
智能储物柜及在智能储物柜中实现自动消防的方法.pdf

是你****元呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
智能储物柜及在智能储物柜中实现自动消防的方法.pdf
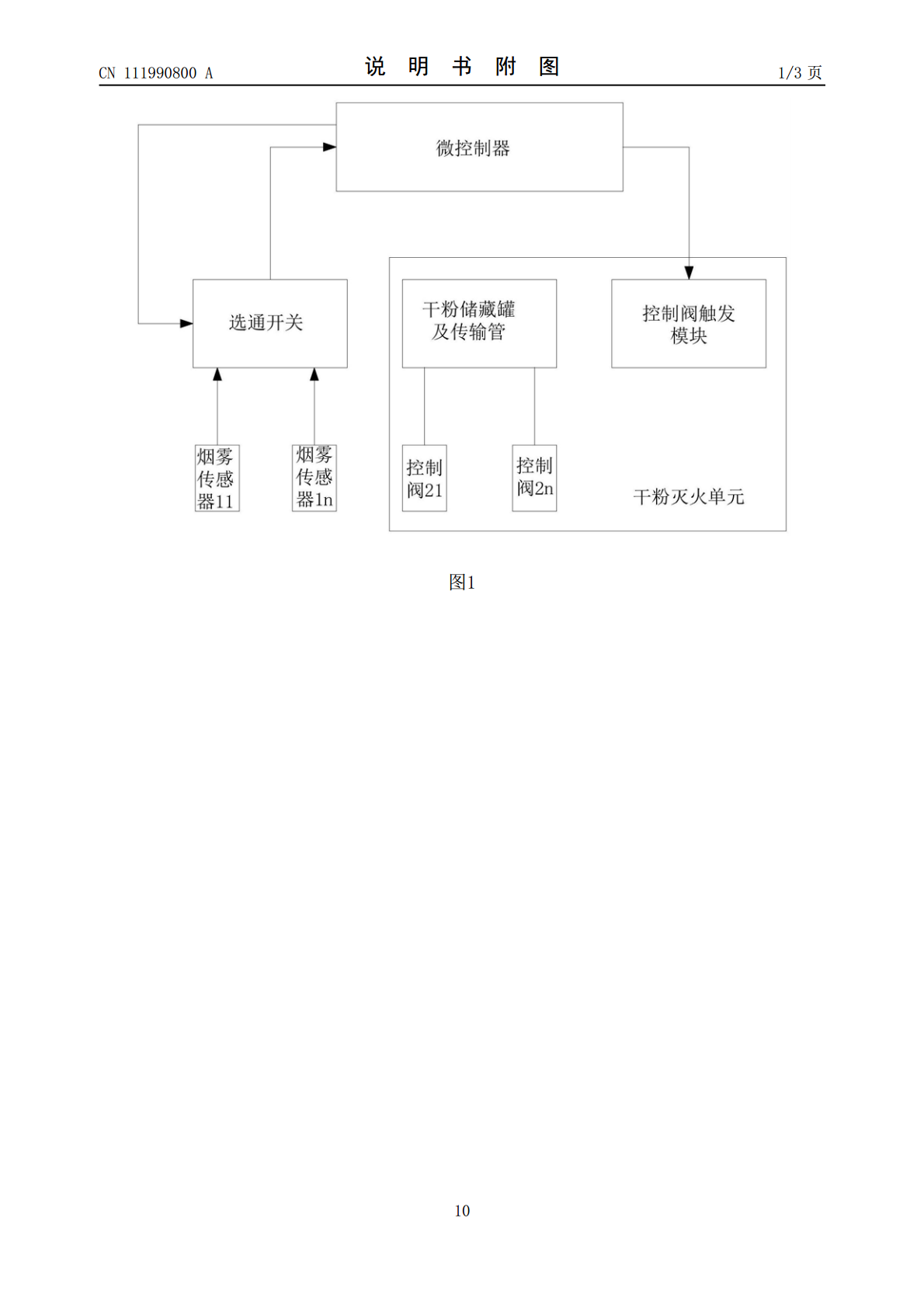
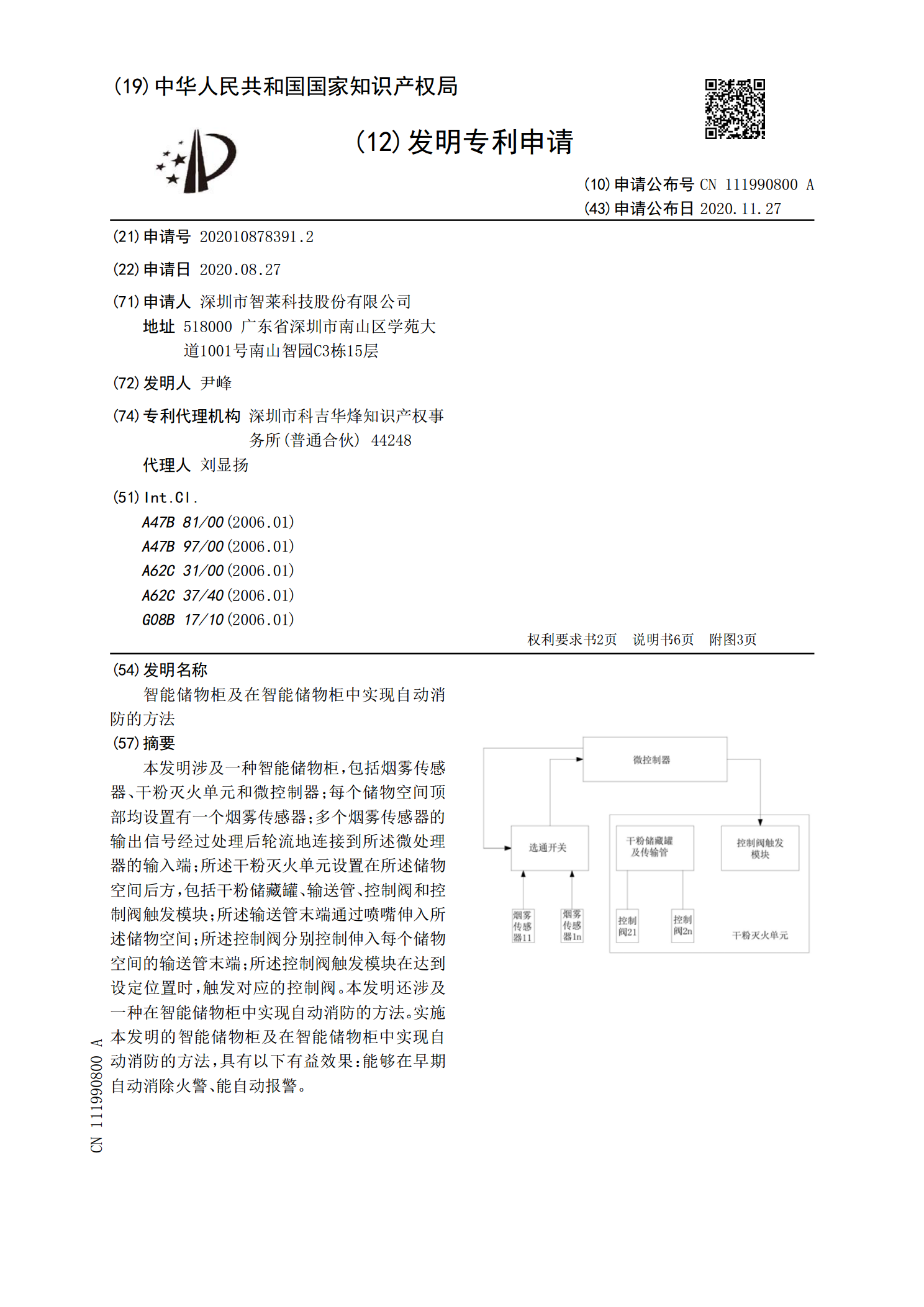
本发明涉及一种智能储物柜,包括烟雾传感器、干粉灭火单元和微控制器;每个储物空间顶部均设置有一个烟雾传感器;多个烟雾传感器