
物体轮廓提取方法及系统和物体轮廓预测方法及系统.pdf

白真****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
物体轮廓提取方法及系统和物体轮廓预测方法及系统.pdf
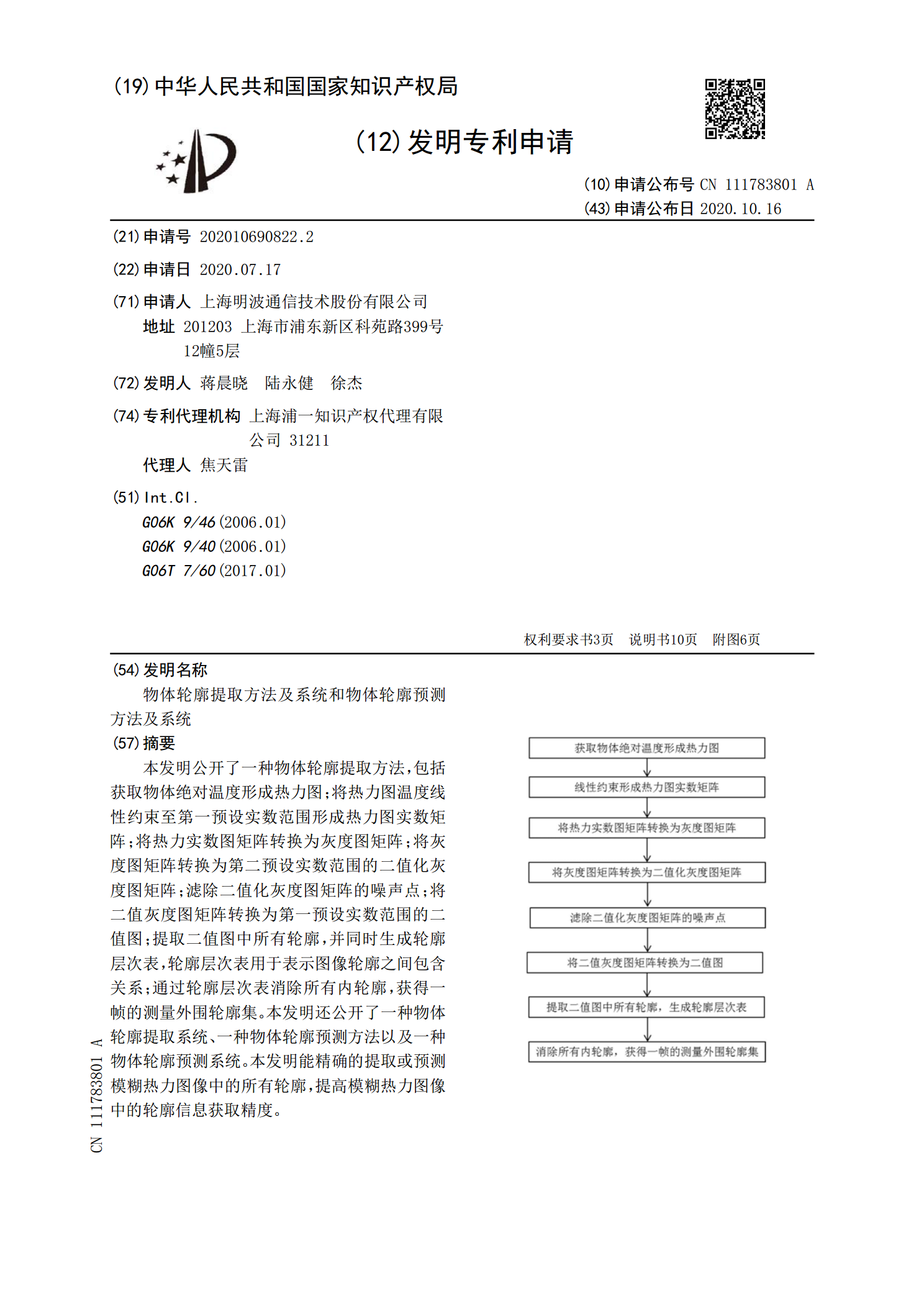
本发明公开了一种物体轮廓提取方法,包括获取物体绝对温度形成热力图;将热力图温度线性约束至第一预设实数范围形成热力图实数矩阵;将热力实数图矩阵转换为灰度图矩阵;将灰度图矩阵转换为第二预设实数范围的二值化灰度图矩阵;滤除二值化灰度图矩阵的噪声点;将二值灰度图矩阵转换为第一预设实数范围的二值图;提取二值图中所有轮廓,并同时生成轮廓层次表,轮廓层次表用于表示图像轮廓之间包含关系;通过轮廓层次表消除所有内轮廓,获得一帧的测量外围轮廓集。本发明还公开了一种物体轮廓提取系统、一种物体轮廓预测方法以及一种物体轮廓预测系统

