
改进粒子群算法在机器人路径规划中的应用.pdf

qw****27

1/4
2/4

3/4
4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
改进粒子群算法在机器人路径规划中的应用.pdf
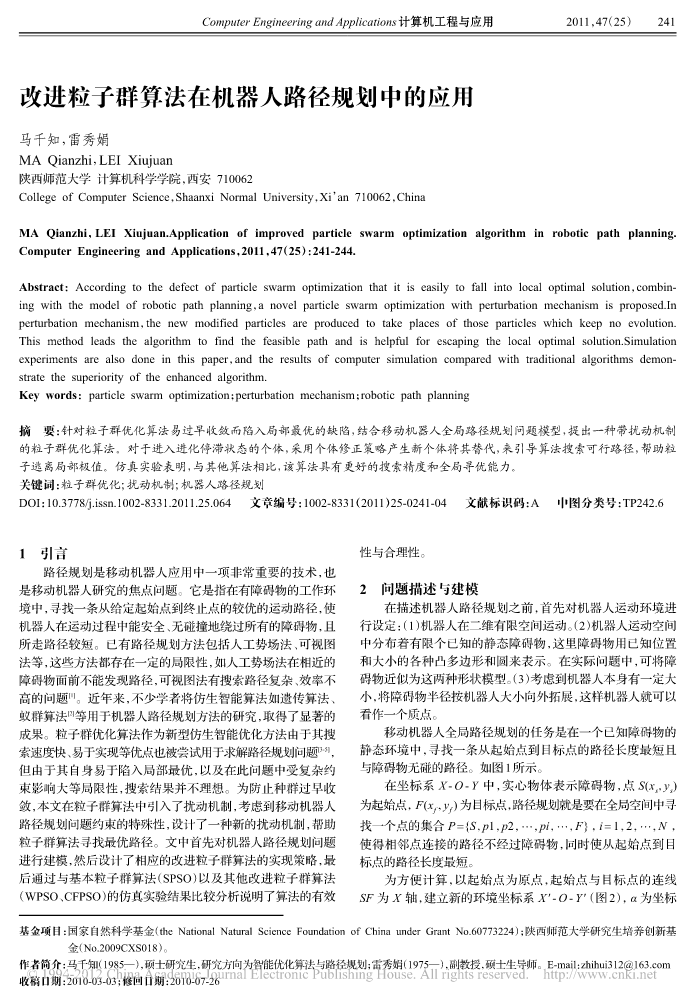
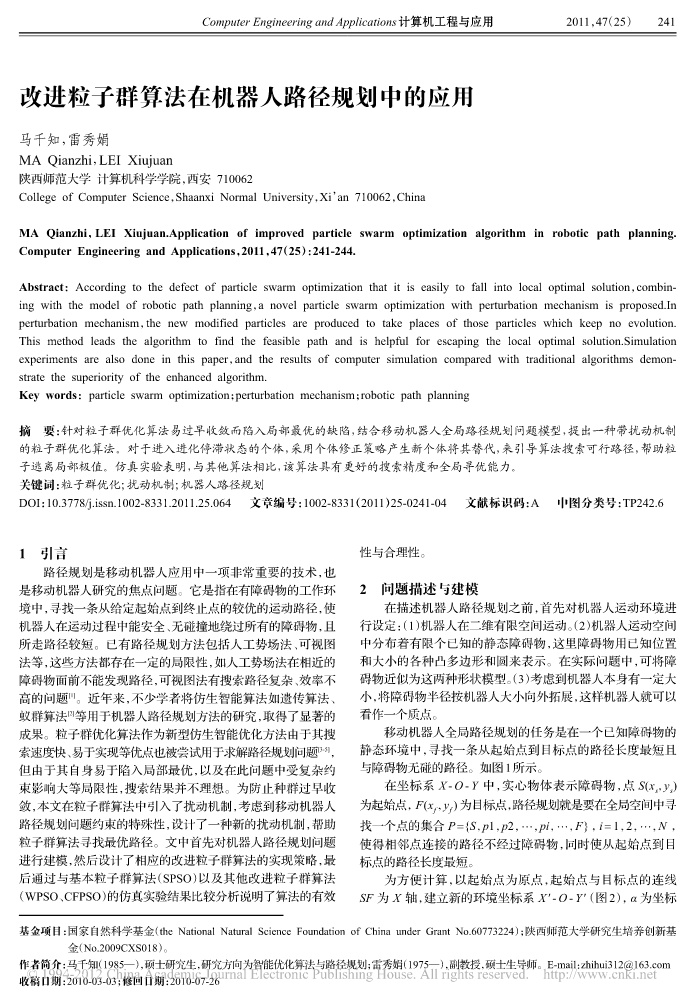
ComputerEngineeringandApplications计算机工程与应用2011,47(25)241改进粒子群算法在机器人路径规划中的应用马千知,雷秀娟MAQianzhi,LEIXiujuan陕西师范大学计算机科学学院,西安710062CollegeofComputerScience,ShaanxiNormalUniversity,Xi’an710062,ChinaMAQianzhi,LEIXiujuan.Applicationofimprovedparticleswarmoptimizati

