
一种适用多种工件的夹持定位机械.pdf

猫巷****奕声

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种适用多种工件的夹持定位机械.pdf
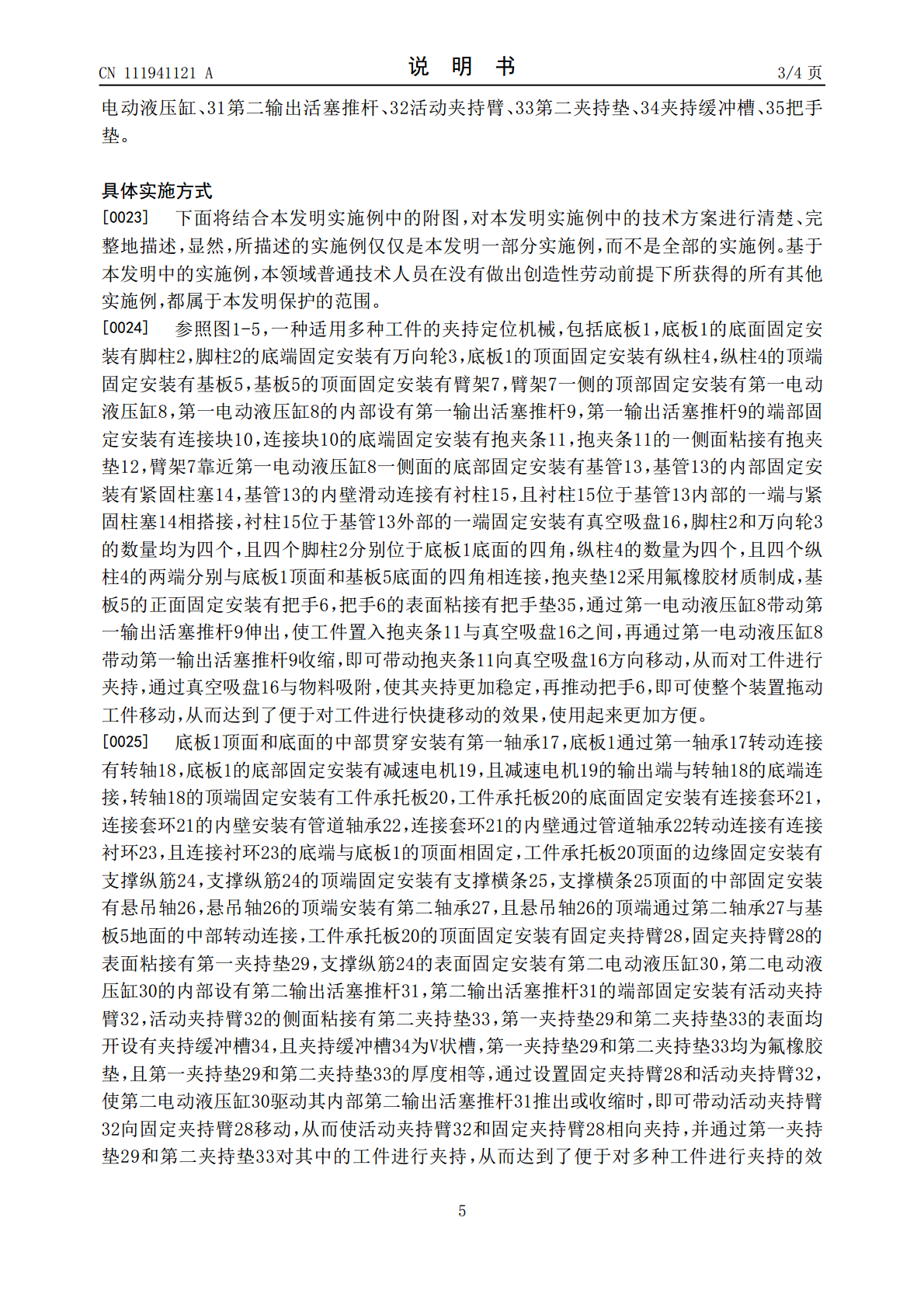
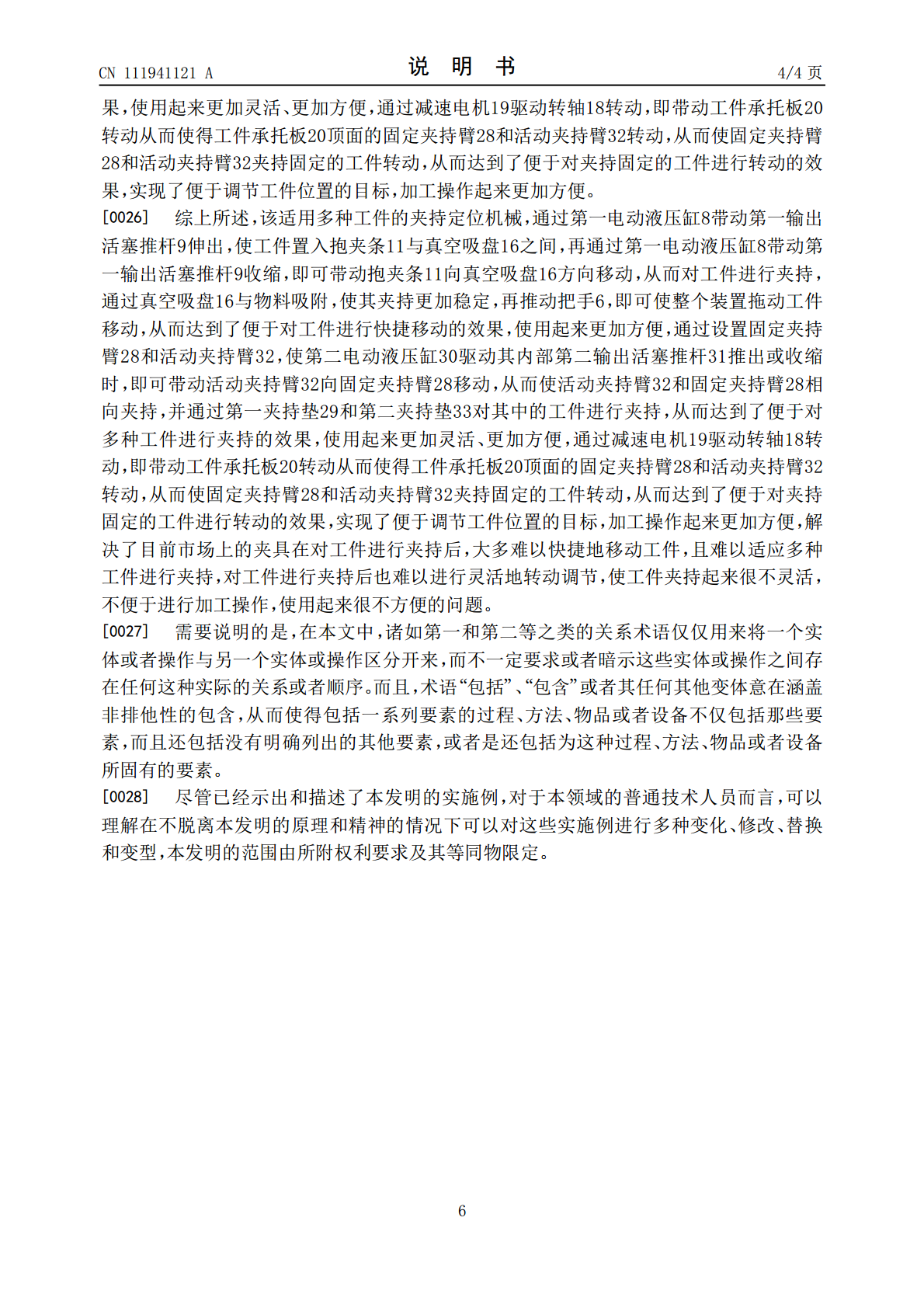
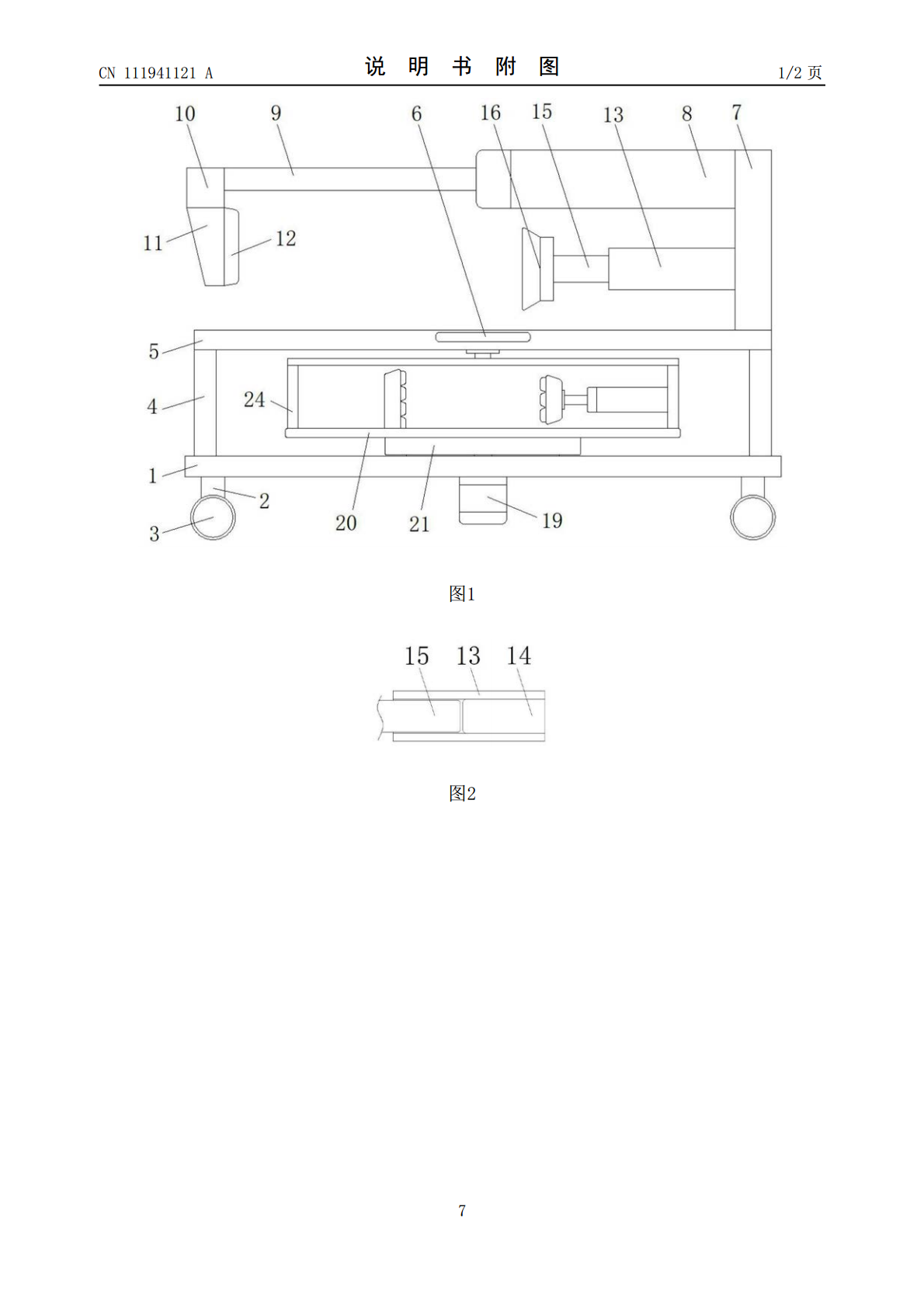
