
重型车辆多轴转向系统设计综述.pdf

qw****27

1/8
2/8
3/8
4/8
5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

重型车辆多轴转向系统设计综述.pdf
万方数据重型车辆多轴转向系统设计综述Multi-axle古玉锋方宗德张国胜戚玉轩Heavy-dutySysteml重型车辆多轴转向系统设计概述2重型车辆多轴转向系统研究现状·综述·(西北工业大学)主题词:重型汽车多轴汽车转向系统设计中图分类号:U463.4文献标识码:A文章编号:1000—3703(2009)01—0001—05DesignofTruckSteeringtruck.Thetruck,Multi-axle对于多轴转向重型车辆,如转向系统设计不合理,会造成不同转向轴上轮胎转角之间的相互影响,导
重型车辆多轴转向系统设计综述-古玉锋.pdf
综述··重型车辆多轴转向系统设计综述古玉锋方宗德张国胜戚玉轩西北工业大学()综述了重型汽车多轴转向系统设计的现状主要内容及方法分析了目前我国在该领域研究所存在的主【摘要】、,要问题提出了基于整车底盘系统集成优化匹配平台的转向系统设计方法以某载货汽车双前桥转向系统为,。8×4例阐述了基于该方法的横拉杆设计过程结果表明该设计方法能够充分发挥所集成的各优化分析软件的优势实,。,,现各车型设计的高效率与自动化。主题词:重型汽车多轴汽车转向系统设计中图分类号:U463.4文献标识码:A文章编号:1000-3703(
重型车辆多轴转向系统设计综述-古玉锋.pdf
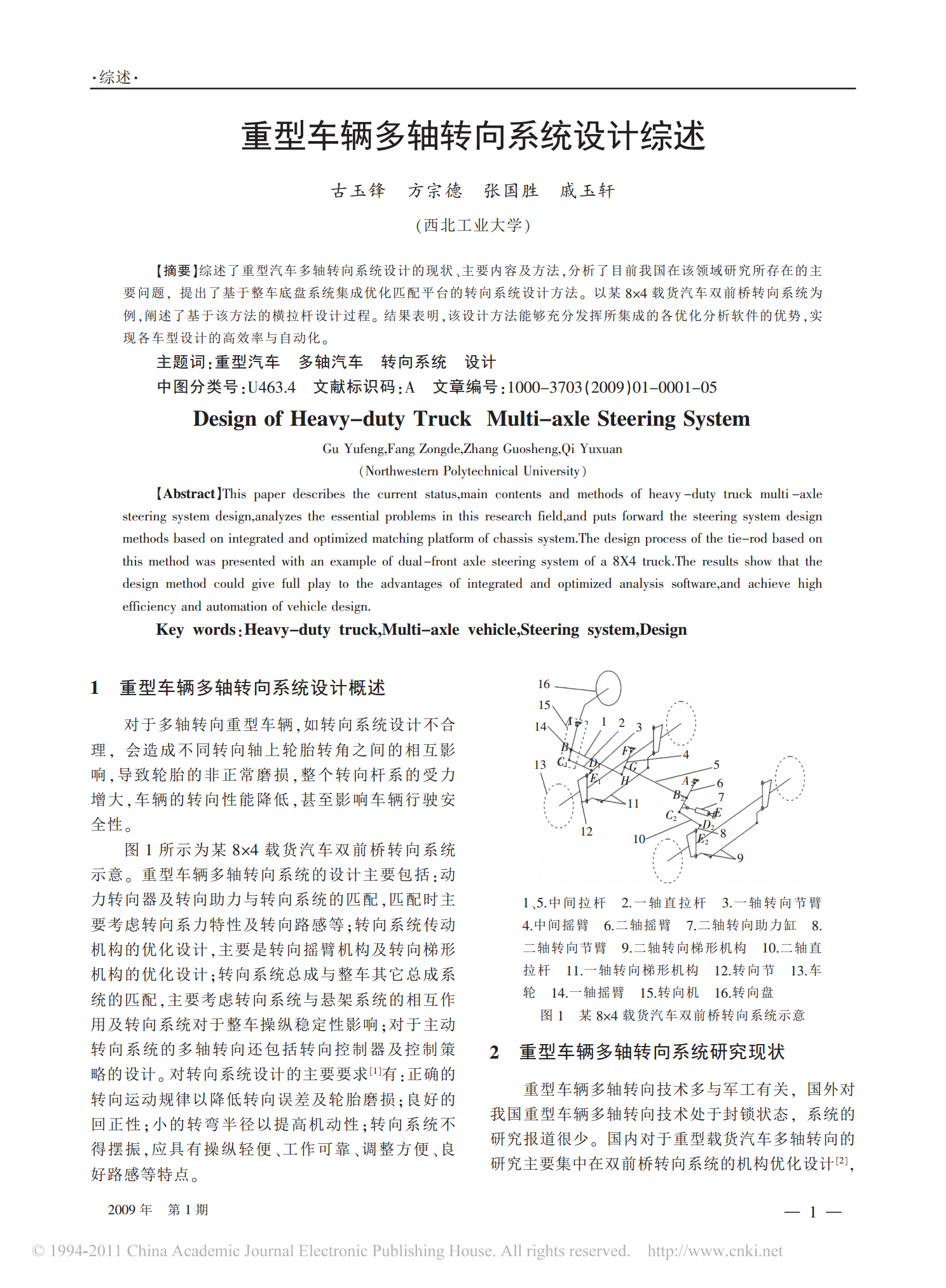
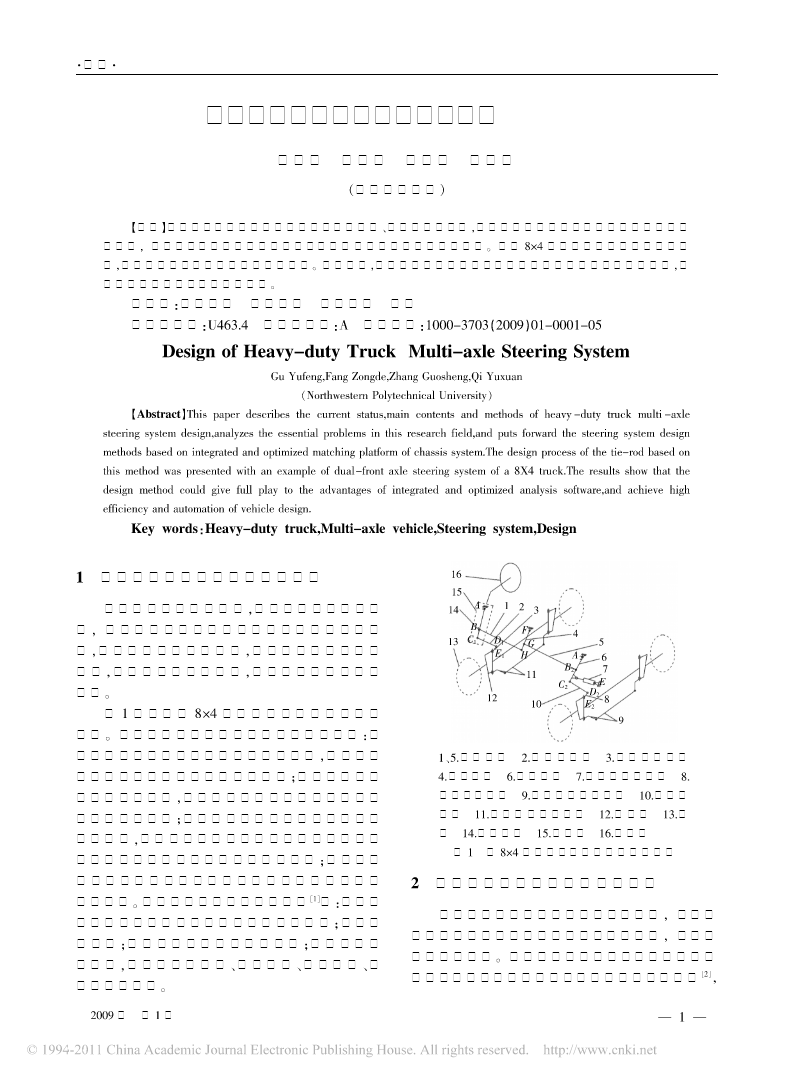
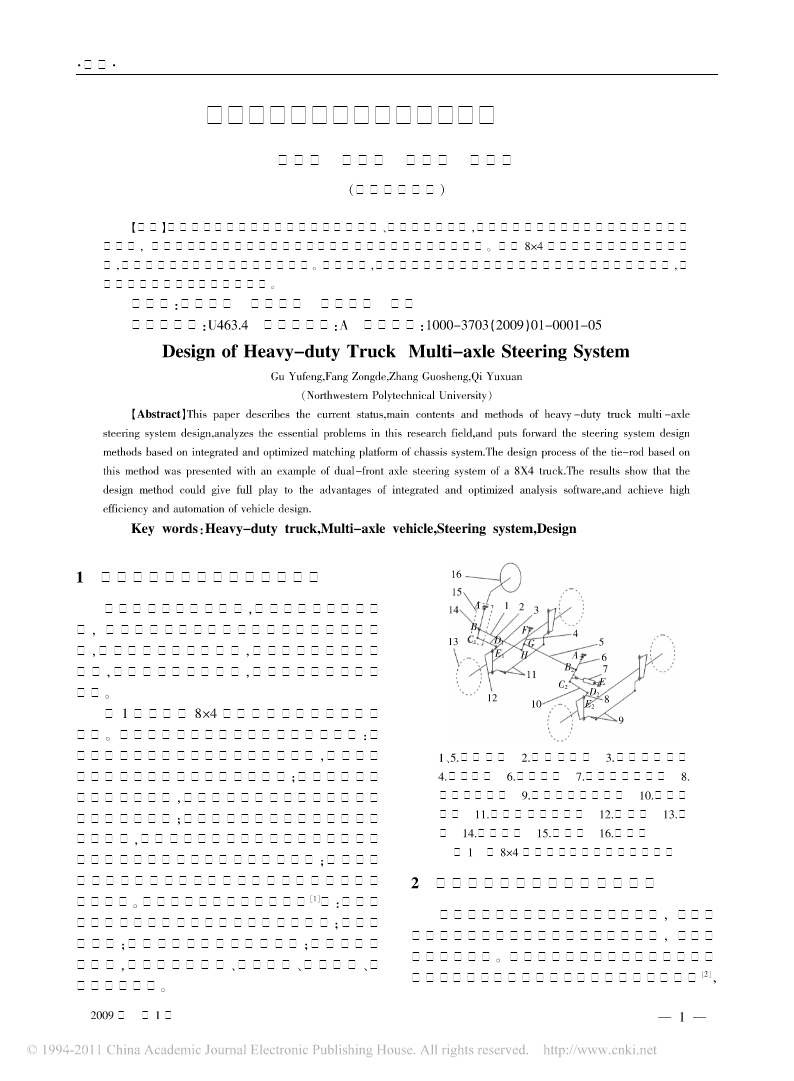
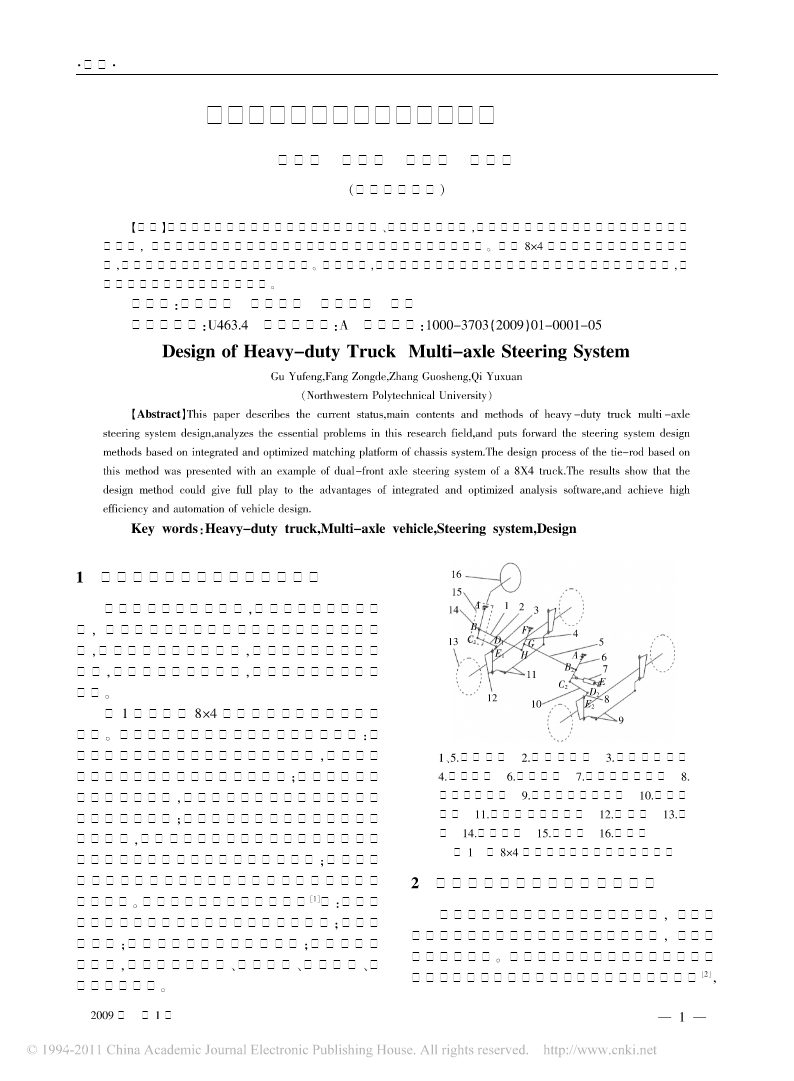