轮廓校正方法和系统以及轮廓提取方法和系统.pdf
本发明公开了一种轮廓校正方法和系统,用于通过将每个像素标记为人或者背景从而校正从图像中提取出的人的轮廓。目标区域中的像素通过以下步骤被校正:通过利用人的直方图和背景直方图来计算第一连接成本的步骤;对于在目标区域中的每个像素,像素的第二连接成本被计算出来的步骤;以及校正步骤,其中顶点是目标区域中的像素且顶点之间的边缘是第一连接成本和第二连接成本的图被制作出,且最小割被计算出来,并基于所述最小割,在目标区域中的像素被重新标记以便校正轮廓。更进一步地,一种轮廓提取方法和系统被公开。
基于稀疏表示的物体轮廓提取方法.pdf
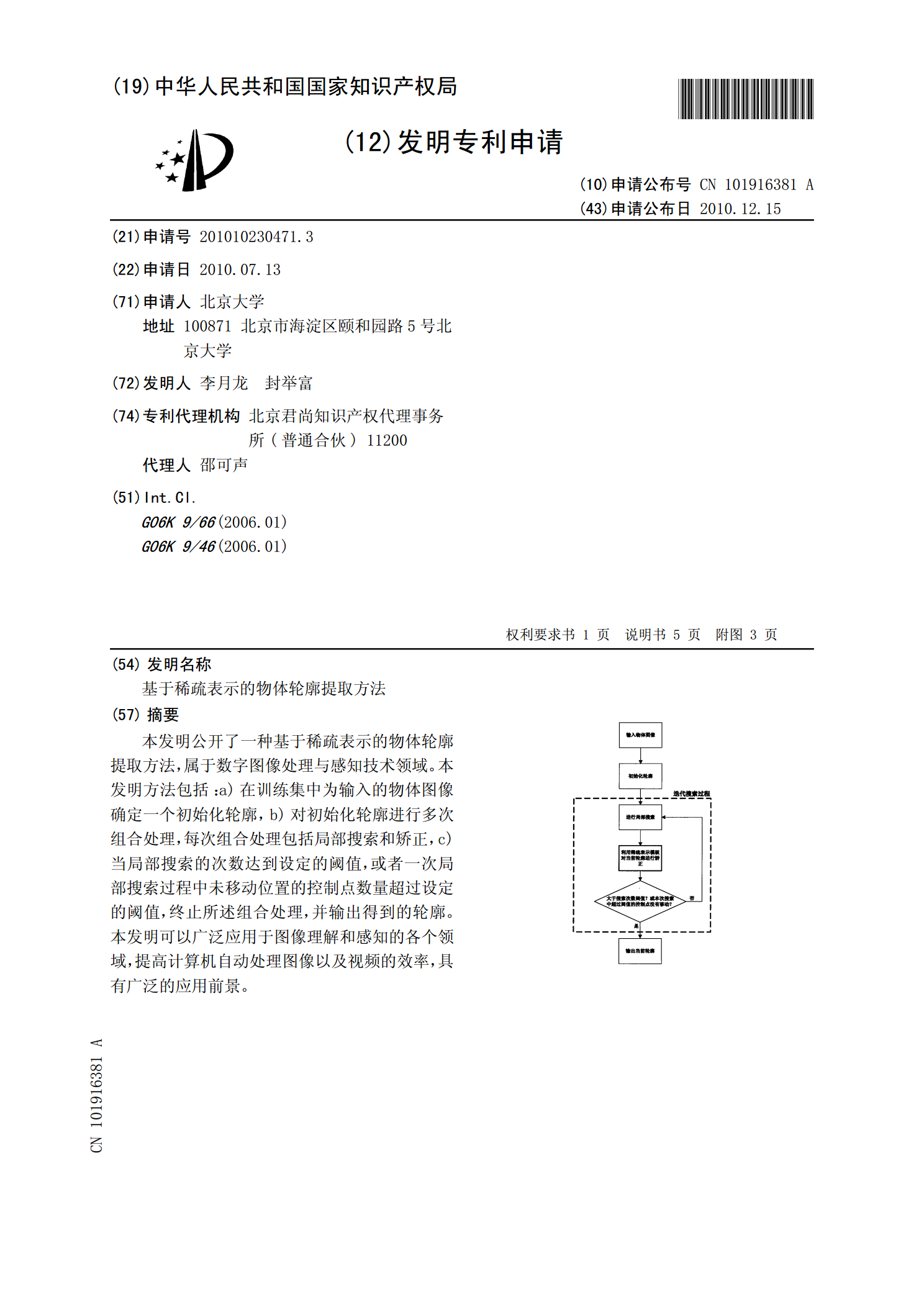
