
一种叶轮机械叶片曲面网格化快速生成方法.pdf

飞舟****文章


1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种叶轮机械叶片曲面网格化快速生成方法.pdf
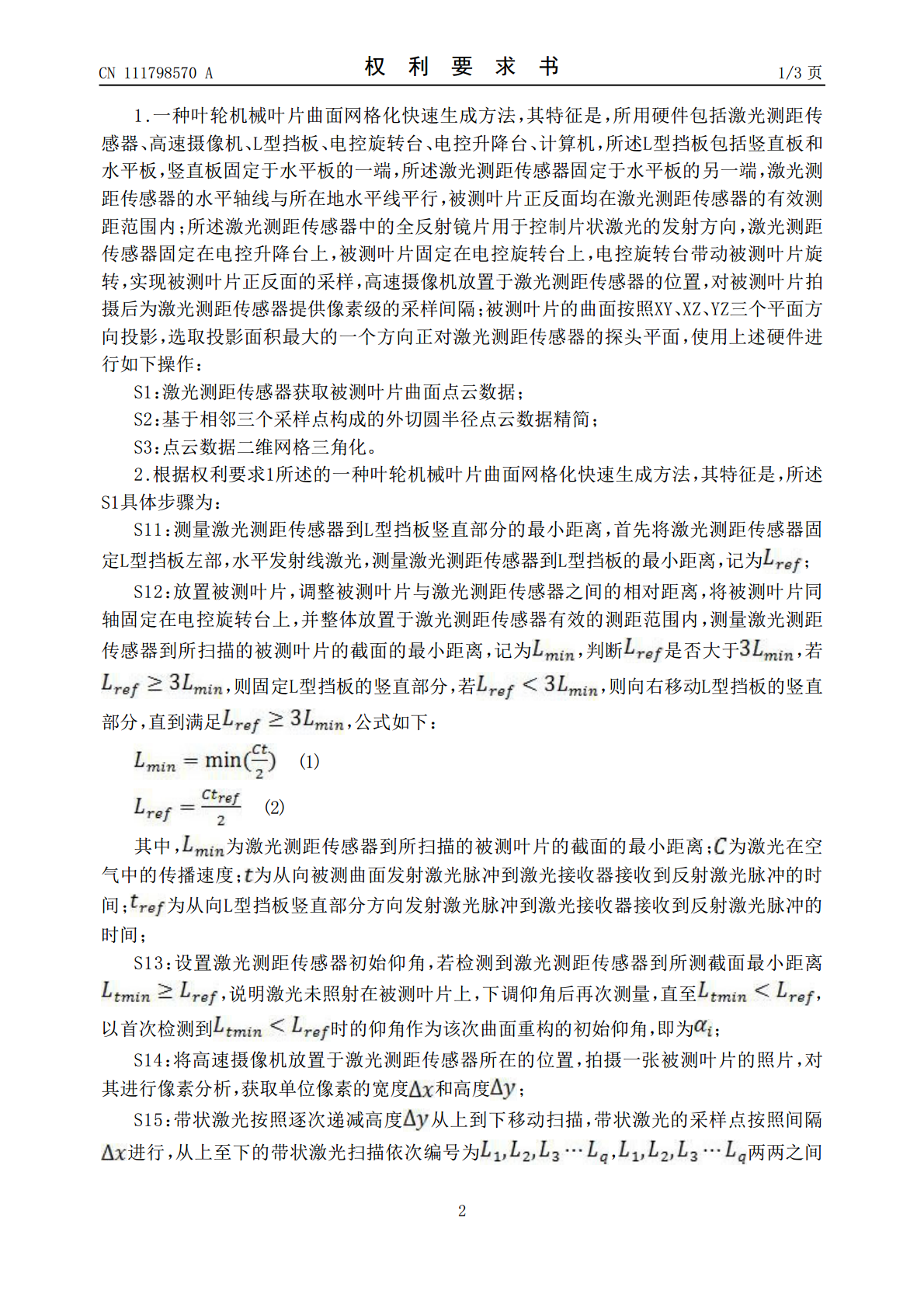
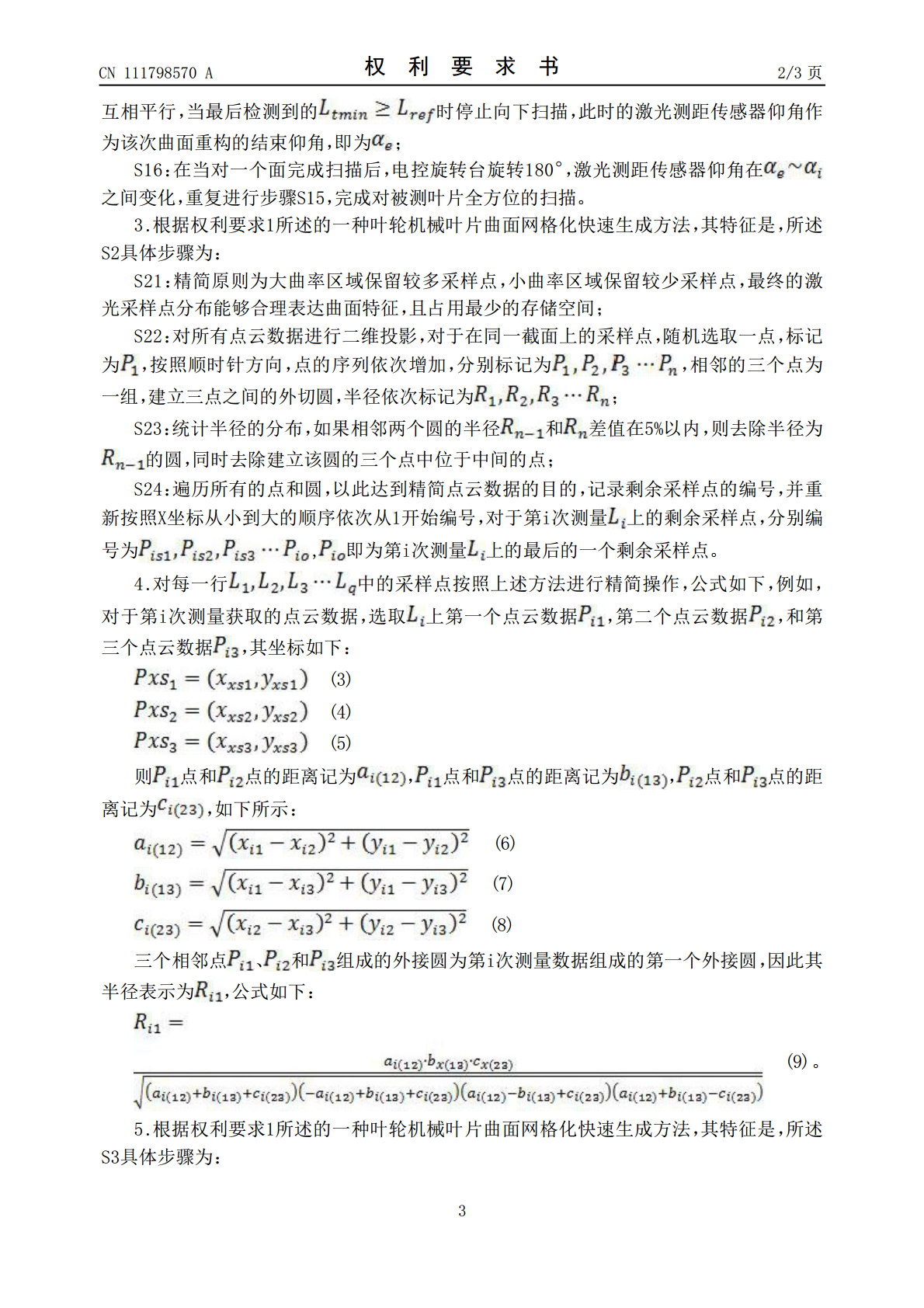
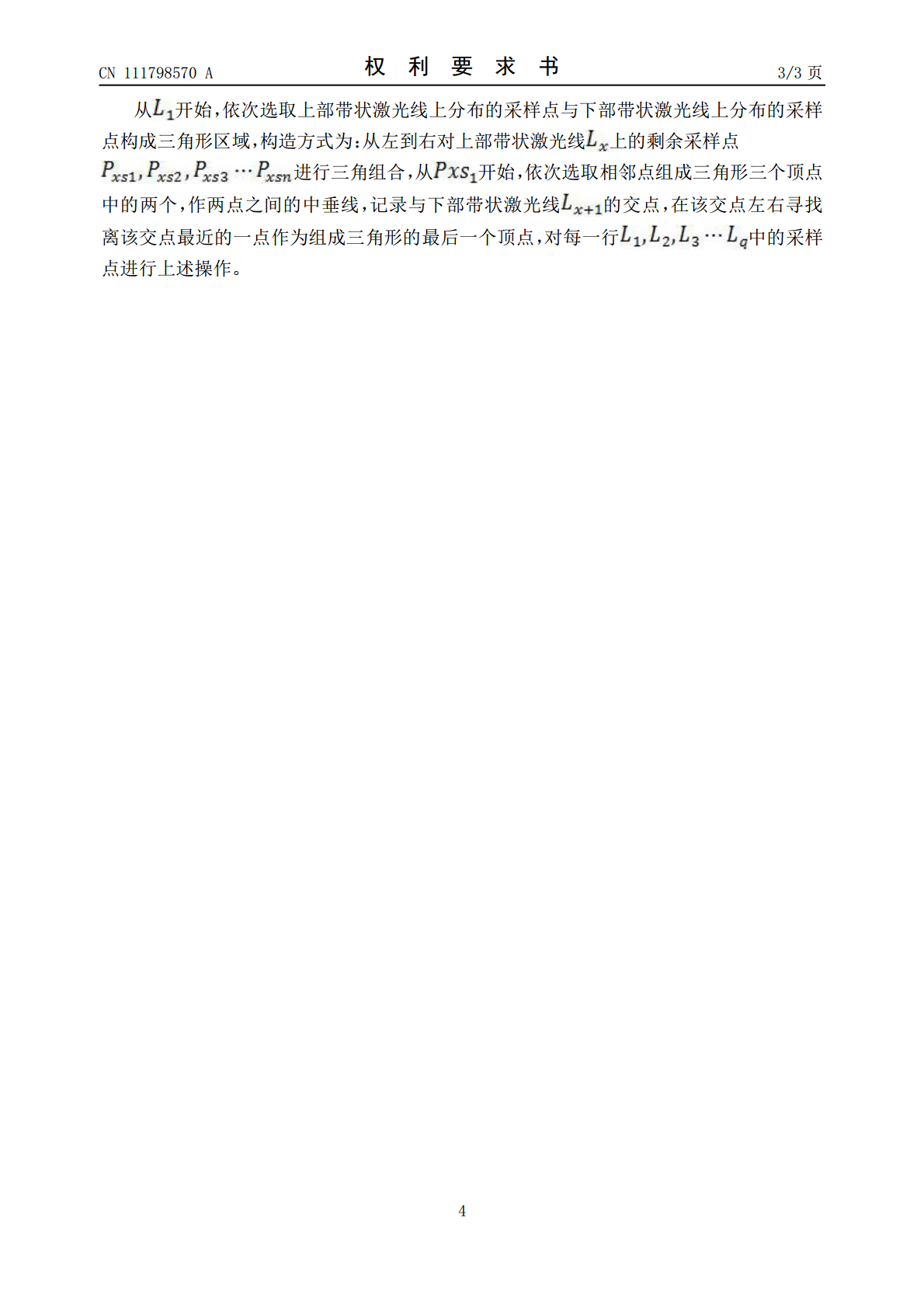