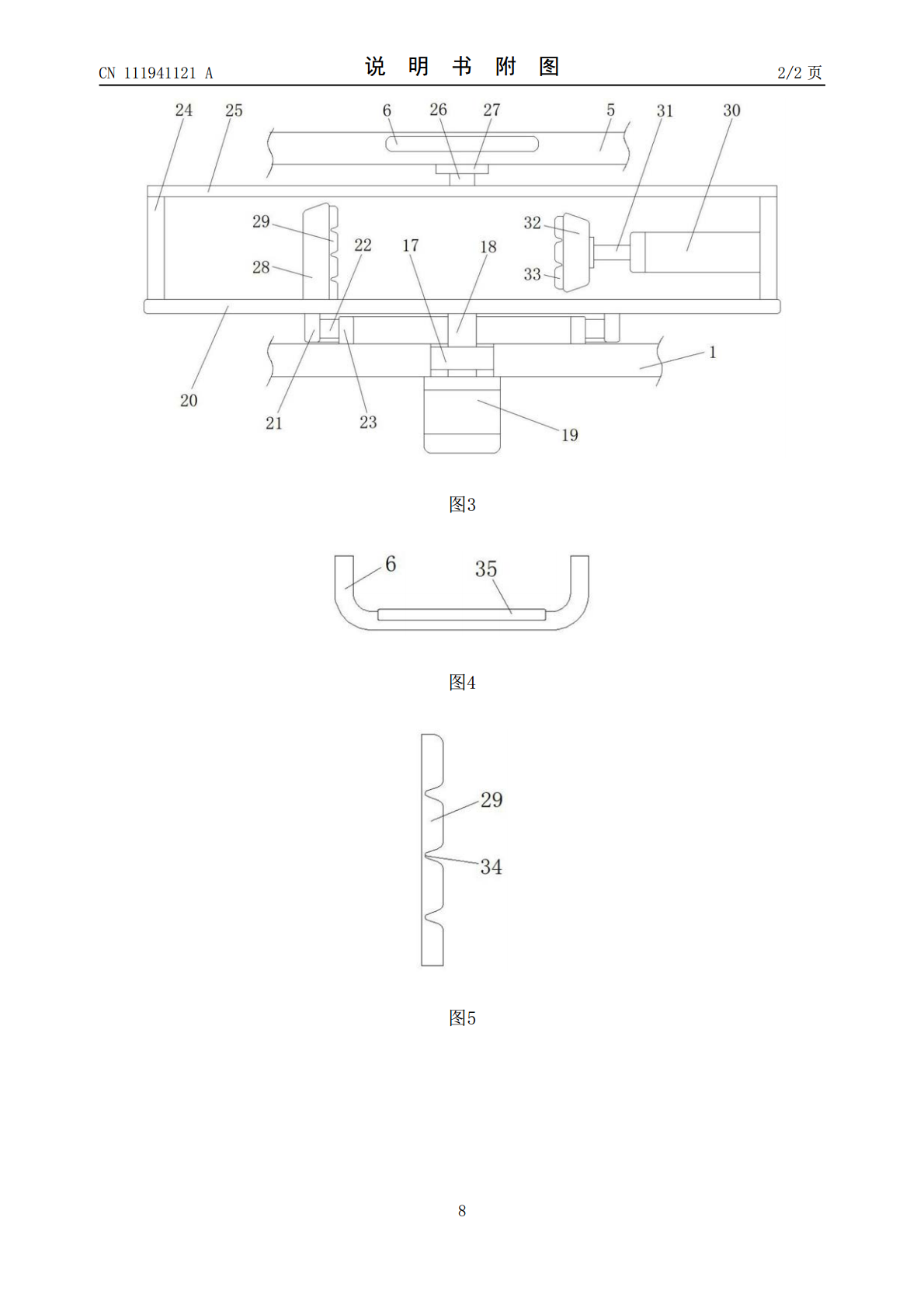
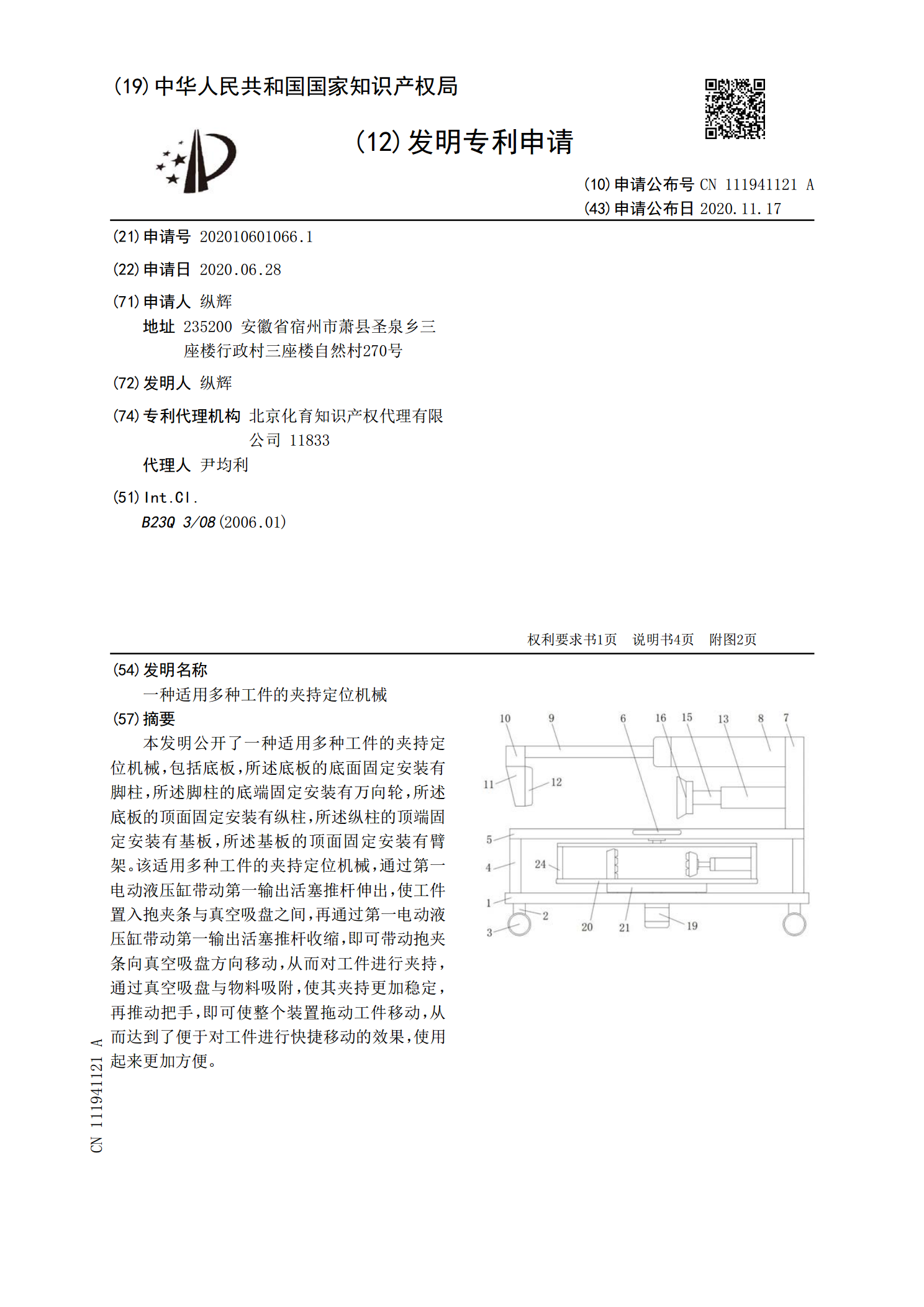
本发明公开了一种适用多种工件的夹持定位机械,包括底板,所述底板的底面固定安装有脚柱,所述脚柱的底端固定安装有万向轮,所述底板的顶面固定安装有纵柱,所述纵柱的顶端固定安装有基板,所述基板的顶面固定安装有臂架。