
激光条纹中心的提取方法、装置、电子设备及存储介质.pdf

玉军****la

1/10
2/10
3/10
4/10
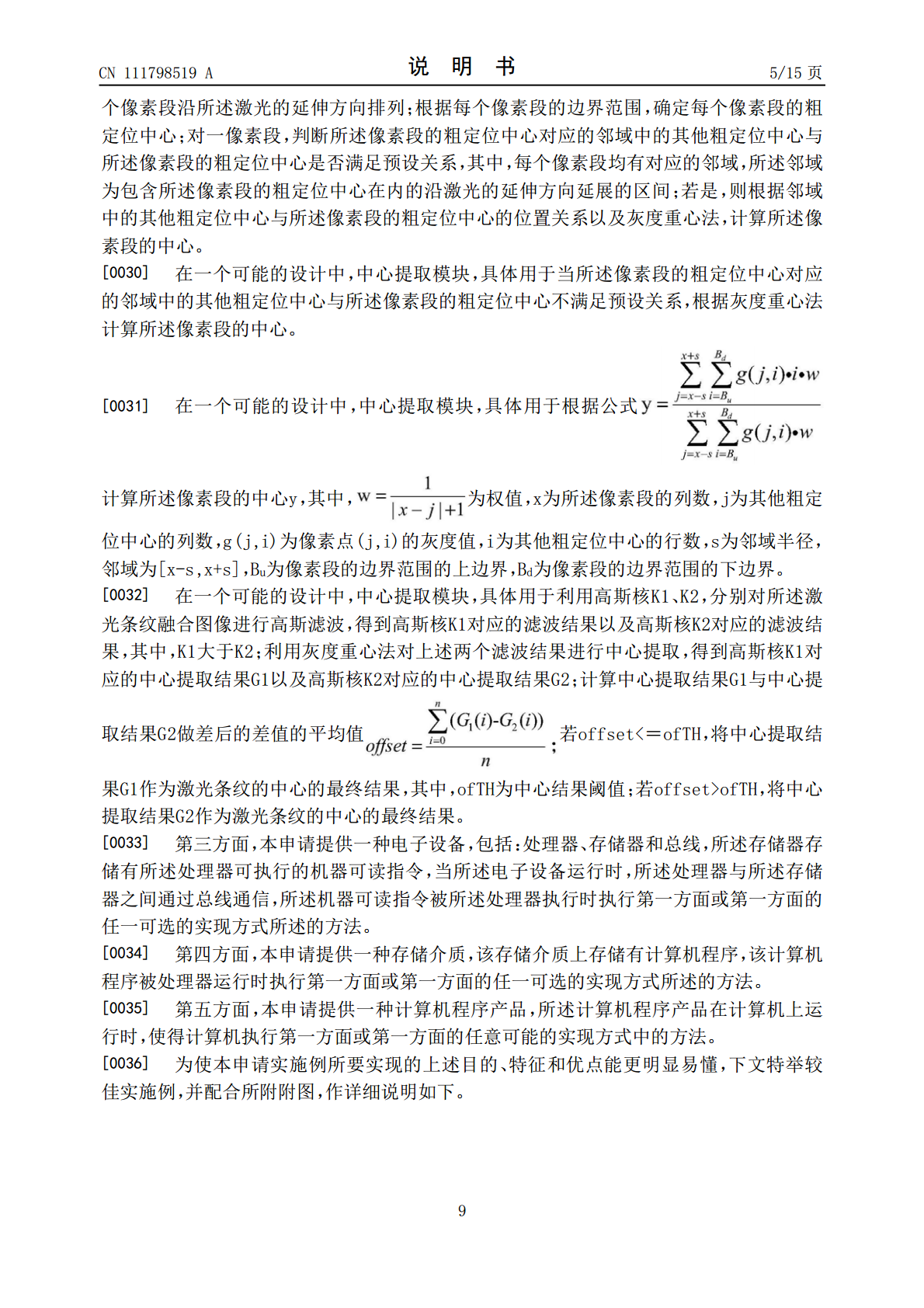
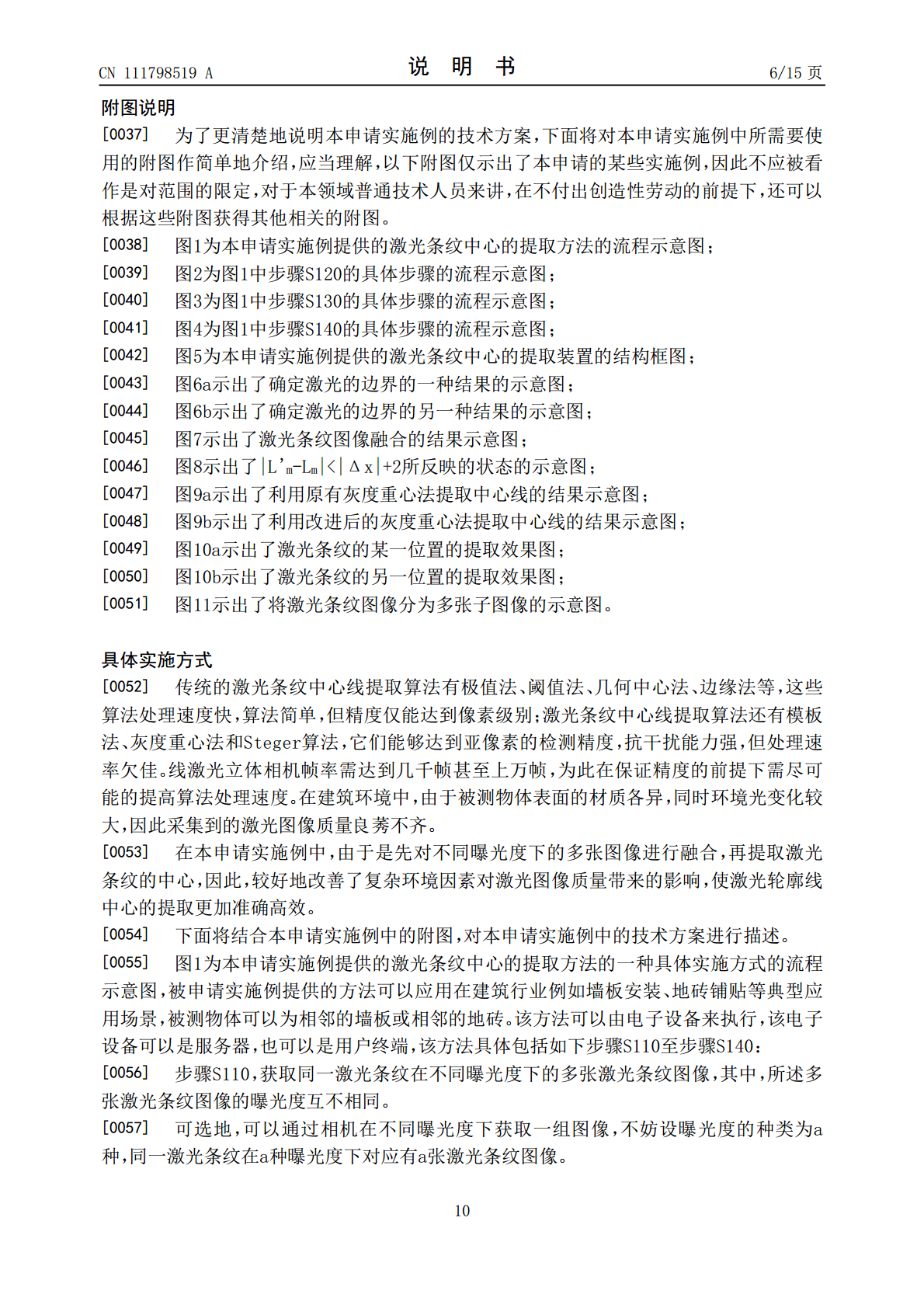
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
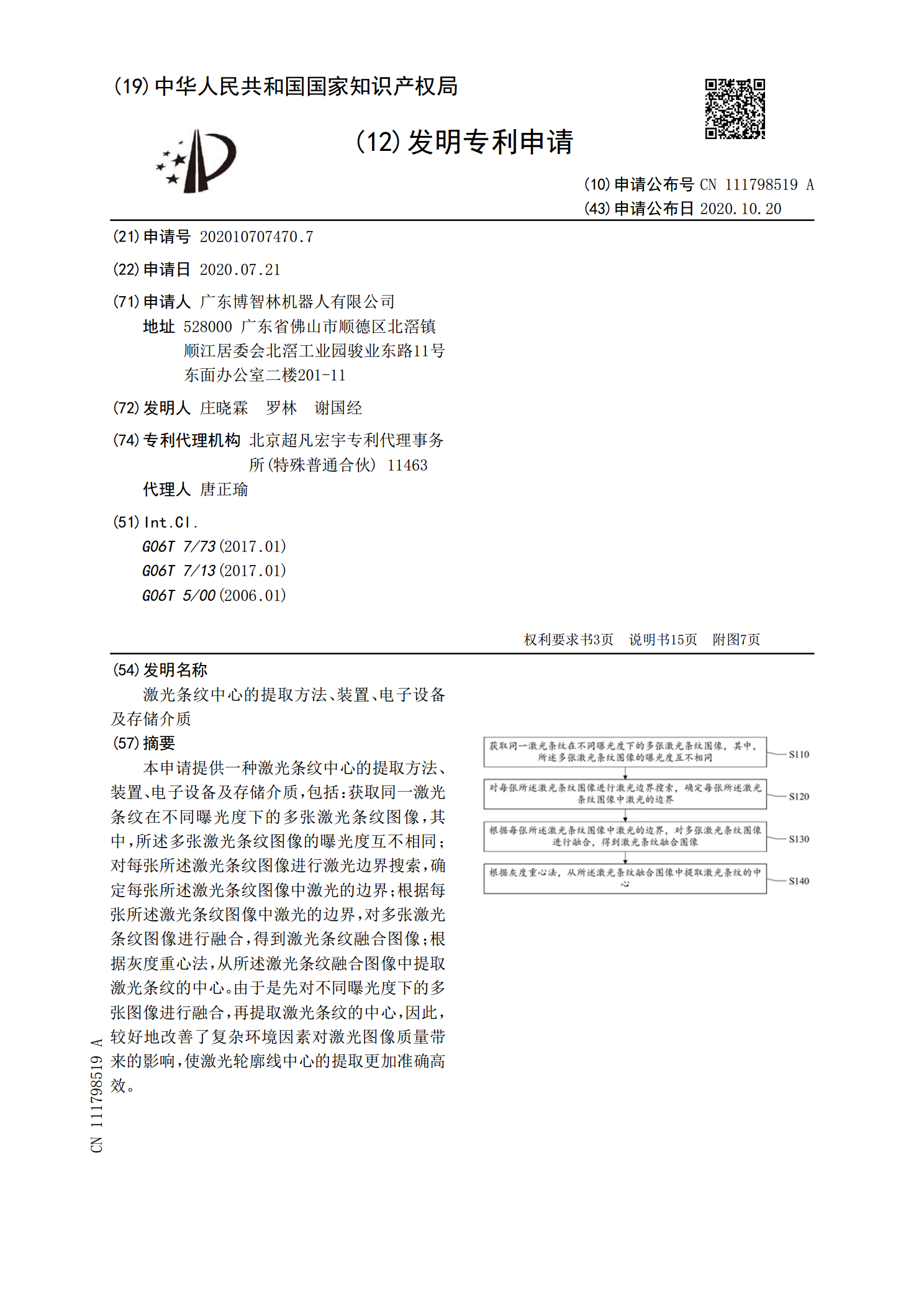
