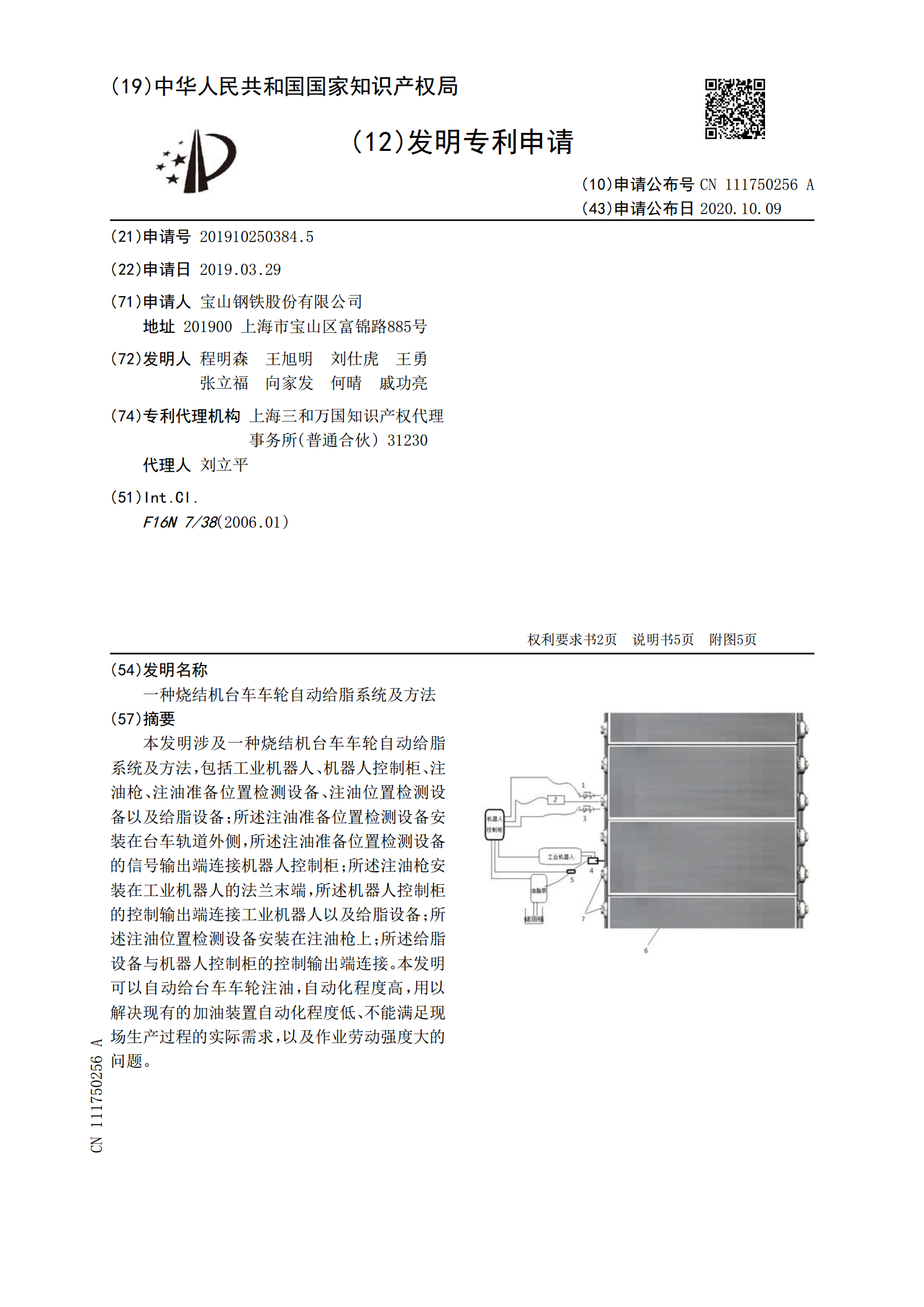
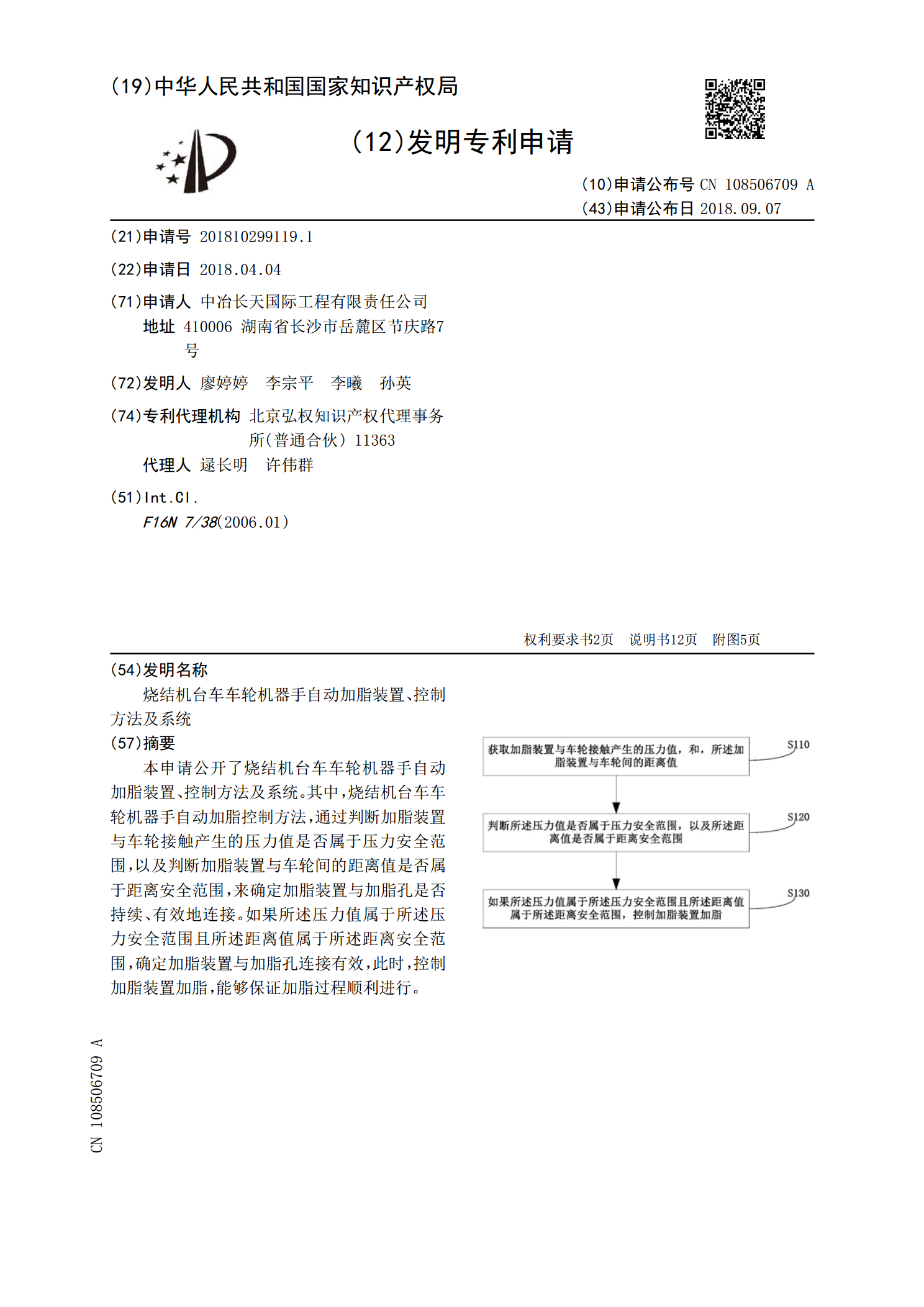
本发明涉及一种烧结机台车车轮自动给脂系统及方法,包括工业机器人、机器人控制柜、注油枪、注油准备位置检测设备、注油位置检测设备以及给脂设备;所述注油准备位置检测设备安装在台车轨道外侧,所述注油准备位置检测设备的信号输出端连接机器人控制柜;所述注油枪安装在工业机器人的法兰末端,所述机器人控制柜的控制输出端连接工业机器人以及给脂设备;所述注油位置检测设备安装在注油枪上;所述给脂设备与机器人控制柜的控制输出端连接。本发明可以自动给台车车轮注油,自动化程度高,用以解决现有的加油装置自动化程度低、不能满足现场生产过程