·综述·重型车辆多轴转向系统设计综述古玉锋方宗德张国胜戚玉轩(西北工业大学)【摘要】综述了重型汽车多轴转向系统设计的现状、主要内容及方法,分析了目前我国在该领域研究所存在的主要问题,提出了基于整车底盘系统集成优化匹配平台的转向系统设计方法。以某8×4载货汽车双前桥转向系统为例,阐述了基于该方法的横拉杆设计过程。结果表明,该设计方法能够充分发挥所集成的各优化分析软件的优势,实现各车型设计的高效率与自动化。主题词:重型汽车多轴汽车转向系统设计中图分类号:U463.4文献标识码:A文章编号:1000-3703(
重型车辆多轴转向系统设计综述-古玉锋.pdf
·综述·重型车辆多轴转向系统设计综述古玉锋方宗德张国胜戚玉轩(西北工业大学)【摘要】综述了重型汽车多轴转向系统设计的现状、主要内容及方法,分析了目前我国在该领域研究所存在的主要问题,提出了基于整车底盘系统集成优化匹配平台的转向系统设计方法。以某8×4载货汽车双前桥转向系统为例,阐述了基于该方法的横拉杆设计过程。结果表明,该设计方法能够充分发挥所集成的各优化分析软件的优势,实现各车型设计的高效率与自动化。主题词:重型汽车多轴汽车转向系统设计中图分类号:U463.4文献标识码:A文章编号:1000-3703(
重型车辆多轴转向系统设计综述-古玉锋.pdf
·综述·重型车辆多轴转向系统设计综述古玉锋方宗德张国胜戚玉轩(西北工业大学)【摘要】综述了重型汽车多轴转向系统设计的现状、主要内容及方法,分析了目前我国在该领域研究所存在的主要问题,提出了基于整车底盘系统集成优化匹配平台的转向系统设计方法。以某8×4载货汽车双前桥转向系统为例,阐述了基于该方法的横拉杆设计过程。结果表明,该设计方法能够充分发挥所集成的各优化分析软件的优势,实现各车型设计的高效率与自动化。主题词:重型汽车多轴汽车转向系统设计中图分类号:U463.4文献标识码:A文章编号:1000-3703(