
一种手动组装装置.pdf

骊英****bb


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种手动组装装置.pdf
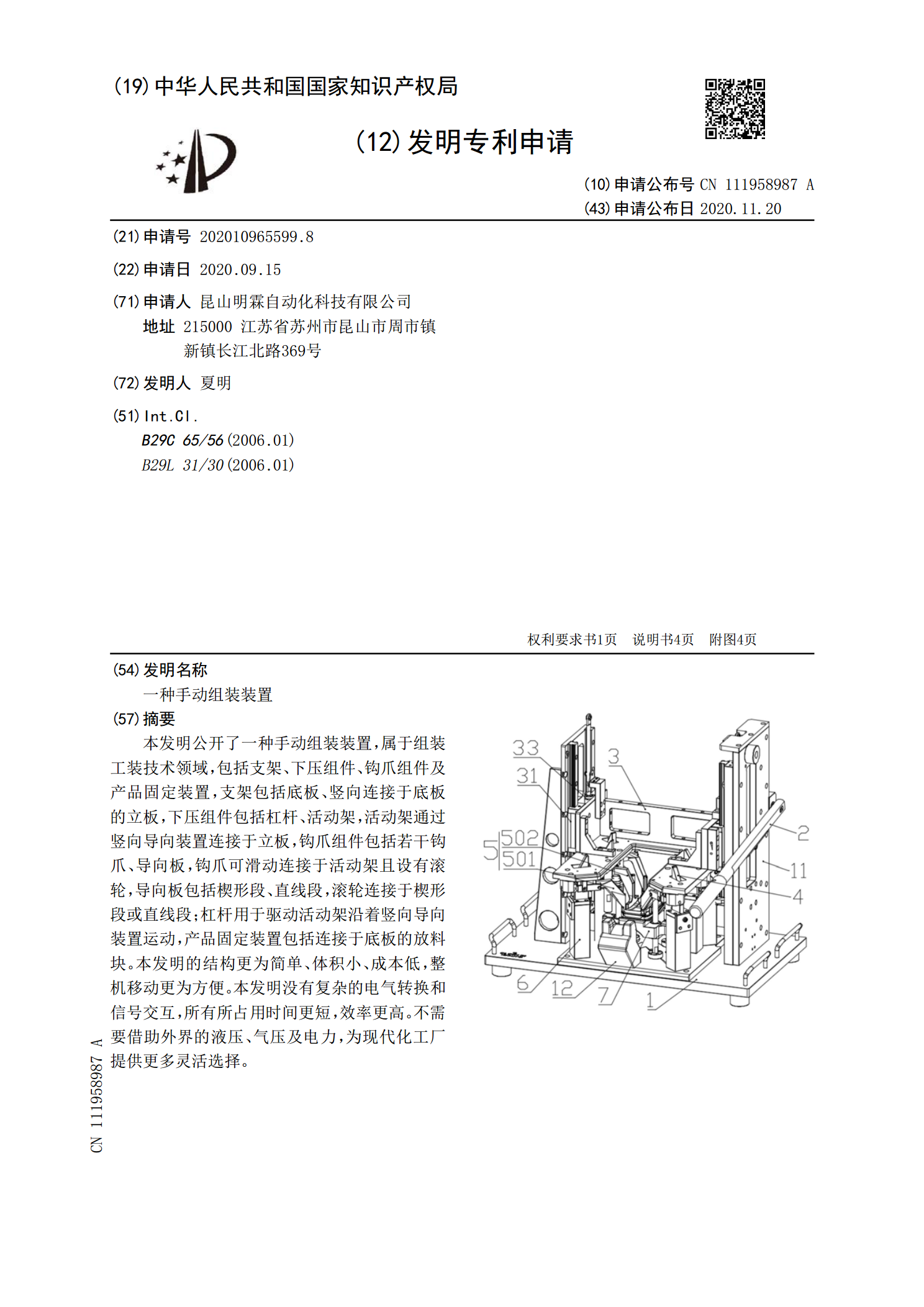
本发明公开了一种手动组装装置,属于组装工装技术领域,包括支架、下压组件、钩爪组件及产品固定装置,支架包括底板、竖向连接于底板的立板,下压组件包括杠杆、活动架,活动架通过竖向导向装置连接于立板,钩爪组件包括若干钩爪、导向板,钩爪可滑动连接于活动架且设有滚轮,导向板包括楔形段、直线段,滚轮连接于楔形段或直线段;杠杆用于驱动活动架沿着竖向导向装置运动,产品固定装置包括连接于底板的放料块。