该适用多种工件的夹持定位机械,通过第一电动液压缸带动第一输出活塞推杆伸出,使工件置入抱夹条与真空吸盘之间,再通过第一电动液压缸带动第一输出活塞推杆收缩,即可带动抱夹条向真空吸盘方向移动,从而对工件进行夹持,通过真空吸盘与物料吸附,使其夹持更加稳定,再推动把手,即可使整个装置拖动工件移动,从而达到了便于对
一种工件定位夹持设备.pdf
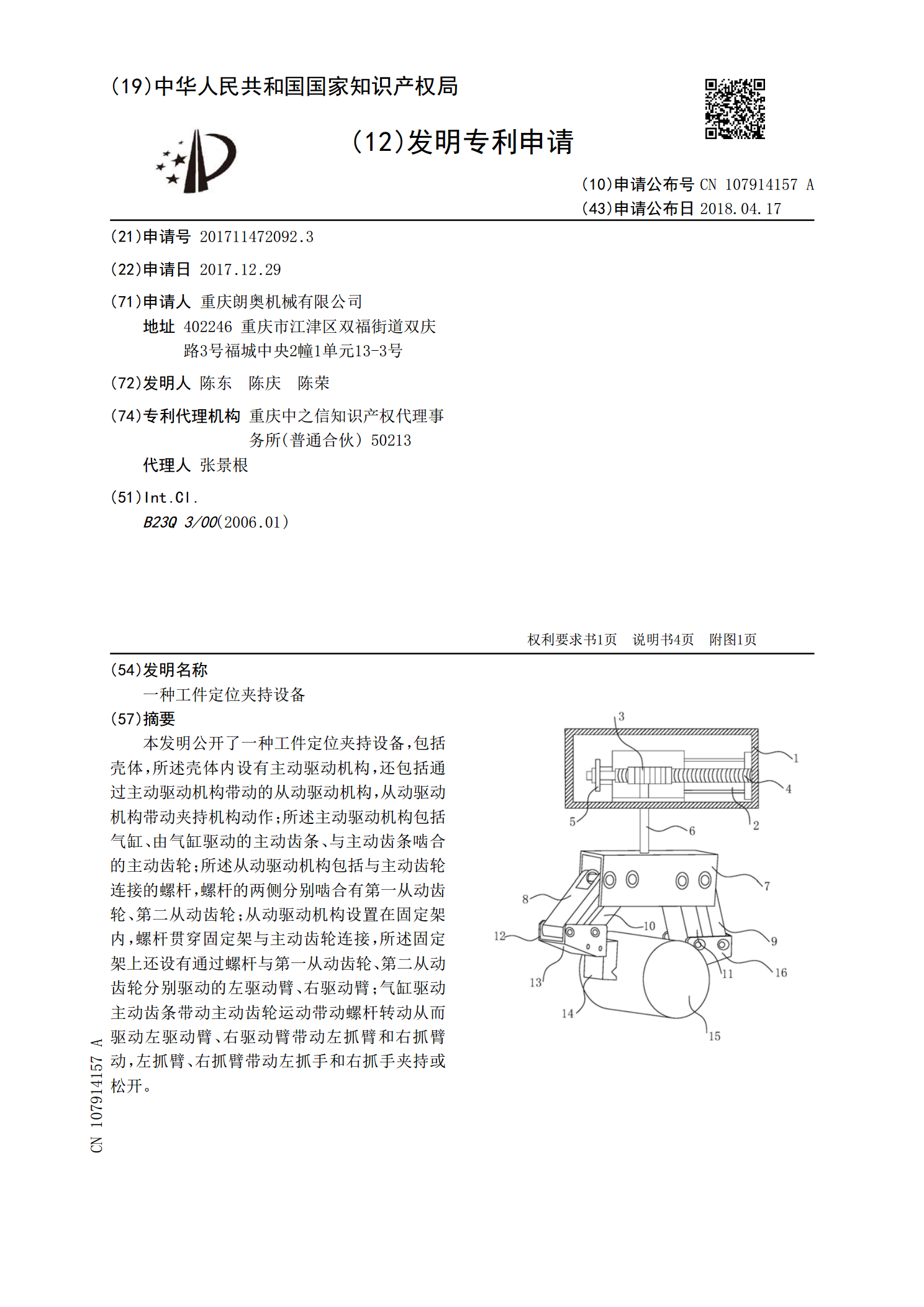
本发明公开了一种工件定位夹持设备,包括壳体,所述壳体内设有主动驱动机构,还包括通过主动驱动机