
基于改进区域双边平滑的低速目标检测方法.pdf

是秋****写意

1/9
2/9
3/9
4/9
5/9
6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于改进区域双边平滑的低速目标检测方法.pdf
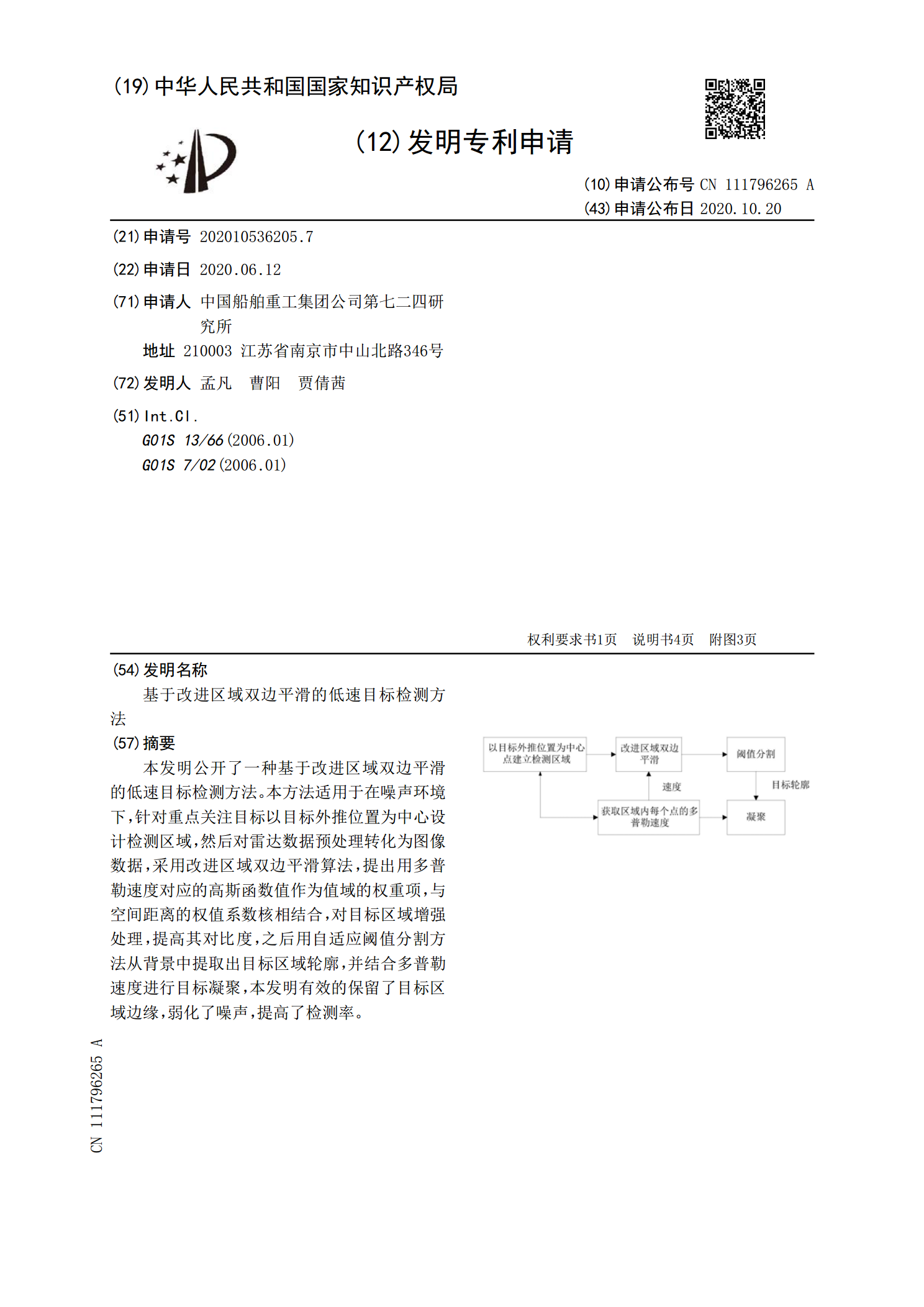
本发明公开了一种基于改进区域双边平滑的低速目标检测方法。本方法适用于在噪声环境下,针对重点关注目标以目标外推位置为中心设计检测区域,然后对雷达数据预处理转化为图像数据,采用改进区域双边平滑算法,提出用多普勒速度对应的高斯函数值作为值域的权重项,与空间距离的权值系数核相结合,对目标区域增强处理,提高其对比度,之后用自适应阈值分割方法从背景中提取出目标区域轮廓,并结合多普勒速度进行目标凝聚,本发明有效的保留了目标区域边缘,弱化了噪声,提高了检测率。

基于双边滤波改进的点云平滑算法.docx
基于双边滤波改进的点云平滑算法摘要点云数据平滑是点云处理中的重要任务之一,它可用于去除噪声、填补缺失数据以及改善点云质量。当前最常用的点云平滑方法之一是双边滤波,它能够在去除噪声的同时保留点云的细节信息。然而,传统的双边滤波算法在处理大规模的点云数据时存在计算复杂度高和运行速度慢的问题。为了解决这一问题,本文提出了一种基于双边滤波改进的点云平滑算法。首先,本文对传统的双边滤波算法进行了分析与总结,明确了其优点与不足。然后,针对双边滤波算法的运行速度慢的问题,本文提出了一种基于网格化的点云数据处理方法。该方

一种基于改进区域建议网络的目标检测方法.docx
一种基于改进区域建议网络的目标检测方法基于改进区域建议网络的目标检测方法摘要:目标检测是计算机视觉领域的重要研究方向之一。近年来,深度学习技术的快速发展使得目标检测取得了显著的进展。本文提出了一种基于改进区域建议网络的目标检测方法,该方法通过结合多种改进技术,在提高检测准确率的同时,保持了较高的检测速度。1.引言:目标检测作为计算机视觉领域的重要任务之一,广泛应用于人脸识别、自动驾驶、视频监控等领域。目标检测方法可以分为两类:基于区域建议的方法和基于单阶段的方法。基于区域建议的方法通过先生成一系列候选区域

基于多通道杂波图的低速目标检测方法.pdf
本发明公开一种基于多通道杂波图的低速目标检测方法,主要解决现有技术中回波较弱情况下低速目标检测性能差的问题。其实现步骤:1)根据雷达多圈扫描数据建立多通道杂波图;2)雷达进行下一圈扫描后,收到该圈的数据;3)根据雷达中该圈扫描数据和多圈扫描数据建立的杂波图进行超杂波检测,得到初始检测结果;4)对多圈扫描建立的杂波图进行更新;5)雷达进行下一圈扫描,收到下一圈扫描数据;6)根据下一圈扫描数据和更新后的杂波图进行超杂波检测,得到最终的检测结果。本发明通过建立多通道杂波图,将目标能量集中在一个多普勒通道,减少了

基于强关联平滑约束的目标检测模型剪枝方法.docx
基于强关联平滑约束的目标检测模型剪枝方法1.内容概要本文档主要介绍了一种基于强关联平滑约束的目标检测模型剪枝方法。我们详细阐述了目标检测模型剪枝的重要性和应用背景,我们分析了现有的目标检测模型剪枝方法的局限性,并提出了一种新的剪枝策略,即基于强关联平滑约束的方法。这种方法通过引入强关联平滑约束条件,实现了对目标检测模型参数的有效剪枝,从而提高了模型的计算效率和检测性能。我们在一个典型的目标检测数据集上进行了实验验证,结果表明所提出的剪枝方法在保持较高检测精度的同时,大幅减少了模型的参数量和计算复杂度。1.