本发明的结构更为简单、体积小、成本低,整机移动更为方便。本发明没有复杂的电气转换和信号交互,所有所占用时间更短,效率更高。不需

一种手动油管接头组装装置.pdf
本发明公开了一种手动油管接头组装装置,其包括底座,所述底座上竖直设置有支架,其特征在于:所述底座上设置有可放置油管接头的接头座,所述接头座上方竖直设置有杆形的按压杆,所述按压杆可上下移动地设置在所述支架上,所述按压杆下端设置有可夹持油管的油管夹具,所述支架上还设置有可驱动所述按压杆上下移动的手柄。本发明的一种手动油管接头组装装置利用枢轴手柄装置,将油管和油管接头通过按压的方式组装起来。其具有结构简单,省力,成本低,效率高等优点。
一种手动夹持装置.pdf
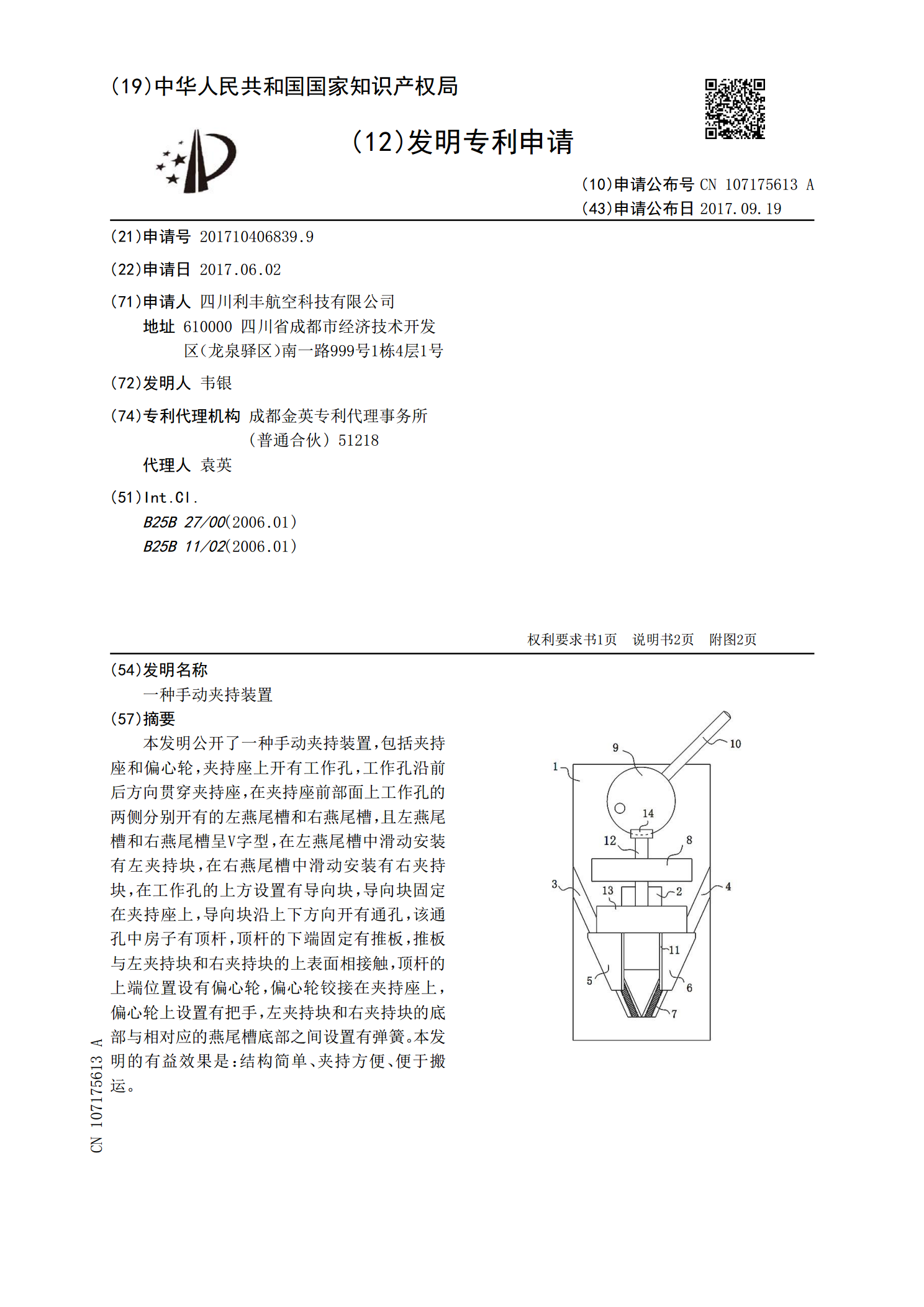
本发明公开了一种手动夹持装置,包括夹持座和偏心轮,夹持座上开有工作孔,工作孔沿前后方向贯穿夹持座,在夹持座前部面上工作孔的两侧分别开有的左燕尾槽和右燕尾槽,且左燕尾槽和右燕尾槽呈V字型,在左燕尾槽中滑动安装有左夹持块,在右燕尾槽中滑动安装有右夹持块,在工作孔的上方设置有导向块,导向块固定在夹持座上,导向块沿上下方向开有通孔,该通孔中房子有顶杆,顶杆的下端固定有推板,推板与左夹持块和右夹持块的上表面相接触,顶杆的上端位置设有偏心轮,偏心轮铰接在夹持座上,偏心轮上设置有把手,左夹持块和右夹持块的底部与相对应的