基于改进粒子群算法的机器人路径规划.docx
基于改进粒子群算法的机器人路径规划基于改进粒子群算法的机器人路径规划摘要:机器人路径规划是机器人领域的一个关键问题,旨在找到一个最优且安全的路径,以使机器人在环境中自主导航并完成任务。传统的路径规划算法存在着计算复杂度高和易陷入局部最优等问题。为了克服这些问题,本论文基于改进的粒子群算法,提出了一种新的机器人路径规划方法。通过对粒子群算法的改进,引入了自适应参数控制策略和多目标优化技术,以提高算法的收敛性和搜索能力。实验结果表明,所提出的算法在机器人路径规划中具有较好的性能和效果。关键词:机器人;路径规划

改进粒子群算法在移动机器人路径规划中的应用研究.docx
改进粒子群算法在移动机器人路径规划中的应用研究粒子群算法(ParticleSwarmOptimization,PSO)是一种经典的优化算法,源于对鸟群、鱼群等智能集体行为的研究。它模拟了群体实现目标的过程,通过协作和信息交流,找到最优解。随着移动机器人技术的不断发展,路径规划是一个至关重要的问题。本文将探讨如何应用改进的粒子群算法于移动机器人路径规划中。首先,我们需要了解粒子群算法的原理。PSO是一种种群智能算法,通过模拟鸟群中鸟的行为,寻找搜索空间中的最优解。在粒子群算法中,问题的解被描述为一个粒子的位

改进的蜂群算法在机器人路径规划中的应用.docx
改进的蜂群算法在机器人路径规划中的应用改进的蜂群算法在机器人路径规划中的应用摘要:机器人路径规划是机器人基本的问题之一。有效地规划机器人的路径可以提高其效率和安全性。蜂群算法作为一种启发式优化方法,已在许多领域得到了应用。本文介绍了蜂群算法的基本原理,并将其应用于机器人路径规划问题。为了进一步优化蜂群算法在路径规划中的性能,本文还提出了一种改进的蜂群算法,并通过实验验证了其效果。实验结果表明,改进的蜂群算法在机器人路径规划中具有良好的效果和应用前景。关键词:机器人路径规划;蜂群算法;优化;改进1.引言机器

改进的DDPG算法在机器人路径规划中的应用.pptx
改进的DDPG算法在机器人路径规划中的应用目录添加章节标题DDPG算法的概述DDPG算法的基本原理DDPG算法的优缺点DDPG算法的应用场景改进的DDPG算法改进的DDPG算法的提出背景改进的DDPG算法的主要改进点改进的DDPG算法的优势和效果改进的DDPG算法在机器人路径规划中的应用机器人路径规划问题的描述改进的DDPG算法在机器人路径规划中的实现过程改进的DDPG算法在机器人路径规划中的实验结果和分析与其他算法的比较和分析改进的DDPG算法与其它路径规划算法的比较各种算法在不同场景下的适用性和优劣分