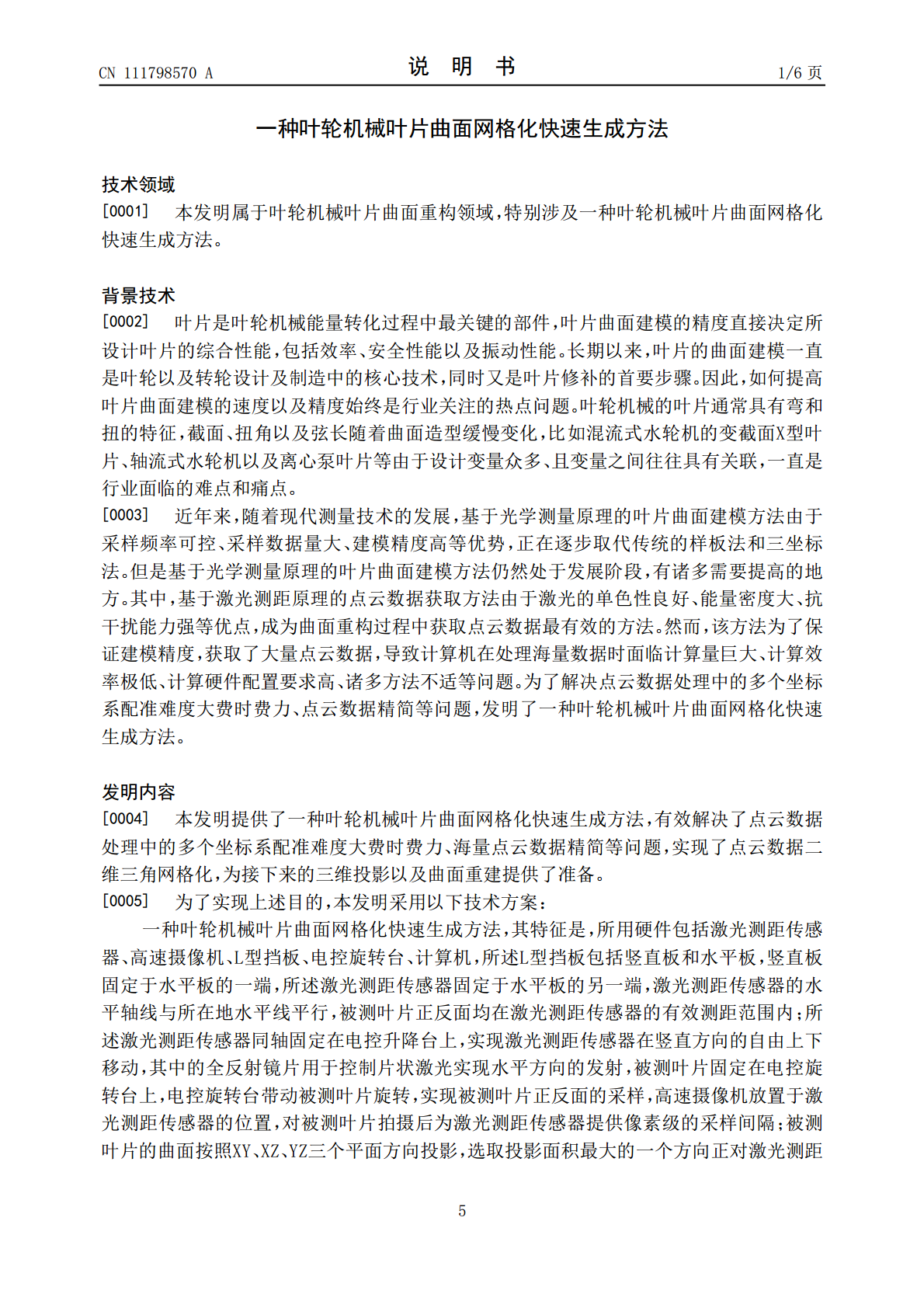
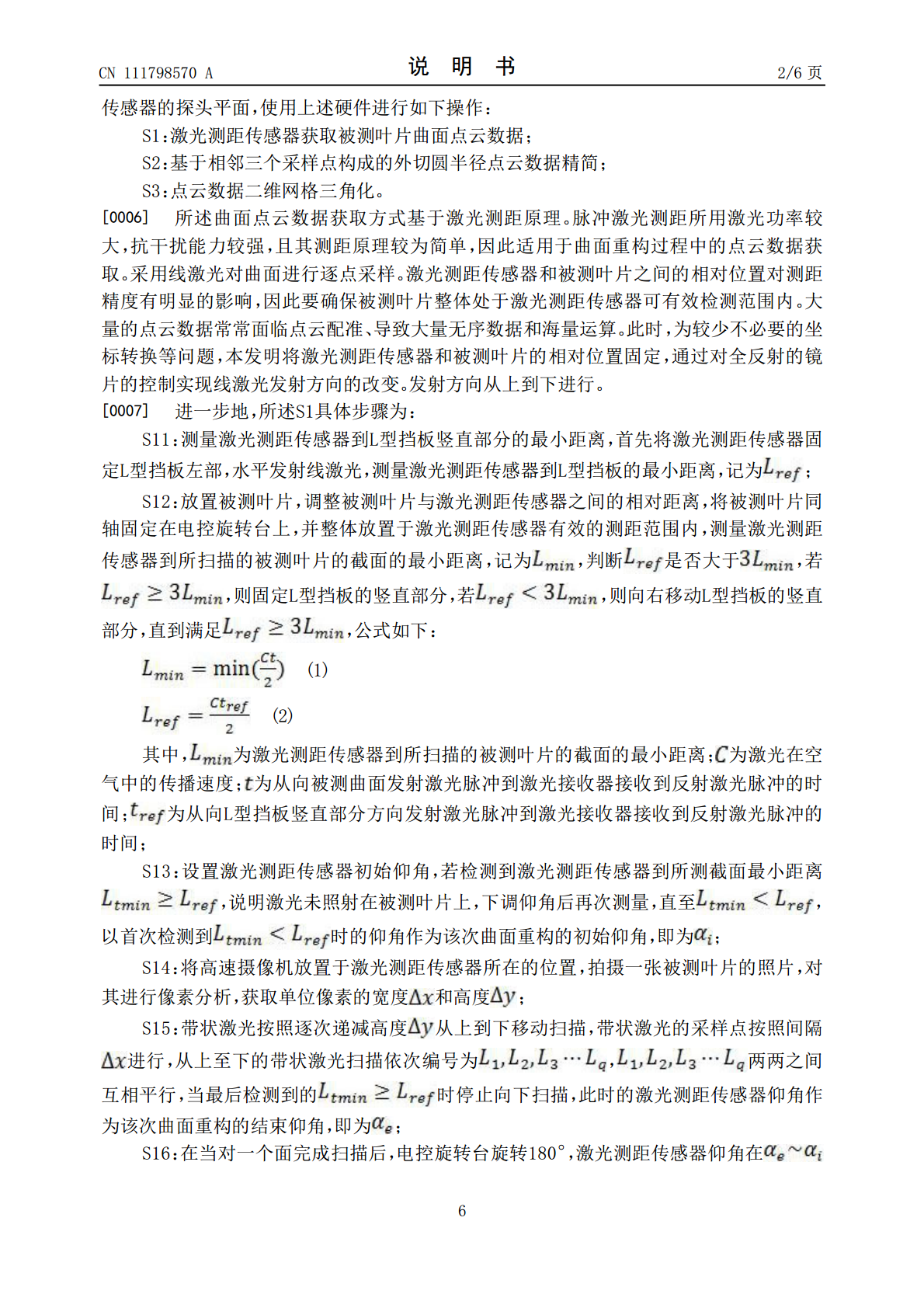
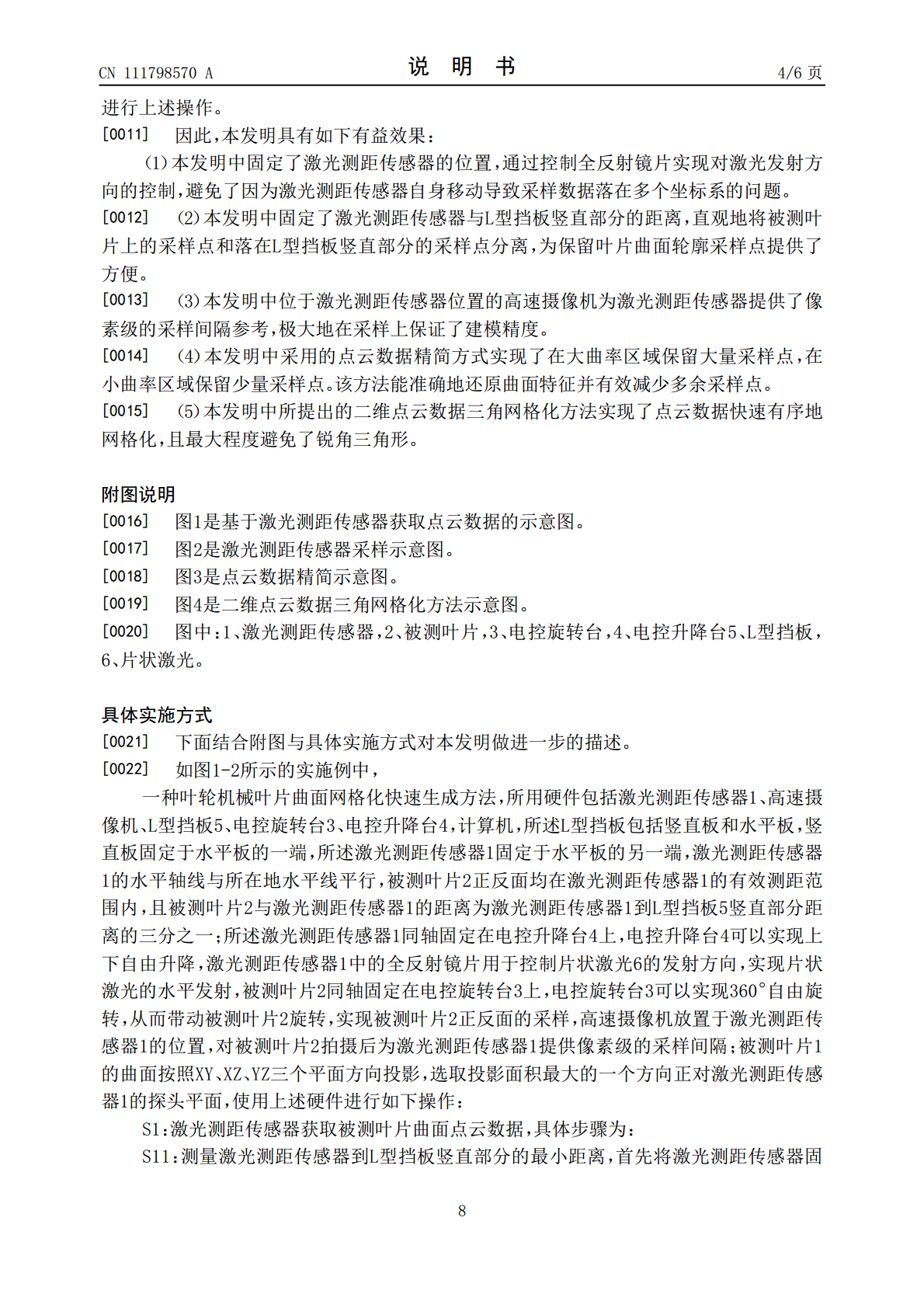
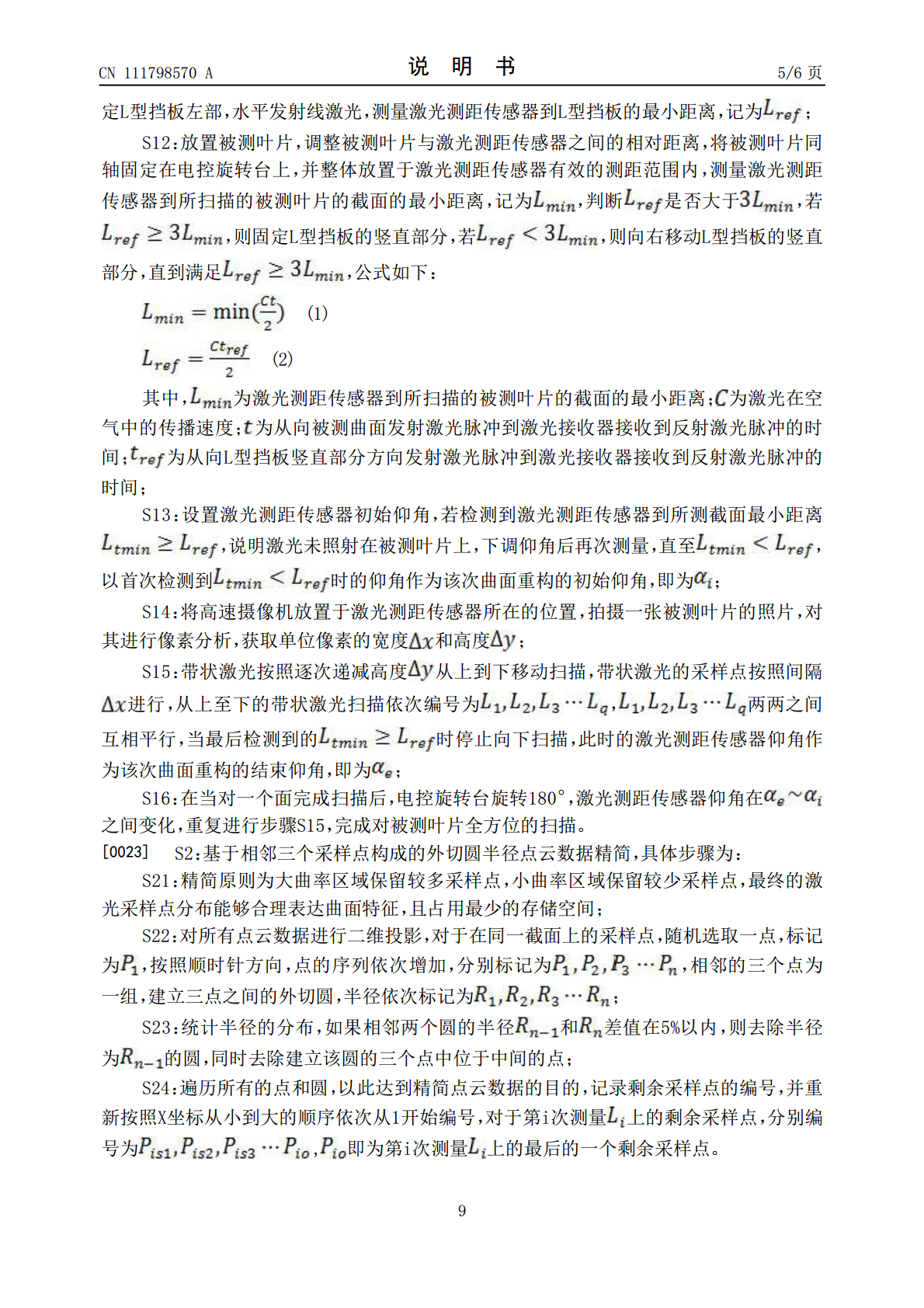
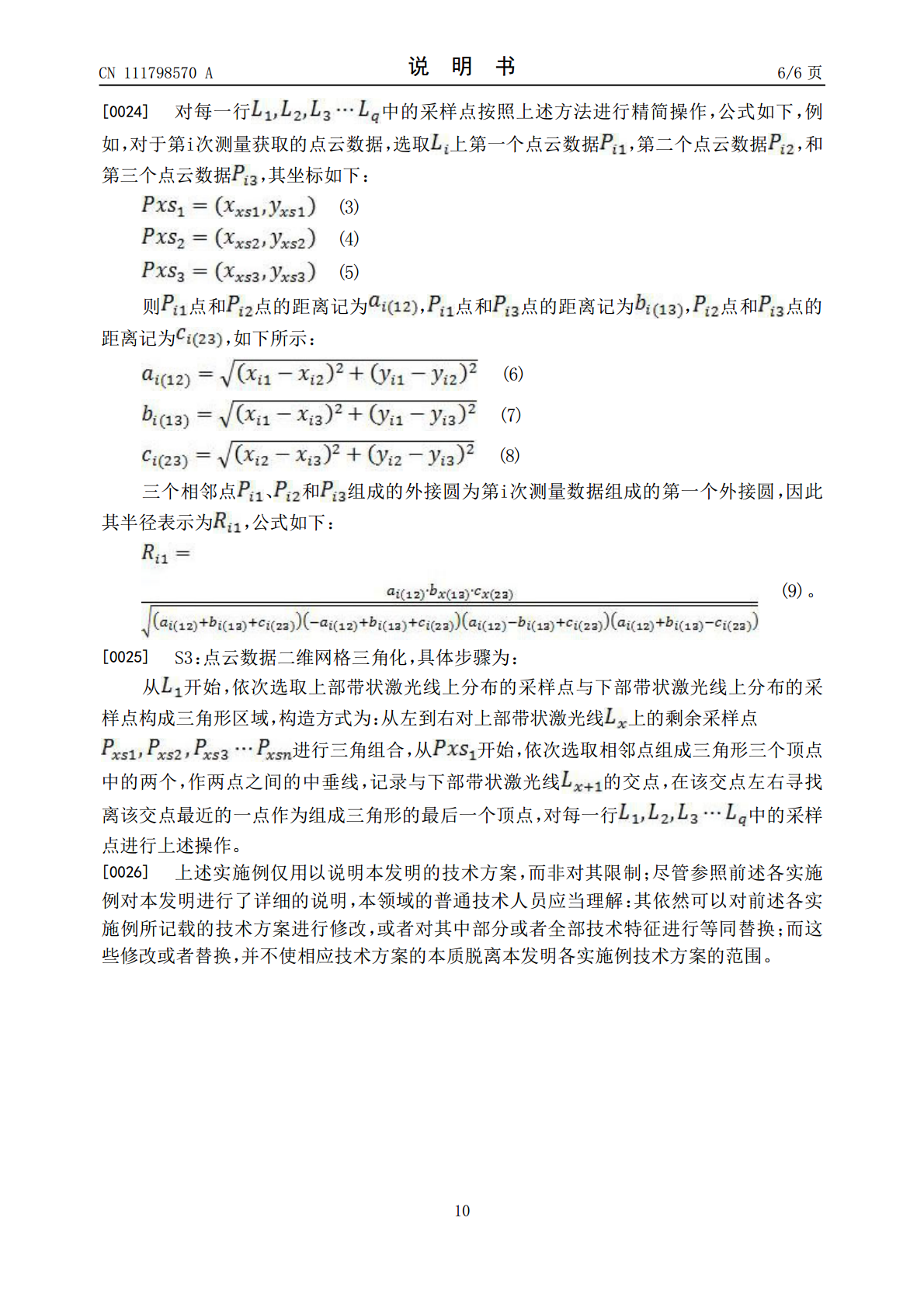
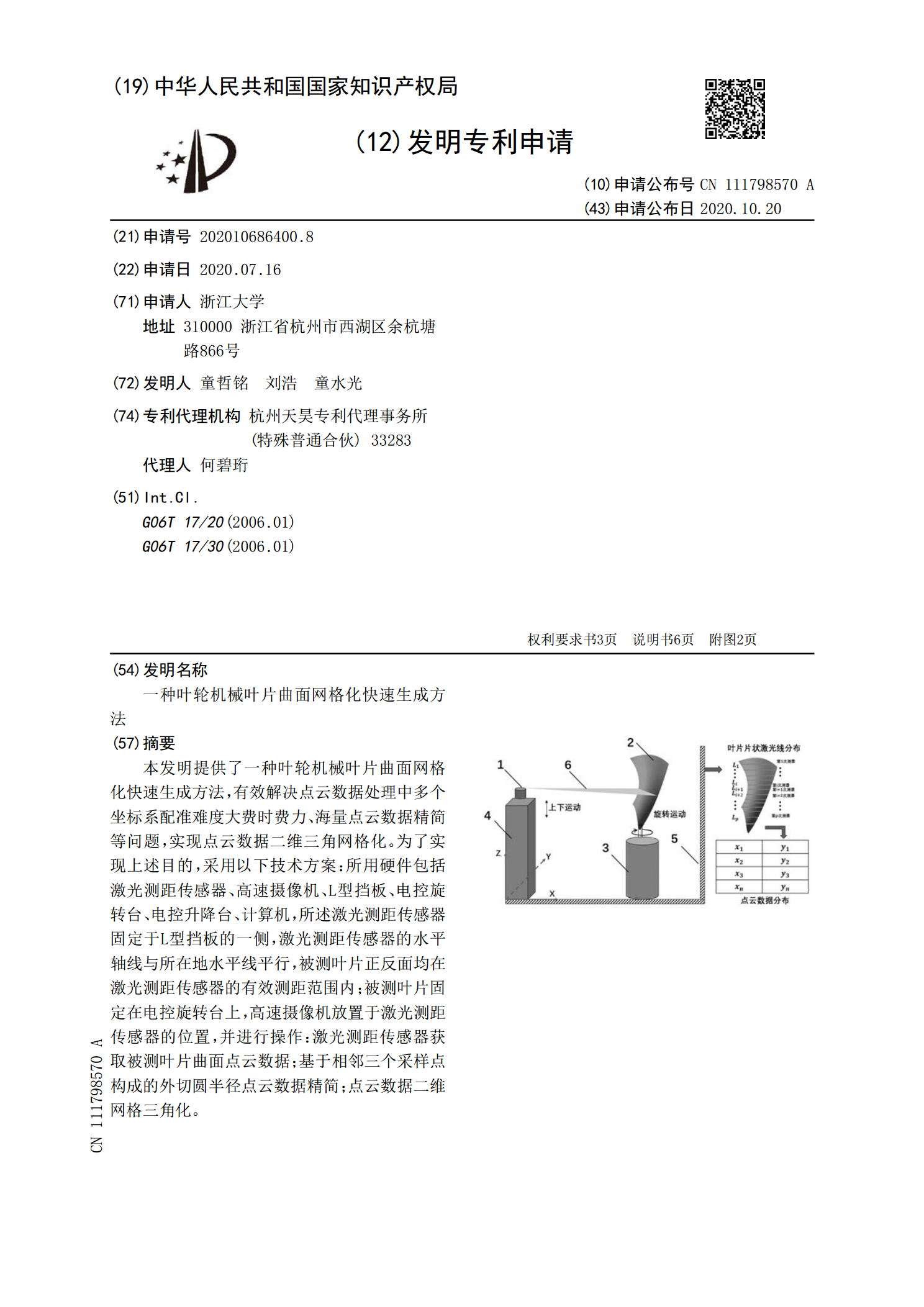
