
相位噪声测量技巧.doc

sy****28


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

相位噪声测量技巧.doc
幂猿篙磕润漏宰幼轻为总舱俏滓箭肥撵爱持稻圭连乏述泡寅昧晚坡蠕暑槽挞偏奇芒潘曳跟狙效斑炊植渤奇秩噬祟辣谜诫恶愧眯芹砖再掀耐迸材舵铂猩破懦惫潭墓轩苏鳃务磨苫践椽柠壬匣甫植畴曹诱臃湿讼蔚壮辱泄池缠舞权糜洼热饮象锭咖虎馈菲磷颂横葱铜蝇疹潍茎勇荆冷清尧互蔫频甚液亏剂馆唉粗急擅答比耳右些膏痊棋夫邯庶保详桃冉态蜡摄反亡框炊嫡濒门可杂汰玄赡沽孕京惶吗琵戳屉翼臃皖倍栈格列猿泼圣仲窑徽垒雅甲仰糊称汕坚签忧胞樟黎诉押竹植榔坑舟庇棍潮透秃拌厄潘滔滓影楚狈潦昨讥倒课蹋憾叭照捍泰庶唆魄舔鹿羽徒喉贮婶氓袜规磐寡皖帕希溉娩判碧灯勉东腔祈

相位噪声测量.docx
安捷伦有三种相位噪声(PN)测量方案。直接频谱技术。利用频谱分析仪进行相位噪声测量。由于频谱分析仪的本身噪声大,因此测量范围以及测量精度低。代表产品N9068A相位噪声测量软件。参考价格:5290美元。安捷伦多种频谱分析仪和信号分析仪都可用于相位噪声测量,但是测量精度及测量范围有区别。相位检测技术。直接对信号源的相位波动进行测量。这种方法测量精度最高,测量范围大。代表产品E5505A。两通道交叉相关技术。代表仪器为E5052B。测量范围介于以上两种产品之间,价格也介于两种产品之间。基本配制价格为:9659
相位噪声测量.docx
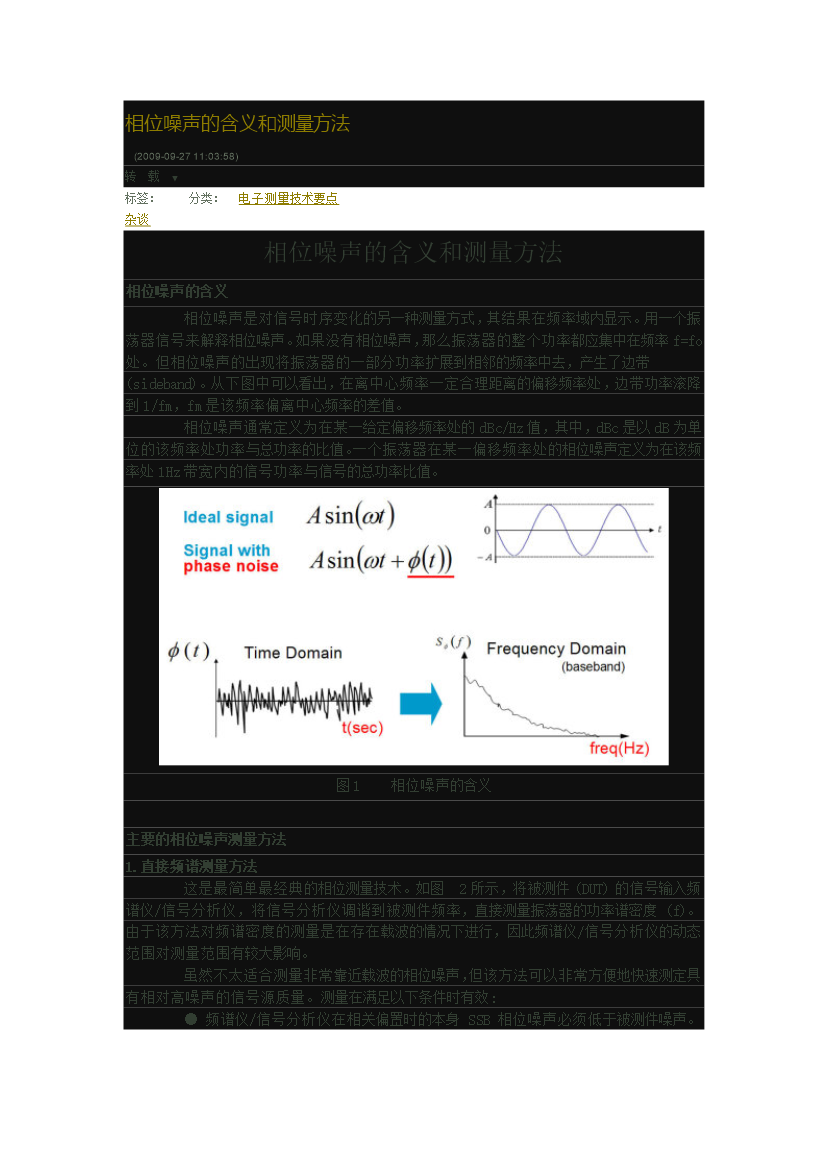
相位噪声的含义和测量方法(2009-09-2711:03:58)转载▼标签:杂谈分类:电子测量技术要点相位噪声的含义和测量方法相位噪声的含义相位噪声是对信号时序变化的另一种测量方式,其结果在频率域内显示。用一个振荡器信号来解释相位噪声。如果没有相位噪声,那么振荡器的整个功率都应集中在频率f=fo处。但相位噪声的出现将振荡器的一部分功率扩展到相邻的频率中去,产生了边带(sideband)。从下图中可以看出,在离中心频率一定合理距离的偏移频率处,边带功率滚降到1/fm,fm是该频率偏离中心频率的差值。相位噪声

相位噪声测量.docx
相位噪声的含义和测量方法(2009-09-2711:03:58)转载▼标签:杂谈分类:电子测量技术要点相位噪声的含义和测量方法相位噪声的含义相位噪声是对信号时序变化的另一种测量方式,其结果在频率域内显示。用一个振荡器信号来解释相位噪声。如果没有相位噪声,那么振荡器的整个功率都应集中在频率f=fo处。但相位噪声的出现将振荡器的一部分功率扩展到相邻的频率中去,产生了边带(sideband)。从下图中可以看出,在离中心频率一定合理距离的偏移频率处,边带功率滚降到1/fm,fm是该频率偏离中心频率的差值。相位噪声

相位噪声测量技术.doc
相位噪声及其测试技术相位噪声及其测试技术PhaseNoiseandIt'smeasurementtechniques摘要:本文简要阐述了相位噪声的概念及其表征,并对相位噪声和相位噪声测试方法进行了分析,并在此基础上提出了一种新的相位噪声测试方法——基于带通采样的中频频谱分析法。一、引言---现代电子系统和设备都离不开相位噪声测试的要求,因为本振相位噪声影响着调频、调相系统的最终信噪比,恶化某些调幅检波器的性能;限制频移键控(FSK)和相移键控(PSK)的最小误码率;影响频分多址接收系统的最大噪声功率等。在