一种手动控制装置.pdf
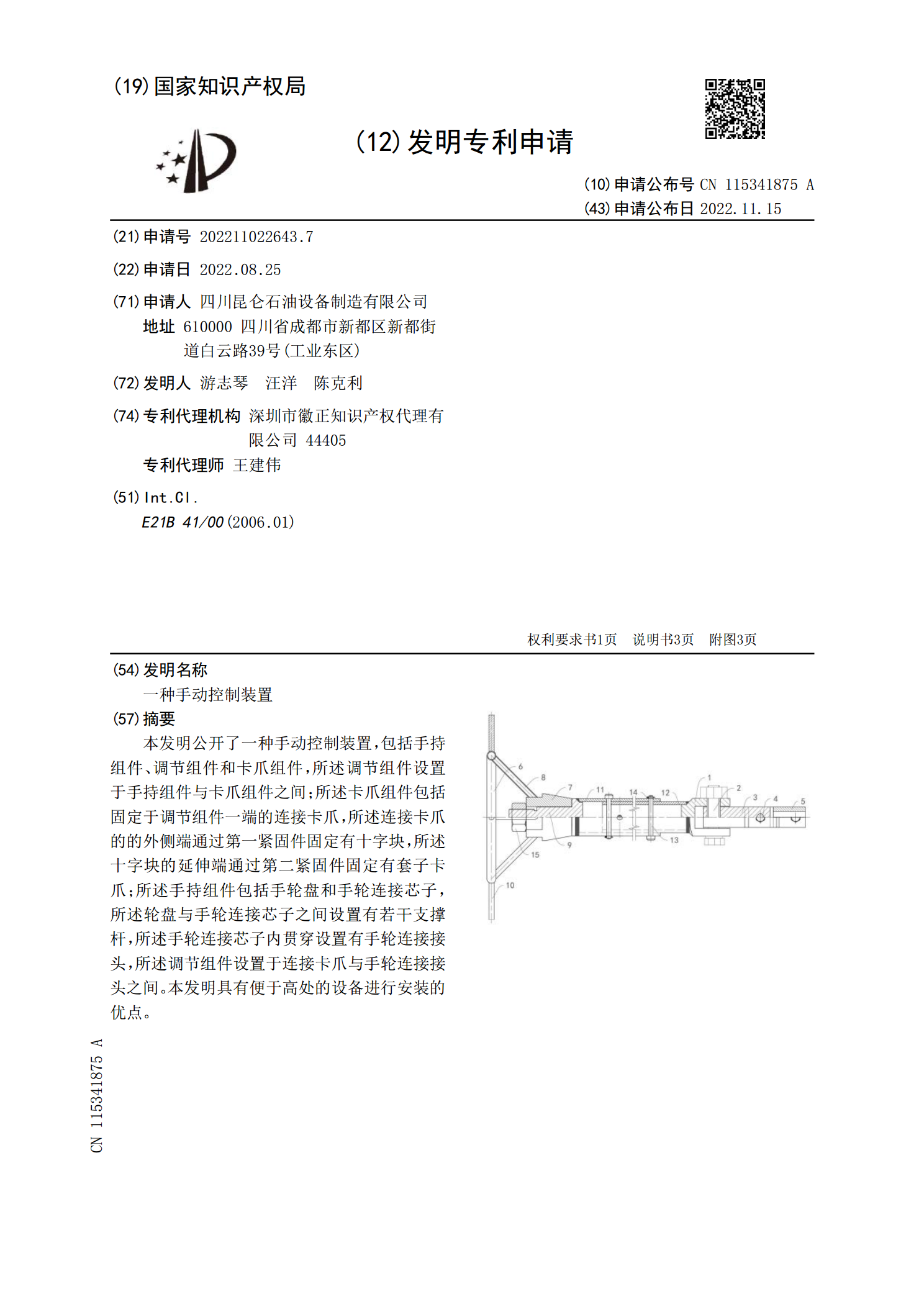
本发明公开了一种手动控制装置,包括手持组件、调节组件和卡爪组件,所述调节组件设置于手持组件与卡爪组件之间;所述卡爪组件包括固定于调节组件一端的连接卡爪,所述连接卡爪的的外侧端通过第一紧固件固定有十字块,所述十字块的延伸端通过第二紧固件固定有套子卡爪;所述手持组件包括手轮盘和手轮连接芯子,所述轮盘与手轮连接芯子之间设置有若干支撑杆,所述手轮连接芯子内贯穿设置有手轮连接接头,所述调节组件设置于连接卡爪与手轮连接接头之间。本发明具有便于高处的设备进行安装的优点。
