
“智能车辆关键技术研究”项目申请书(控制系统).doc

qw****27


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

“智能车辆关键技术研究”项目申请书(控制系统).doc
类别智能车辆关键技术研究项目编号中国科学院合肥智能机械研究所知识创新工程领域前沿项目课题申请书课题名称:智能车辆控制技术课题负责人:钱玮申请部门:智能车辆技术中心参加单位:中国科学院合肥智能机械研究所联系电话:13909690285E-mail:wqian@iim.ac.cn2009年12月10日课题简表课题名称智能车辆控制技术开题日期2010年01月终止年月2011年12月类别智能车辆专项子课题数9申请金额20万元密级1.绝密2.机密3.秘密4.内部5.公开4申请部门智能车辆技术中心参加单位中国科学院合

车辆在线智能管理系统关键技术研究.docx
车辆在线智能管理系统关键技术研究车辆在线智能管理系统关键技术研究摘要车辆在线智能管理系统作为一种重要的管理手段,广泛应用于车辆管理、物流配送和共享出行等领域。本论文旨在研究车辆在线智能管理系统的关键技术,主要包括定位与导航技术、数据传输与通信技术、数据处理与分析技术以及安全与防护技术。通过对这些关键技术的研究和分析,可以为车辆在线智能管理系统的设计和开发提供指导和支持。关键词:车辆在线智能管理系统;定位与导航技术;数据传输与通信技术;数据处理与分析技术;安全与防护技术1.引言随着社会的发展和科技的进步,车

智能车辆同时定位与建图关键技术研究的开题报告.docx
智能车辆同时定位与建图关键技术研究的开题报告一、研究背景智能车辆技术作为智能交通系统的重要组成部分,在未来的交通系统中将会扮演着更为重要的角色,而智能车辆的定位与建图技术就是实现智能车辆自主化驾驶和智能交通系统的关键技术之一。目前,全球范围内已经涌现了众多智能车辆项目,包括谷歌、特斯拉、Uber和百度等企业,他们都已经开始在自动驾驶领域进行实验和研究,并计划在未来数年内投入数量可观的智能车辆。而面对现有的智能车辆技术,在实现自动驾驶的过程中,智能车辆的位置和环境感知问题依然是制约其发展的瓶颈之一。因此,研

隧道照明智能控制系统的节能关键技术研究.docx
隧道照明智能控制系统的节能关键技术研究隧道照明智能控制系统的节能关键技术研究摘要:随着社会经济的快速发展,交通运输的需求不断增加,隧道作为交通运输中重要的组成部分,需保证行车安全和通行效率。然而,传统的隧道照明系统存在能源浪费、维护困难等问题。为此,隧道照明智能控制系统的节能关键技术研究愈加迫切。本论文对隧道照明智能控制系统的节能关键技术进行了综述,并重点研究了光感应、智能调光和灯具选择等方面的技术。1.引言隧道照明智能控制系统的节能关键技术研究是当前照明领域的研究热点之一。随着环境保护意识的增强,节能减
车辆智能控制系统及具有其的车辆.pdf
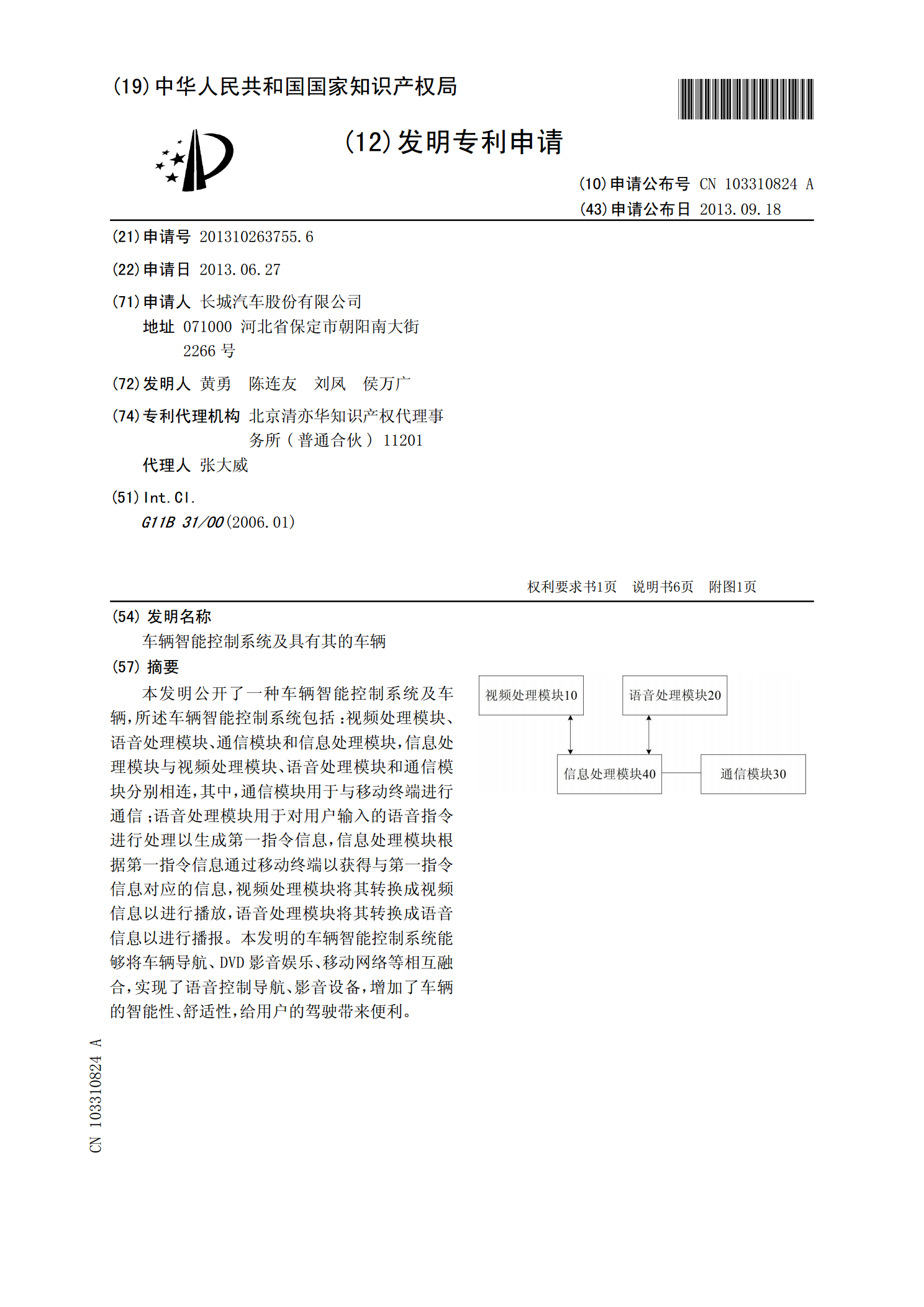
本发明公开了一种车辆智能控制系统及车辆,所述车辆智能控制系统包括:视频处理模块、语音处理模块、通信模块和信息处理模块,信息处理模块与视频处理模块、语音处理模块和通信模块分别相连,其中,通信模块用于与移动终端进行通信;语音处理模块用于对用户输入的语音指令进行处理以生成第一指令信息,信息处理模块根据第一指令信息通过移动终端以获得与第一指令信息对应的信息,视频处理模块将其转换成视频信息以进行播放,语音处理模块将其转换成语音信息以进行播报。本发明的车辆智能控制系统能够将车辆导航、DVD影音娱乐、移动网络等相互融合