
LabVIEW和Matlab混合编程的预测PID控制器研究.pdf

qw****27


1/4

2/4
3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
LabVIEW和Matlab混合编程的预测PID控制器研究.pdf
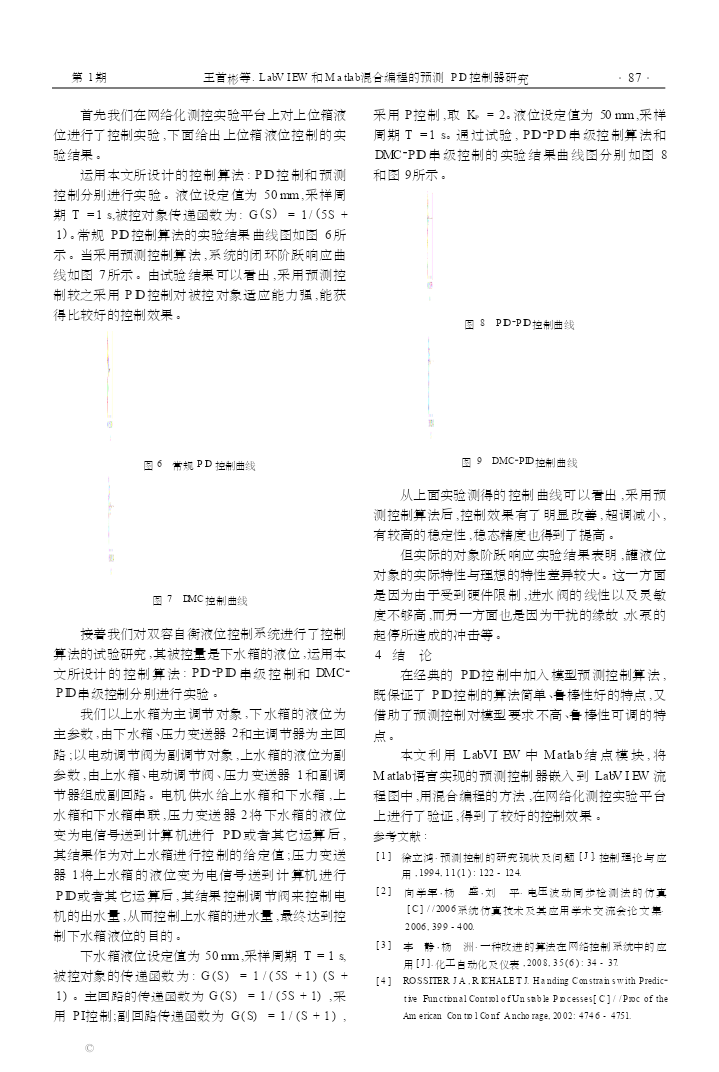
化工自动化及仪表,2010,37(1):85~88研究与应用ControlandInstrumentsinChemicalIndustryLabVIEW和Matlab混合编程的预测PID控制器研究1,212王首彬,李成伟,龚威(1.哈尔滨工业大学电气工程及自动化学院,哈尔滨150001;2.天津城市建设学院电子与信息工程系,天津300384)摘要:针对现代工业过程中普遍对控制系统稳定性、小超调和快速性的要求,在经典PID控制的基础上,介绍了对模型要求不高、鲁棒性可调的预测控制算法。充分利用预测控制的预测功

LabVIEW和Matlab混合编程的预测PID控制器研究.docx
LabVIEW和Matlab混合编程的预测PID控制器研究LabVIEW和Matlab混合编程的预测PID控制器研究摘要:本文对混合编程技术在预测PID控制器中的应用进行了研究和探讨。首先介绍了PID控制器的基本原理和优缺点。接着,引入了预测PID控制器的概念,并阐述了其在工业自动化控制中的重要意义。然后,分别从LabVIEW和Matlab两个软件平台的角度,详细探讨了其在预测PID控制器中的应用。最后,通过实验验证了混合编程技术在预测PID控制器中的优越性和可行性。关键词:混合编程,预测PID控制器,L

LabVIEW和MATLAB混合编程的时频域积分方法研究.docx
LabVIEW和MATLAB混合编程的时频域积分方法研究LabVIEW和MATLAB是两个非常常见的编程语言和开发环境,它们在科学研究和工程应用中被广泛使用。本文将探讨LabVIEW和MATLAB的混合编程方法,并应用于时频域积分的研究。时频域积分是一种重要的信号处理技术,可以在时域和频域上对信号进行分析和处理。具体来说,它可以用于在给定时间段内对信号进行积分,并将结果表示为时频域的分布。时频域积分在许多领域中具有广泛的应用,包括通信系统、图像处理、生物医学等。在LabVIEW和MATLAB混合编程中,L

MATLAB和LabVIEW混合编程及在控制系统中的应用.pdf
2009年10月机床与液压Oct12009第37卷第10期MACHINETOOL&HYDRAULICSVol137No110DOI:10.3969/j1issn11001-3881120091101066MATLAB和LabVIEW混合编程及在控制系统中的应用胡佑兰,彭天好,朱刘英(安徽理工大学机械工程学院,安徽淮南232001)摘要:概述了MATLAB和LabVIEW两种编程语言的特点和四种混合编程的实现方法,结合典型控制系统实例,重点研究了使用MATLABScript节点进行混合编程的技术特点和设计方

LabVIEW和MATLAB混合编程及在机械优化设计中的应用.docx
LabVIEW和MATLAB混合编程及在机械优化设计中的应用背景介绍LabVIEW和MATLAB作为两种广泛应用的工程软件,在机械优化设计中都具有很高的实用性和可靠性。LabVIEW是一种专门针对快速、测量和控制系统开发的可视化编程语言,可以轻松地创建程序化的控制和监视系统。而MATLAB则是一种强大的计算工具,可以完成数学建模、数据分析和图形绘制等任务。两者均能进行机械优化设计。混合编程定义混合编程是将两种或多种编程语言组合在一起使用,从而实现更高级的功能和更强大的计算能力。LabVIEW和MATLAB