的输出信号经过处理后轮流地连接到所述微处理器的输入端;所述干粉灭火单元设置在所述储物空间后方,包括干粉储藏罐、输送管、控制阀和控制阀触发模块;所述输送管末端通过喷嘴伸入所述储物空间;所述控制阀分别控制伸入每个储物空间的输送管末端;所述控制阀触发模块在达到设定位置时,触发对应的控制阀。本发明还涉及一种在智能储物柜中实现自动消防的方法。实施本发明的智能储物柜及在智能储物柜中实现自动消防的方法

智能储物柜.pdf
本发明适用于家具领域,提供了一种智能储物柜,包括柜体,柜体的前端设有柜门,智能储物柜还包括若干储物盒、用于支撑各储物盒的支撑柜、设于支撑柜底部的支撑台、用于取放各储物盒的取物机构和用于带动取物机构移动到指定位置的三轴移动装置。通过设置支撑柜来支撑住若干储物盒,通过三轴移动装置来移动取物机构,以将取物机构移动到相应的储物盒处,使取物机构可以从支撑柜中取出相应储物盒,再移动到支撑台,将储物盒放置在支撑台上;而储物盒中物品取出后,取物机构可以将支撑台上的储物盒托起,再通过三轴移动装置移动到支撑柜的指定位置,将储
智能储物柜.pdf
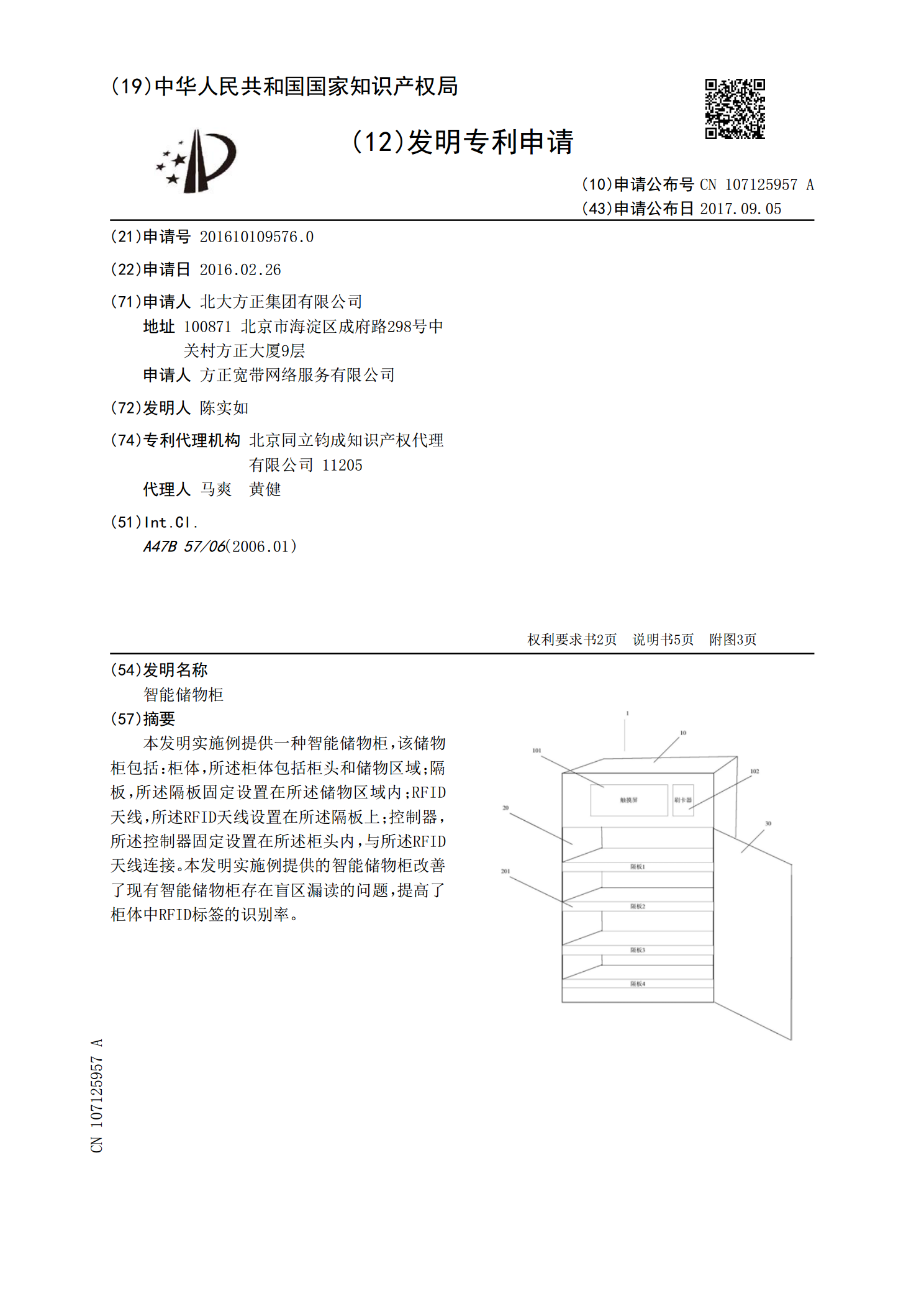