烧结机台车轮自动加油方法及自动加油系统.pdf
本发明公开了一种烧结机台车轮自动加油方法及自动加油系统,其自动加油方法依次通过:1)连续获取烧结机台车轮图像,2)标识台车轮进行并车轮上油渍的油渍面积,3)计算出烧结机台车的实时运行速度,4)判断出需要加油的台车轮并给出其运行至注油装置的运行时间;5)注油装置进行注油五个步骤实现,对应的自动加油系统包括两套图像采集系统、两台加油装置、以及设置在现场的控制箱和位于中心控制室内的工控机和显示器;该自动加油方法及相配套的系统能够准确判断出需要加油的台车轮,并在加油车在与烧结机台车同步运行的过程中实现注油作业,作
烧结机台车车轮机器手自动加脂装置、控制方法及系统.pdf
本申请公开了烧结机台车车轮机器手自动加脂装置、控制方法及系统。其中,烧结机台车车轮机器手自动加脂控制方法,通过判断加脂装置与车轮接触产生的压力值是否属于压力安全范围,以及判断加脂装置与车轮间的距离值是否属于距离安全范围,来确定加脂装置与加脂孔是否持续、有效地连接。如果所述压力值属于所述压力安全范围且所述距离值属于所述距离安全范围,确定加脂装置与加脂孔连接有效,此时,控制加脂装置加脂,能够保证加脂过程顺利进行。
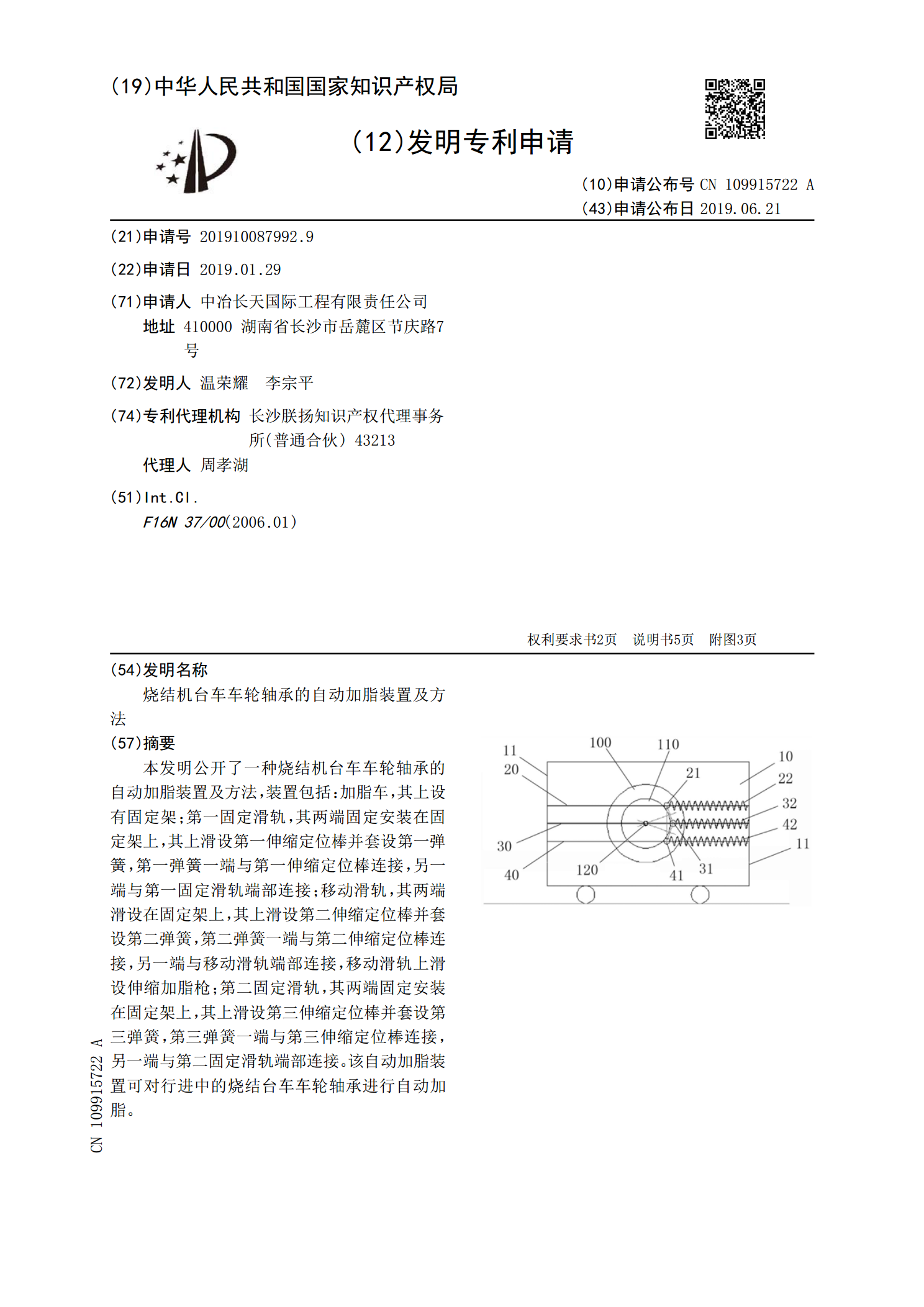
烧结机台车车轮轴承的自动加脂装置及方法.pdf
本发明公开了一种烧结机台车车轮轴承的自动加脂装置及方法,装置包括:加脂车,其上设有固定架;第一固定滑轨,其两端固定安装在固定架上,其上滑设第一伸缩定位棒并套设第一弹簧,第一弹簧一端与第一伸缩定位棒连接,另一端与第一固定滑