一种手动解锁装置.pdf
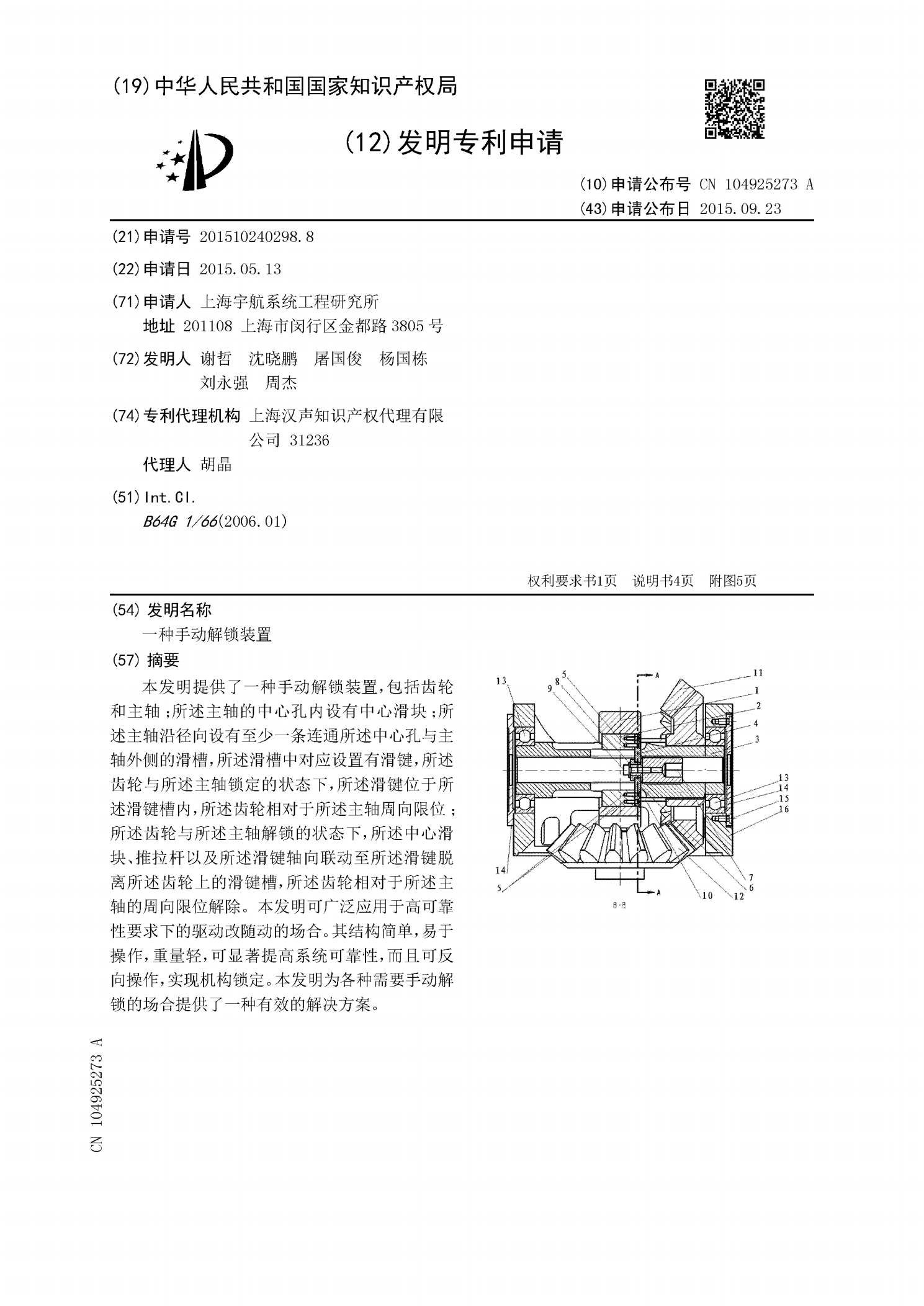
本发明提供了一种手动解锁装置,包括齿轮和主轴;所述主轴的中心孔内设有中心滑块;所述主轴沿径向设有至少一条连通所述中心孔与主轴外侧的滑槽,所述滑槽中对应设置有滑键,所述齿轮与所述主轴锁定的状态下,所述滑键位于所述滑键槽内,所述齿轮相对于所述主轴周向限位;所述齿轮与所述主轴解锁的状态下,所述中心滑块、推拉杆以及所述滑键轴向联动至所述滑键脱离所述齿轮上的滑键槽,所述齿轮相对于所述主轴的周向限位解除。本发明可广泛应用于高可靠性要求下的驱动改随动的场合。其结构简单,易于操作,重量轻,可显著提高系统可靠性,而且可反向