激光条纹中心的提取方法、装置、电子设备及存储介质.pdf
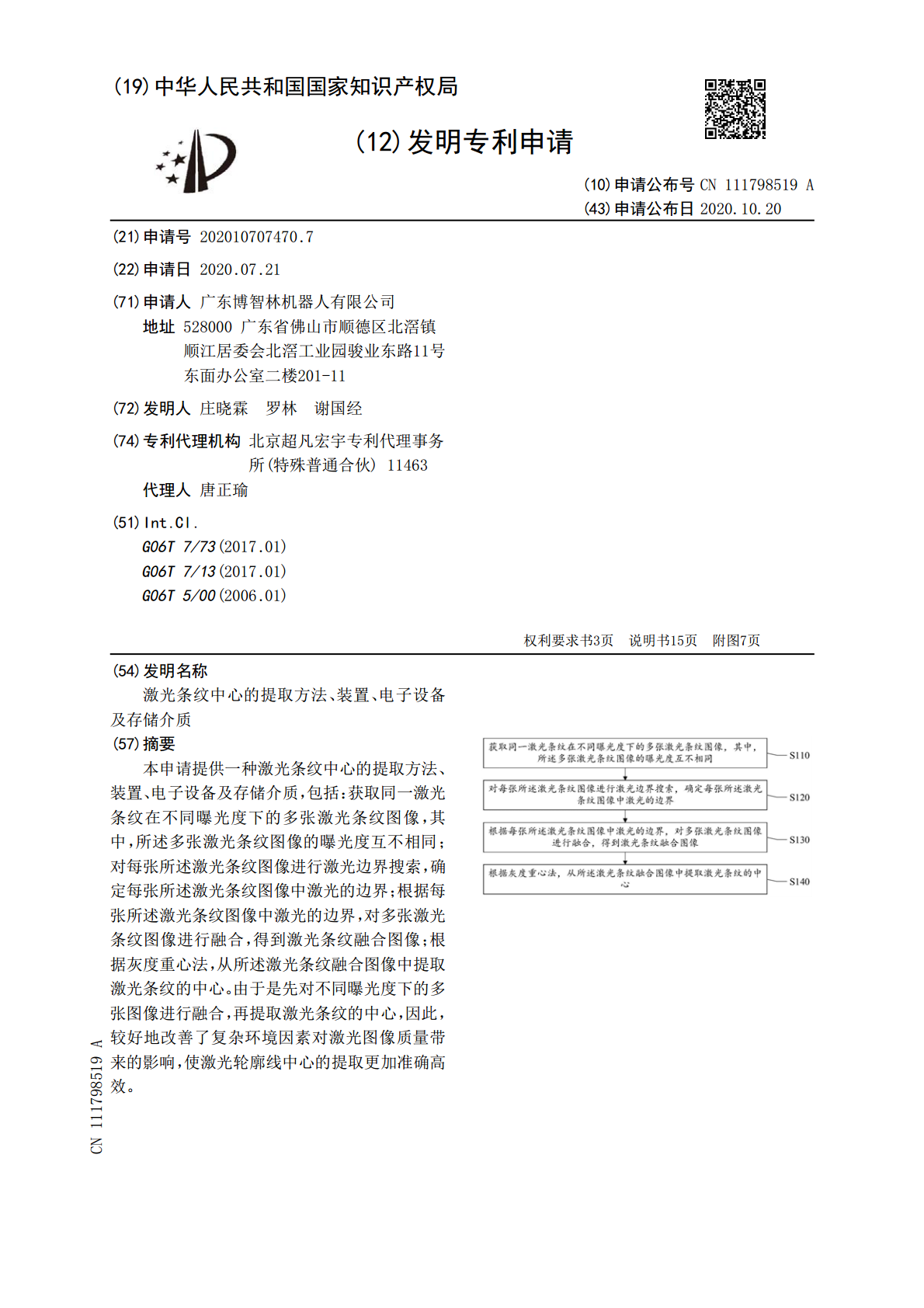
本申请提供一种激光条纹中心的提取方法、装置、电子设备及存储介质,包括:获取同一激光条纹在不同曝光度下的多张激光条纹图像,其中,所述多张激光条纹图像的曝光度互不相同;对每张所述激光条纹图像进行激光边界搜索,确定每张所述激光条纹图像中激光的边界;根据每张所述激光条纹图像中激光的边