轨端部连接;移动滑轨,其两端滑设在固定架上,其上滑设第二伸缩定位棒并套设第二弹簧,第二弹簧一端与第二伸缩定位棒连接,另一端与移动滑轨端部连接,移动滑轨上滑设伸缩加脂枪;第二固定滑轨,其两端固定安装在固定架上,其上滑设第三伸缩定位棒并套设第三弹簧,第三弹簧一端与第三伸缩定位棒连接,另一端与第
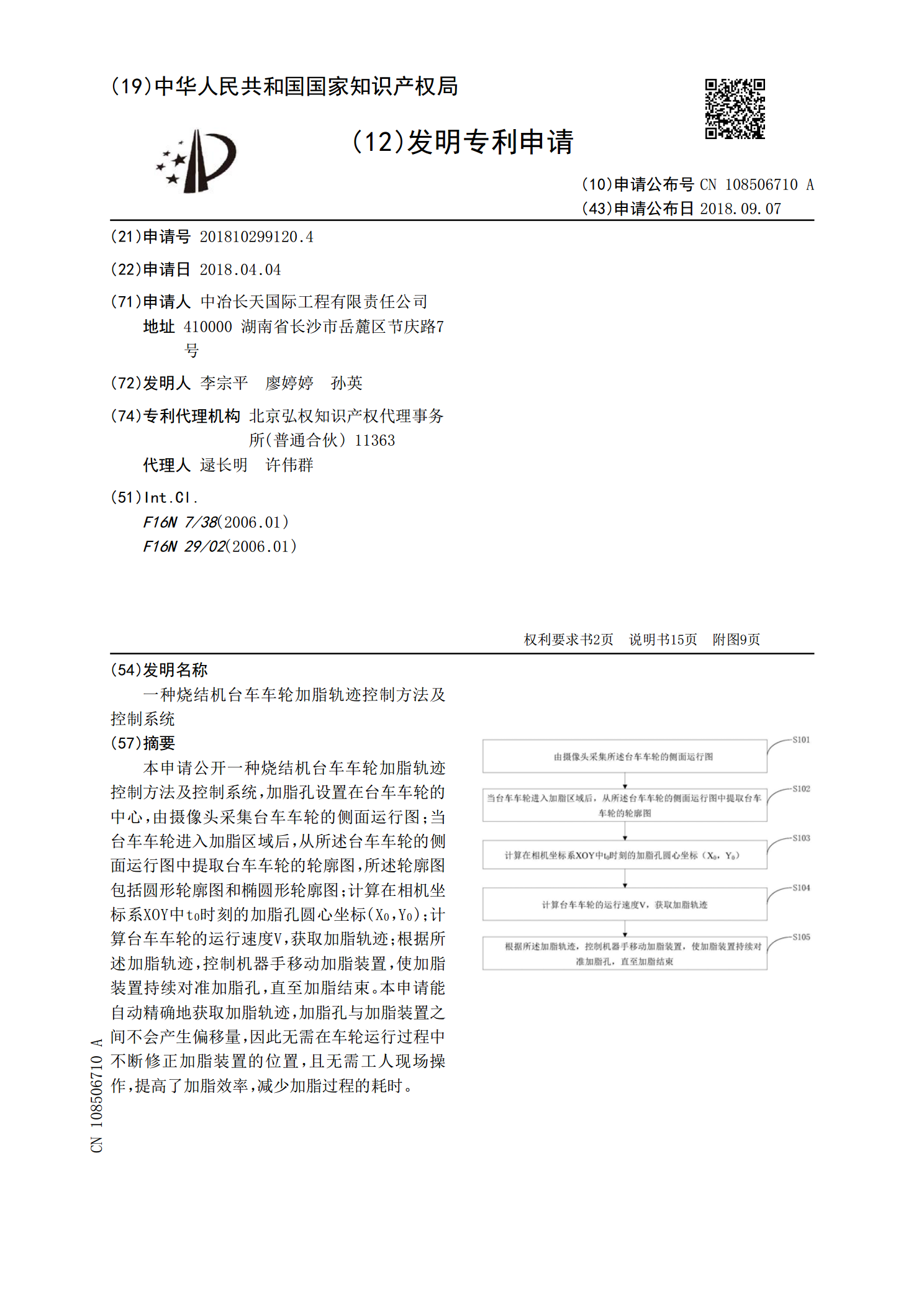
一种烧结机台车车轮加脂轨迹控制方法及控制系统.pdf
本申请公开一种烧结机台车车轮加脂轨迹控制方法及控制系统,加脂孔设置在台车车轮的中心,由摄像头采集台车车轮的侧面运行图;当台车车轮进入加脂区域后,从所述台车车轮的侧面运行图中提取台车车轮的轮廓图,所述轮廓图包括圆形轮廓图和椭圆形轮廓图;计算在相机坐标系XOY中t