本发明实施例提供一种智能储物柜,该储物柜包括:柜体,所述柜体包括柜头和储物区域;隔板,所述隔板固定设置在所述储物区域内;RFID天线,所述RFID天线设置在所述隔板上;控制器,所述控制器固定设置在所述柜头内,与所述RFID天线连接。本发明实施例提供的智能储物柜改善了现有智能储物柜存在盲区漏读的问题,提高了柜体中RFID标签的识别率。
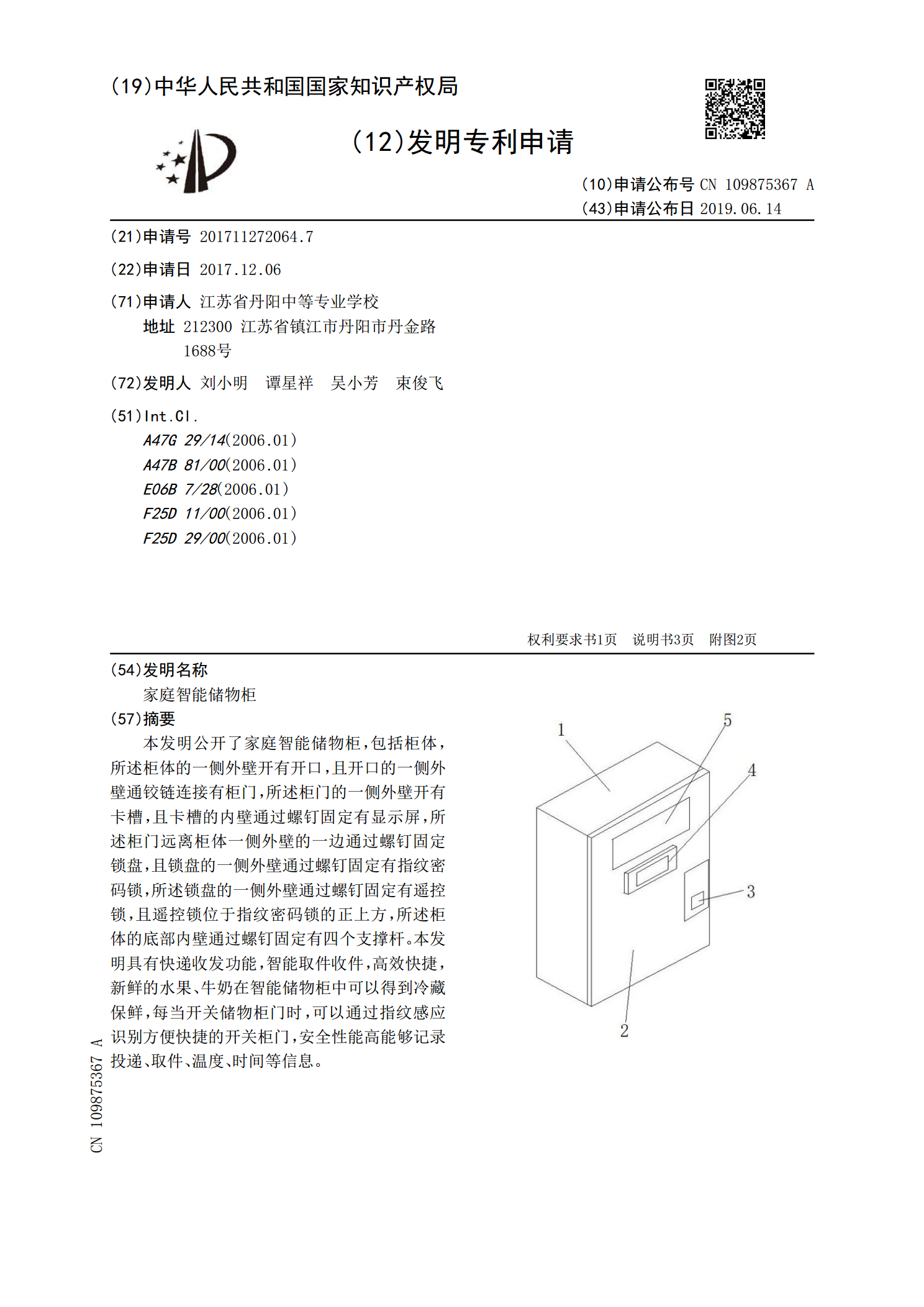
家庭智能储物柜.pdf
本发明公开了家庭智能储物柜,包括柜体,所述柜体的一侧外壁开有开口,且开口的一侧外壁通铰链