界,对多张激光条纹图像进行融合,得到激光条纹融合图像;根据灰度重心法,从所述激光条纹融合图像中提取激光条纹的中心。由于是先对不同曝光度下的多张图像进行融合,再提取激光条纹的中心,因此,较好地改善了复杂环境因素对激光图像质量带来的影响,
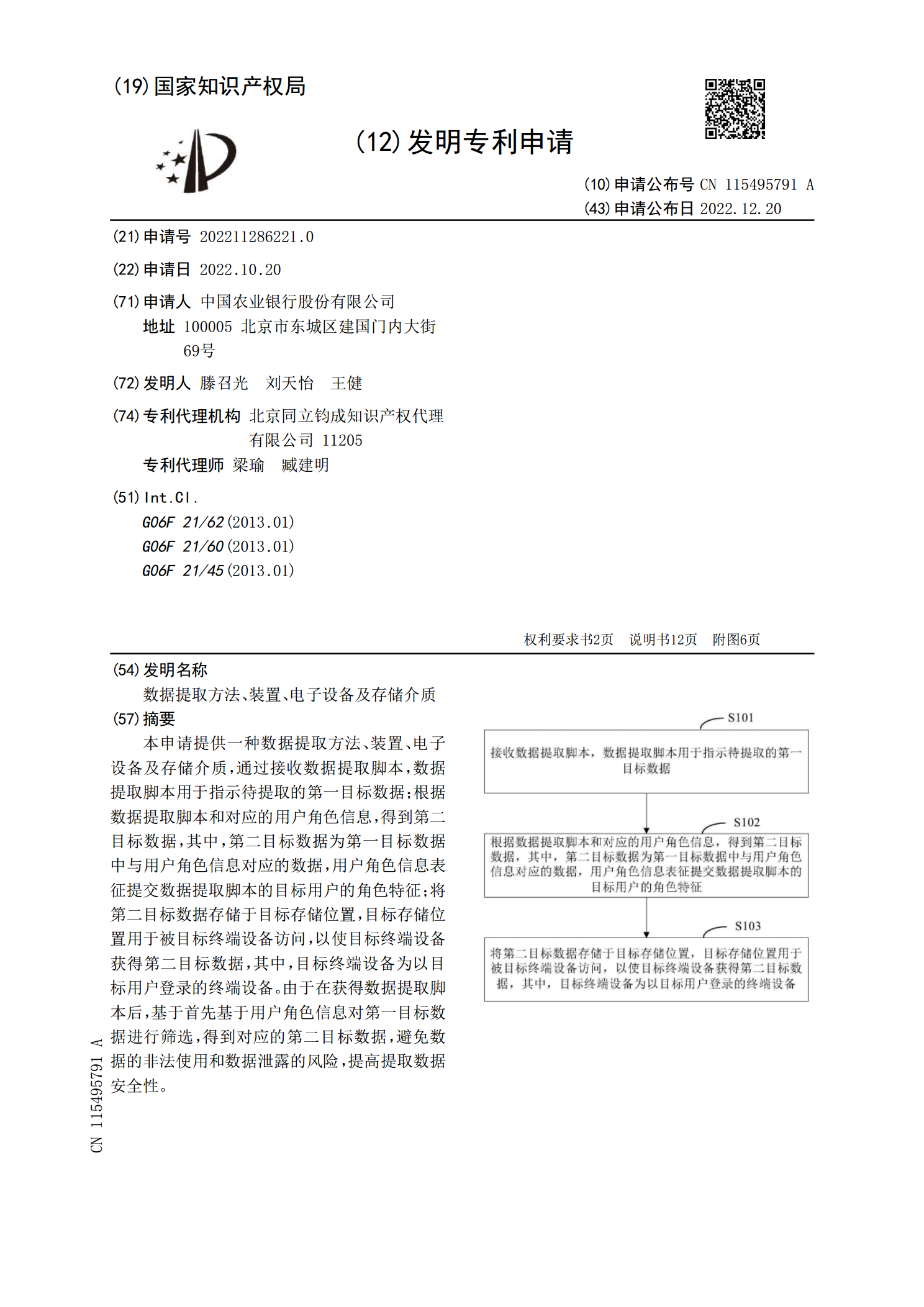
数据提取方法、装置、电子设备及存储介质.pdf
本申请提供一种数据提取方法、装置、电子设备及存储介质,通过接收数据提取脚本,数据