本发明提供了一种叶轮机械叶片曲面网格化快速生成方法,有效解决点云数据处理中多个坐标系配准难度大费时费力、海量点云数据精简等问题,实现点云数据二维三角网格化。为了实现上述目的,采用以下技术方案:所用硬件包括激光测距传感器、高速摄像机、L型挡板、电控旋转台、电控升降台、计算机,所述激光测距传感器固定于L型挡板的一侧,激光测距传感器的水平轴线与所在地水平线平行,被测叶片正反面均在激光测距传感器的有效测距范围内;被测叶片固定在电控旋转台上,高速摄像机放置于激光测距传感器的位置,并进行操作:激光测距传感器获取被测叶
一种基于自由曲面叶片中性面的离心叶轮叶片生成方法.pdf
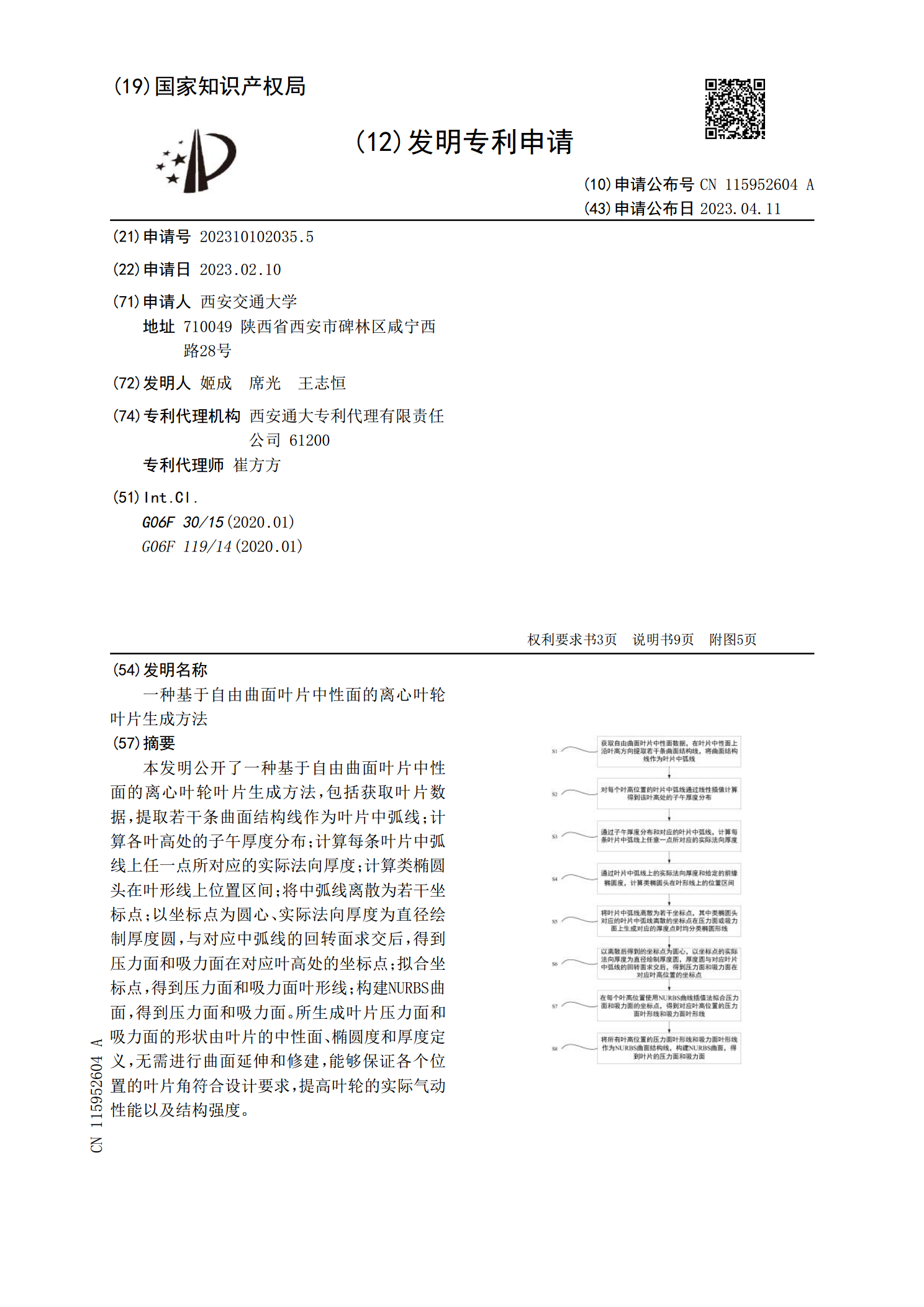
本发明公开了一种基于自由曲面叶片中性面的离心叶轮叶片生成方法,包括获取叶片数据,提取若干条曲面结构线作为叶片中弧线;计算各叶高处的子午厚度分布;计算每条叶片中弧线上任一点所对应的实际法向厚度;计算类椭圆头在叶形线上位置区间;将中弧线离散为