构带动的从动驱动机构,从动驱动机构带动夹持机构动作;所述主动驱动机构包括气缸、由气缸驱动的主动齿条、与主动齿条啮合的主动齿轮;所述从动驱动机构包括与主动齿轮连接的螺杆,螺杆的两侧分别啮合有第一从动齿轮、第二从动齿轮;从动驱动机构设置在固定架内,螺杆贯穿固定架与主动齿轮连接,所述固定架上还设有通过螺杆与第一从动齿轮、第二从动齿轮分别驱动的左驱动臂、右驱动臂;气缸驱动主动齿条带动主动齿轮运动带动螺杆转动从而驱动左驱动臂
一种工件定位夹持设备.pdf
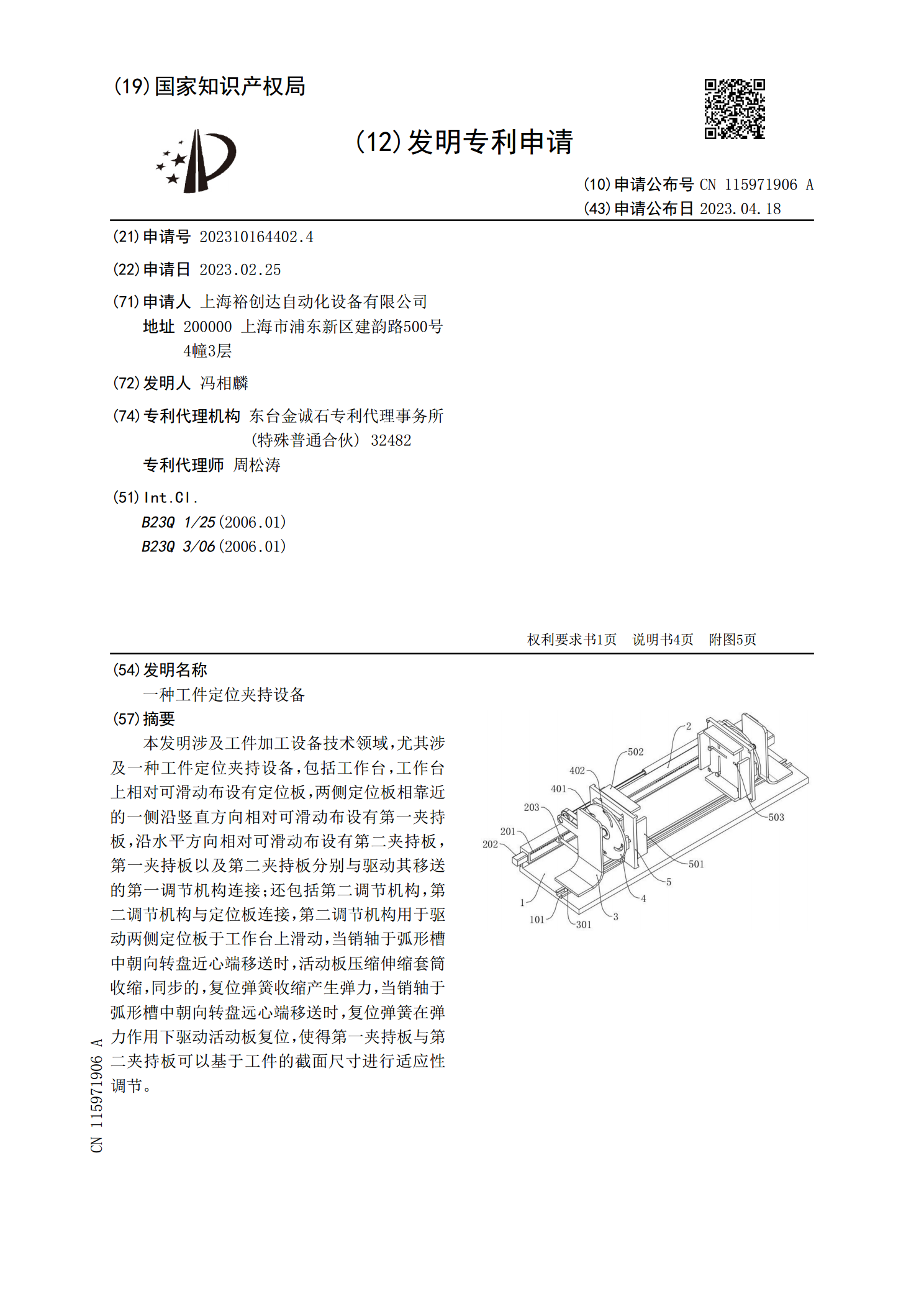
本发明涉及工件加工设备技术领域,尤其涉及一种工件定位夹持设备,包括工作台,工作台上相对可滑动布设有定位板,两侧定位板相靠近的一侧沿竖直方向相对可滑动布设有第一夹持板,沿水平方向相对可滑动布设有第二夹持板,第一夹持板以及第二夹持板分别与驱动其移送的第一调节机构连接;还包括第二调节机构,第二调节机构与定位板连接,第二调节机构用于驱动两侧定位板于工作台上滑动,当