
攻击型无人机任务规划系统浅析.pdf

qw****27

1/4
2/4
3/4
4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
攻击型无人机任务规划系统浅析.pdf
万方数据m摊用攻击型无人机任务规期系统浅析精确要求的任务或行动来说显得更为重要,例如一,攻击型无人机任务规戈U系统a句祷点由于现代战争中地面防空火力的加强以及雷达系统具体较强的捕捉目标能力,战时反应的时间越来越短,无人机受到敌方地面威胁程度也随之增大,盲目的进入战场实施攻击会造成极大的损失,简单的人为决策也不可能对复杂多变的战场环境做出客观全面的评价。因此无人机具有协同任务规划的能力,特别是那些对于执行时间有同时发起攻击、协同目标识别与侦察、压制敌防空阵地(SEAD)等等。一般采用的战法是“群狼战术”,即
无人机任务规划系统.pdf
无人机任务规划系统目前国内无人机任务规划技术综述高雨青1王国宏2曾安里3戴伟41.1国内无人机技术研究领域1.2无人机任务规划概念1.3无人机任务规划有关术语(1广州慧海电子科技有限公司北京分公司;2空军装备研究院雷达与对抗研究所;3中科院自动化所军工部;4国际关系学院特战指挥系)摘要随着航模时代进入无人机时代,对无人机任务规划系统的迫切需求日益增长。结合无人机三类主要任务(侦察、干扰、攻击)和无人机战术编队以及与航空兵战术协同,根据具体应用领域.需要提高规划效率与精确性:通过研究国内外无人机规划系统.结
无人机任务规划系统需求分析.pdf
无人机檽殦檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽殦檽檽檽无人机任务规划系统需求分析檽殦檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽檽殦戴定川盛怀洁赵域摘要通过对现代战场条件下无人机发展趋势、作在不断加强。因此,现代无人机作战使用呈现出如战使用特点及无人机任务规划过程的分析,指出了无人机下特点。作战使用人员急需智能任务规划工具的支持。介绍了任务1.1组织协调复杂化规划系统的概念,分析了无人机任务规划系统的需求,为发未来的信息化战场
基于SVM的对地攻击型无人机作战效能评估方法.pdf
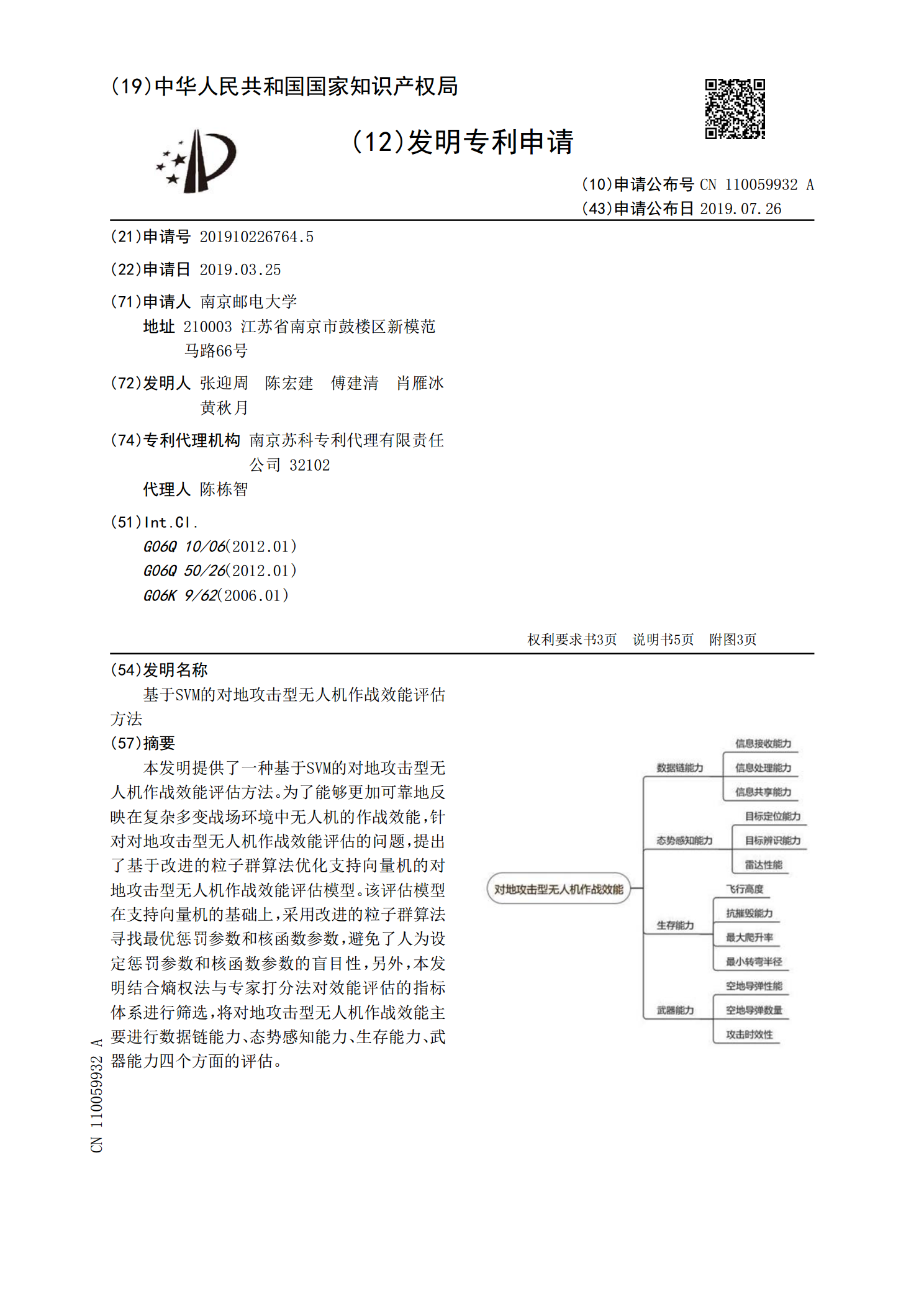
本发明提供了一种基于SVM的对地攻击型无人机作战效能评估方法。为了能够更加可靠地反映在复杂多变战场环境中无人机的作战效能,针对对地攻击型无人机作战效能评估的问题,提出了基于改进的粒子群算法优化支持向量机的对地攻击型无人机作战效能评估模型。该评估模型在支持向量机的基础上,采用改进的粒子群算法寻找最优惩罚参数和核函数参数,避免了人为设定惩罚参数和核函数参数的盲目性,另外,本发明结合熵权法与专家打分法对效能评估的指标体系进行筛选,将对地攻击型无人机作战效能主要进行数据链能力、态势感知能力、生存能力、武器能力四个

基于离差最大化的对地攻击型无人机作战效能评估.docx
基于离差最大化的对地攻击型无人机作战效能评估基于离差最大化的对地攻击型无人机作战效能评估摘要:随着无人机技术的不断发展,对地攻击型无人机在现代战争中的应用越来越广泛。作战效能评估是评价无人机系统性能的重要手段之一。本文以离差最大化为基础,探讨了对地攻击型无人机作战效能评估的方法和关键因素,并提出了几个评估指标。通过对于离差最大化理论的应用,可以更为准确地评估对地攻击型无人机的作战效能,提供科学依据和决策支持。1.引言对地攻击型无人机是一种具有高度自主性和灵活性的作战平台,可以执行各种任务,如巡逻、侦察、精