若干坐标点;以坐标点为圆心、实际法向厚度为直径绘制厚度圆,与对应中弧线的回转面求交后,得到压力面和吸力面在对应叶高处的坐标点;拟合坐标点,得到压力面和吸力面叶形线;构建NURBS曲面,得到压力面和吸力面。所生成叶片压力面和吸力面的形状由叶片的中性面、椭圆度和厚度定义,无需
一种复杂曲面叶轮叶片的超声震动辅助CMP方法.pdf
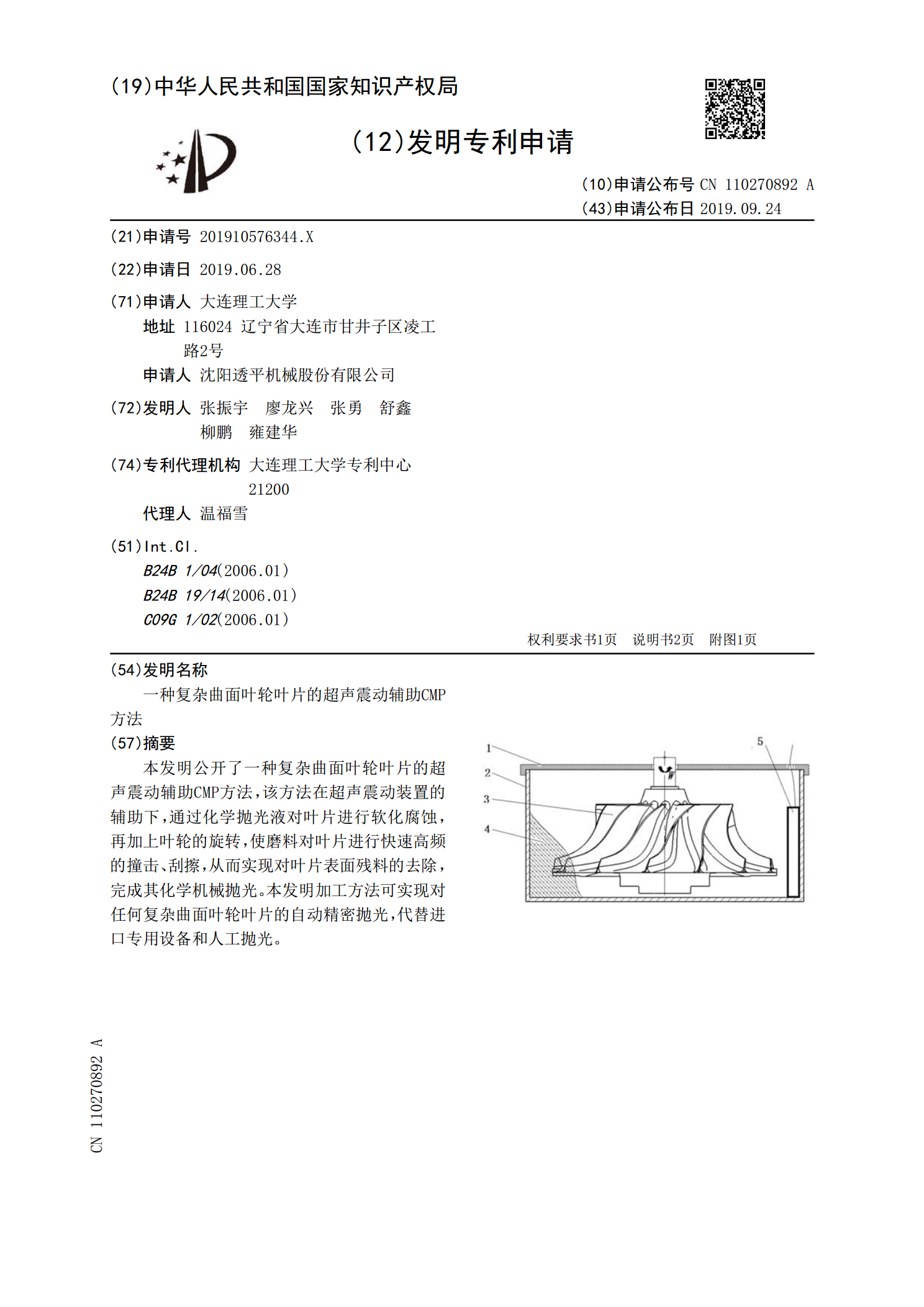