连接有柜门,所述柜门的一侧外壁开有卡槽,且卡槽的内壁通过螺钉固定有显示屏,所述柜门远离柜体一侧外壁的一边通过螺钉固定锁盘,且锁盘的一侧外壁通过螺钉固定有指纹密码锁,所述锁盘的一侧外壁通过螺钉固定有遥控锁,且遥控锁位于指纹密码锁的正上方,所述柜体的底部内壁通过螺钉固定有四个支撑杆。本发明具有快递收发功能,智能取件收件,高效快捷,新鲜的水果、牛奶在智能储物柜中可以得到冷藏保鲜,每当开关储物柜门时,可以通过指纹感应识别方便快
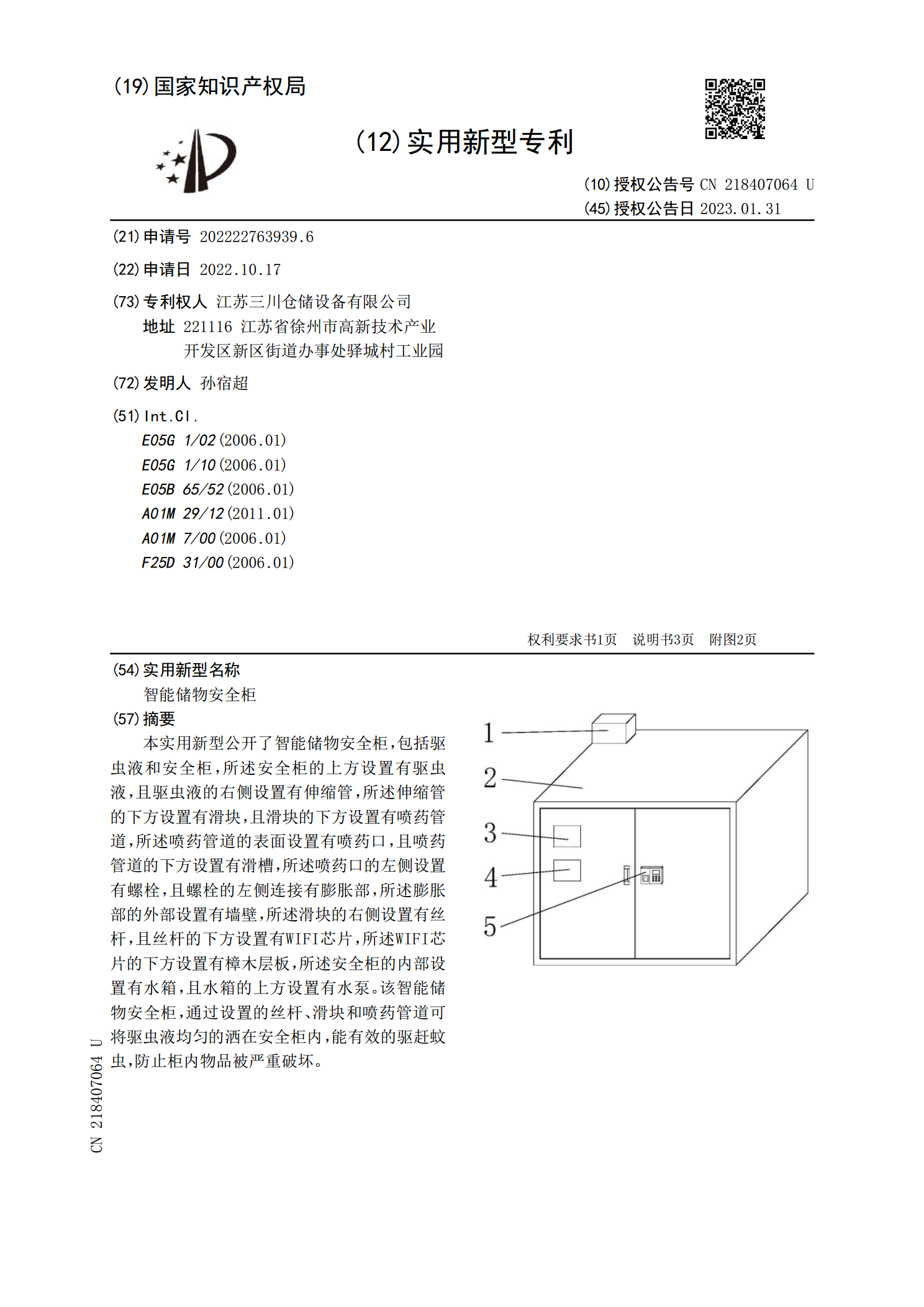
智能储物安全柜.pdf
本实用新型公开了智能储物安全柜,包括驱虫液和安全柜,所述安全柜的上方设置有驱虫液,且驱虫液的右侧设置有伸缩管,所述伸缩管的下方设置有滑块,且滑块的下方设置有喷药管道,所述喷药管道的表面设置有喷药口,且喷药管道的下方设置有滑槽,所述喷药口的左侧设置有螺栓,且螺栓的左侧连接有膨胀部,所述膨胀部的外部设置有墙壁,所述滑块的右侧设置有丝杆,且丝杆的下方设置有WIFI芯片,所述WIFI芯片的下方设置有樟木层板,所述安全柜的内部设置有水箱,且水箱的上方设置有水泵。该智能储物安全柜,通过设置的丝杆、滑块和喷药管道可将驱