提取脚本用于指示待提取的第一目标数据;根据数据提取脚本和对应的用户角色信息,得到第二目标数据,其中,第二目标数据为第一目标数据中与用户角色信息对应的数据,用户角色信息表征提交数据提取脚本的目标用户的角色特征;将第二目标数据存储于目标存储位置,目标存储位置用于被目标终端设备访问,以使目标终端设备获得第二目标数据,其中,目标终端设备为以目标用户登录的终端设备。由于在获得数据提取脚本后,基于首先基于用户角色信息对第一目标数据进行筛选

视频提取方法、装置、电子设备及存储介质.pdf
本发明实施例涉及音视频处理,公开了一种视频提取方法、装置、电子设备及存储介质。本发明中,视频提取方法,包括以下步骤:从游戏音视频中提取游戏音频;生成游戏音频的第一特征值;将第一特征值与预先得到的第二特征值进行匹配;第二特征值是当玩家完成精彩操作触发的第二音频的特征值;若第一特征值与第二特征值匹配成功,则根据第一特征值对应的游戏音频,从游戏音视频中提取与游戏音频对应的游戏视频,得到精彩操作视频。本发明实施例视频提取方法能够快速提取精彩操作视频,降低实现成本。
信息提取的方法、装置、电子设备及存储介质.pdf
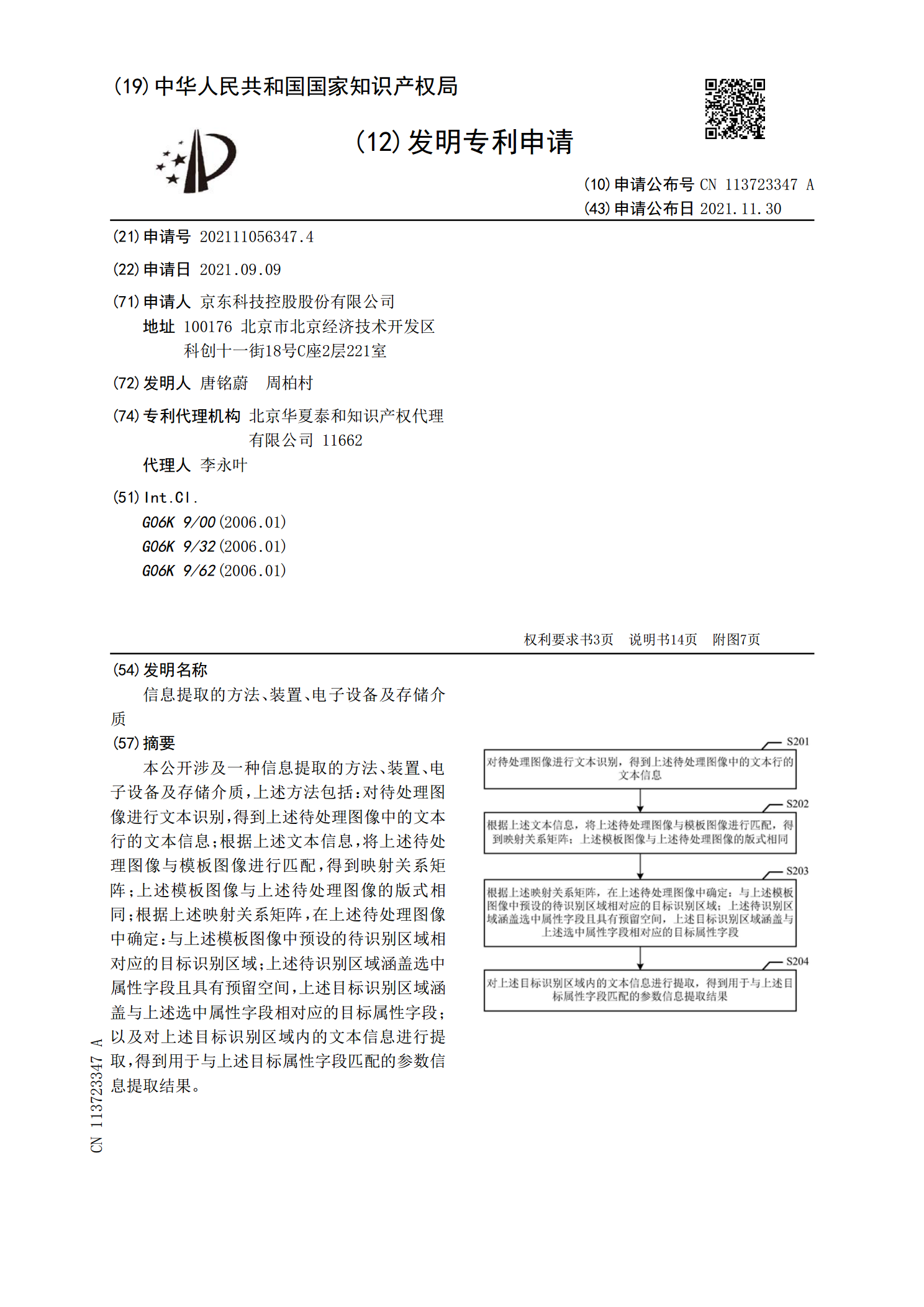
本公开涉及一种信息提取的方法、装置、电子设备及存储介质,上述方法包括:对待处理图像进行文本识别,得到上述待处理图像中的文本行的文本信息;根据上述文本信息,将上述待处理图像与模板图像进行匹配,得到映射关系矩阵;上述模板图像与上述待处理图像的版式相同;根据上述映射