销轴于弧形槽中朝向转盘近心端移送时,活动板压缩伸缩套筒收缩,同步的,复位弹簧收缩产生弹力,当销轴于弧形槽中朝向转盘远心端移送时,复位弹簧在弹力作用下驱动
一种钻床的工件定位夹持组件.pdf
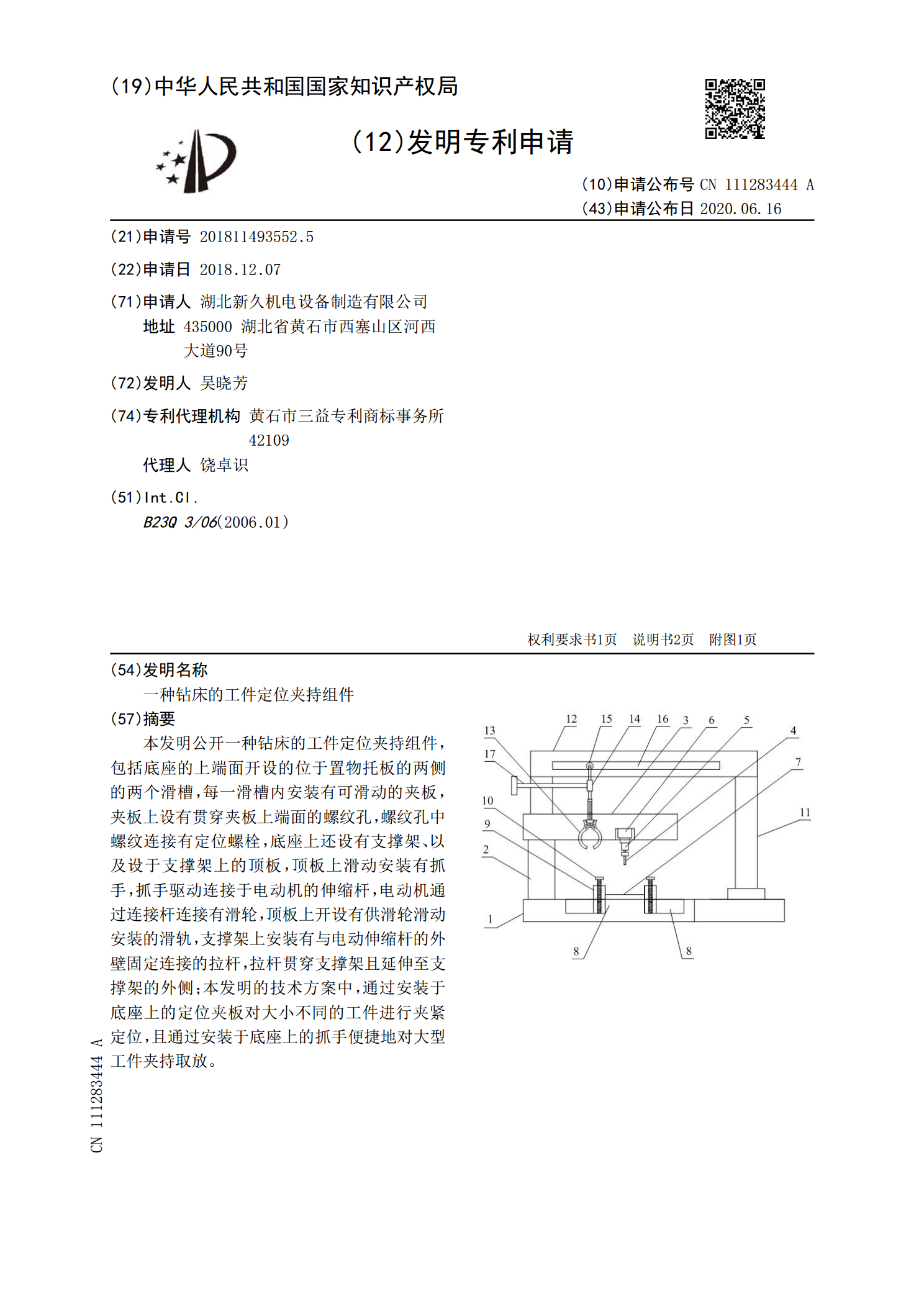
本发明公开一种钻床的工件定位夹持组件,包括底座的上端面开设的位于置物托板的两侧的两个滑槽,每一滑槽内安装有可滑动的夹板,夹板上设有贯穿夹板上端面的螺纹孔,螺纹孔中螺纹连接有