本发明公开了一种复杂曲面叶轮叶片的超声震动辅助CMP方法,该方法在超声震动装置的辅助下,通过化学抛光液对叶片进行软化腐蚀,再加上叶轮的旋转,使磨料对叶片进行快速高频的撞击、刮擦,从而实现对叶片表面残料的去除,完成其化学机械抛光。本发明加工方法可实现对任何复杂曲面叶轮叶片的自动精密抛光,代替进口专用设备和人工抛光。

一种自由曲面自适应网格生成方法.docx
一种自由曲面自适应网格生成方法为题目,写不少于1200的论文摘要自适应网格生成旨在提高计算效率和准确性,特别是在计算领域中。本论文介绍了一种新的自由曲面自适应网格生成方法,该方法基于三角剖分和内插算法,可以在保持曲面几何特性不变的情况下实现自适应网格的生成。本文还介绍了该方法的实现细节和性能分析,结果表明该方法能够快速生成高质量的网格,同时具有良好的扩展性和适用性。关键词:自适应网格;自由曲面;三角剖分;内插算法;计算领域1.引言自适应网格生成是计算领域中广泛使用的一种技术,它可以在提高计算效率的同时提高

自由形态B样条曲面网格生成的参数化方法研究(英文).docx
自由形态B样条曲面网格生成的参数化方法研究(英文)Title:ResearchonParameterizationMethodsforFreeformB-splineSurfaceMeshGenerationAbstract:B-splinesurfaceshavebecomeapopulartoolforrepresentingandmanipulatingfreeformsurfacesinvariousapplicationssuchascomputergraphics,computer-aided