本发明公开了一种基于稀疏表示的物体轮廓提取方法,属于数字图像处理与感知技术领域。本发明方法包括:a)在训练集中为输入的物体图像确定一个初始化轮廓,b)对初始化轮廓进行多次组合处理,每次组合处理包括局部搜索和矫正,c)当局部搜索的次数达到设定的阈值,或者一次局部搜索过程中未移动位置的控制点数量超过设定的阈值,终止所述组合处理,并输出得到的轮廓。本发明可以广泛应用于图像理解和感知的各个领域,提高计算机自动处理图像以及视频的效率,具有广泛的应用前景。
图像轮廓提取方法和系统.pdf
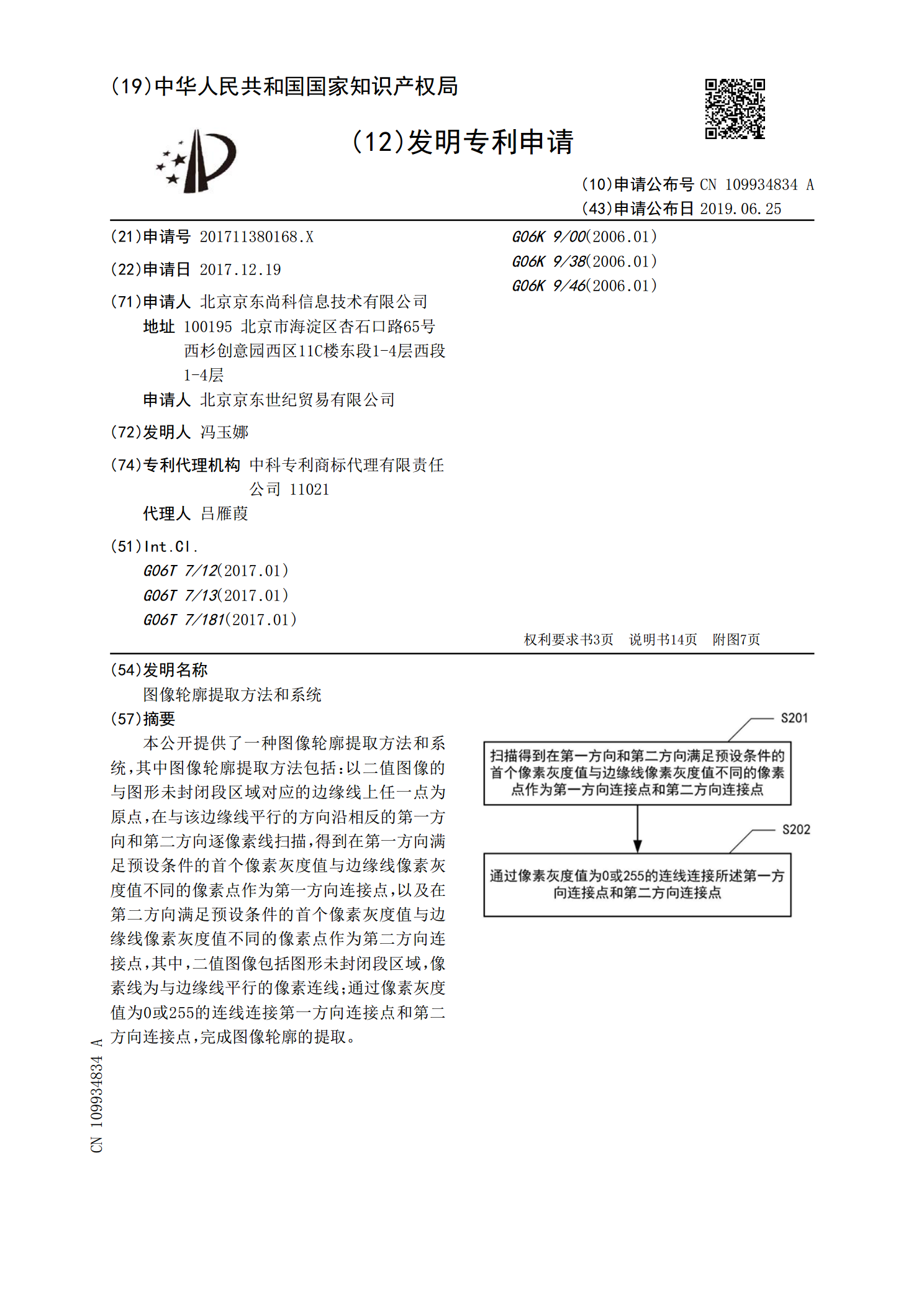
本公开提供了一种图像轮廓提取方法和系统,其中图像轮廓提取方法包括:以二值图像的与图形未封闭段区域对应的边缘线上任一点为原点,在与该边缘线平行的方向沿相反的第一方向和第二方向逐像素线扫描,得到在第一方向满足预设条件的首个像素灰度值与边缘线像素灰度值不同的像素点作为第一方向连接点,以及在第二方向满足预设条件的首个像素灰度值与边缘线像素灰度值不同的像素点作为第二方向连接点,其中,二值图像包括图形未封闭段区域,像素线为与边缘线平行的像素连线;通过像素灰度值为0或255的连线连接第一方向连接点和第二方向连接点,完成

一种物体轮廓的测量系统及方法.pdf
本发明公开了一种物体轮廓测量系统和方法,该系统包括:控制模块、位移传感器模块、影像模块和支撑模块,其中:支撑模块用于调整图像检测视场;位移传感器模块固定在支撑模块上,用于检测被测物体处于视场外部分上的多个测量采样点的位移数据,并将数据发给控制模块;影像模块采集被测物体视场内可见部分的图像和传感器偏转角度图像,并将图像发给控制模块;控制模块对采集数据进行处理,得到被测物体的形变数据和轮廓参数。本发明结合接触式测量和非接触式测量方法,利用传感器的测量数值和传感器偏转角度构成测量点极坐标,并利用多个测量点的极坐