定位螺栓,底座上还设有支撑架、以及设于支撑架上的顶板,顶板上滑动安装有抓手,抓手驱动连接于电动机的伸缩杆,电动机通过连接杆连接有滑轮,顶板上开设有供滑轮滑动安装的滑轨,支撑架上安装有与电动伸缩杆的外壁固定连接的拉杆,拉杆贯穿支撑架且延伸至支撑架的外侧;本发明的技术方案中,通过安装于底座上的定位夹板对大小不同的工件进行夹紧定位,且通过安装

螺纹加工机床工件定位夹持装置.pdf
本发明公开了一种螺纹加工机床工件定位夹持装置,它由带内腔的支座、位于支座上平面的运行机构和位于支座腔体内的传动机构组成。运行机构是由两个开口相对的V形卡爪和左、右两个拖板组成,形成一对可开合的钳口;传动机构位于支座的内腔中,由一个固定在支座内腔的一侧气动马达、一套啮合安装在支座内腔中心的大小齿轮、一个左旋滚珠丝杠副和一个右旋滚珠丝杠副组成,小齿轮与马达轴套接,两个滚珠丝杠副轴插接在大齿轮内孔中,滚珠螺母分别与左、右拖板固联。该装置具有外圆自动定位和自适应夹持与保护功能,能跟随刀具切削运动而平稳随动,使刀具