关系矩阵,在上述待处理图像中确定:与上述模板图像中预设的待识别区域相对应的目标识别区域;上述待识别区域涵盖选中属性字段且具有预留空间,上述目标识别区域涵盖与上述选中属性字段相对应的目标属性字段;以及对上述目标识别区域内的文本信息进行提取,得到用于与上
信息提取方法、装置、电子设备及存储介质.pdf
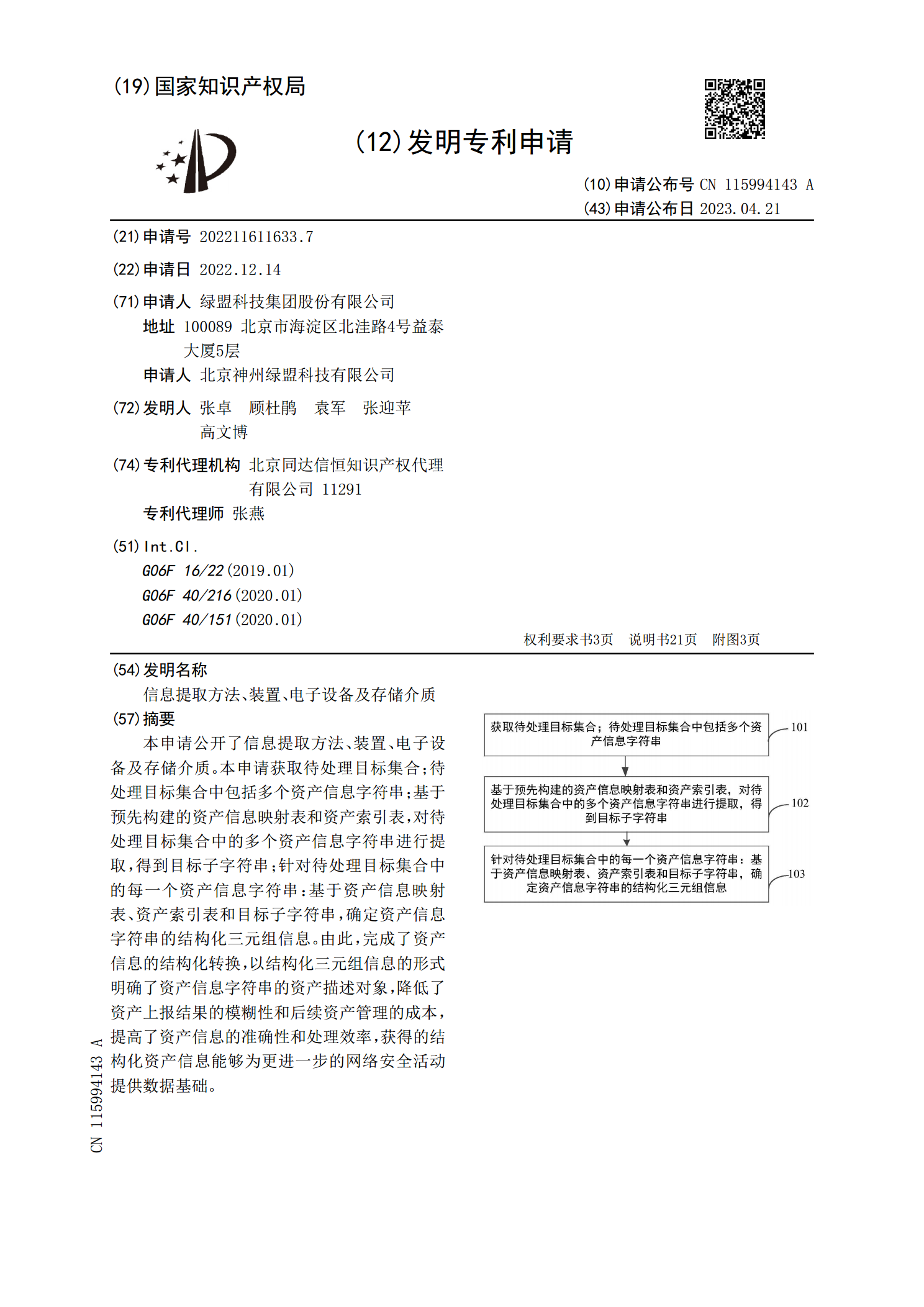
本申请公开了信息提取方法、装置、电子设备及存储介质。本申请获取待处理目标集合;待处理目标集合中包括多个资产信息字符串;基于预先构建的资产信息映射表和资产索引表,对待处理目标集合中的多个资产信息字符串进行提取,得到目标子字符串;针对待处理目标集合中的每一个资产信息字符串:基于资产信息映射表、资产索引表和目标子字符串,确定资产信息字符串的结构化三元组信息。由此,完成了资产信息的结构化转换,以结构化三元组信息的形式明确了资产信息字符串的资产描述对象,降低了资产上报结果的模糊性和后续资产管理的成本,提高了资产信息