
纯电动汽车电控系统关键技术研究ppt.ppt

天马****23


1/10
2/10
3/10
4/10

5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共34页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

纯电动汽车电控系统关键技术研究ppt.ppt
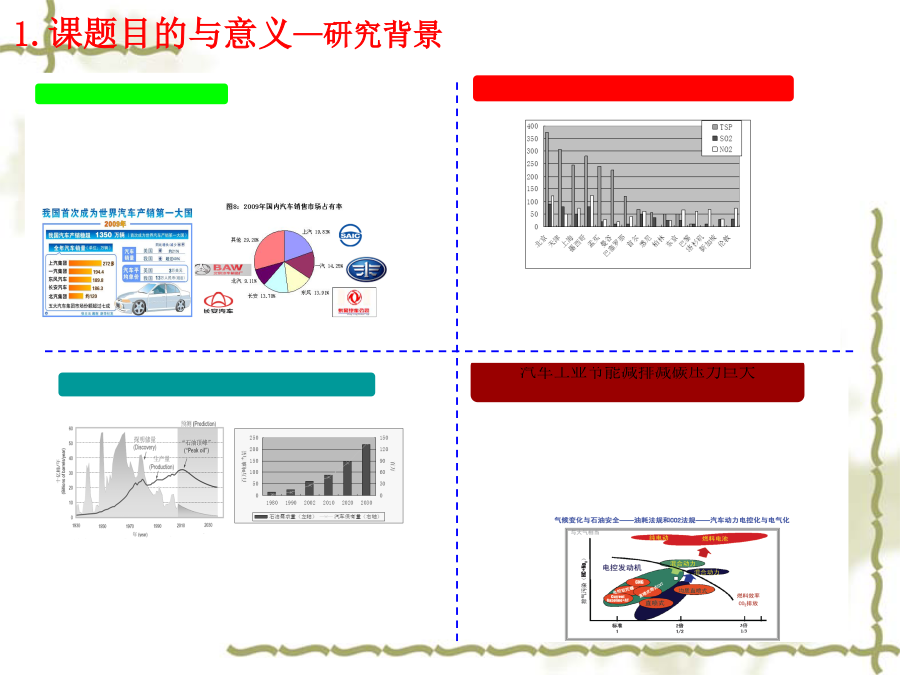
12纯电动汽车可最大幅度减低燃油消耗和改善排放;是近期节能与新能源汽车发展战略的主流。整车电子控制系统(VCU)是电动汽车动力系统集成的核心部件,是体现整车企业自主知识产权和产品水平的核心技术;技术成熟度及产品水平直接影响整车的动力性、安全性及经济性,是纯电动汽车产业化成功与否的关键技术;是促进节能与新能源汽车创新体系和产业链形成的不可或缺的关键环节,具有重要的战略意义。VCU关键技术研究和产品开发有助于推动电动汽车产业化进程,符合国家节能减排发展战略;有利于突破外国公司的技术垄断,尽快掌握纯电动汽车的关
电动汽车电控系统的关键性技术研究.doc
河南省科技攻关计划项目申请书项目名称:纯电动汽车电子控制单元技术研究项目领域:□农业□工业□社会发展申请单位(签章):协作单位:推荐部门(签章):填报日期:2年月日河南省科学技术厅制填报说明1.根据《河南省科技攻关计划管理措施》规定,申报省科技攻关计划项目必须填报《河南省科技攻关计划项目申请书》。2.“项目申请书”经省直主管部门、省辖市(扩权县、市)科技主管部门、国家级或省级高新技术开发区管委会签订意见并盖章后一式五份报送。3.“项目申请书”旳内容必须真实、所附材料齐全,规定项目研究、开发目旳明确,内容重

纯电动汽车电控系统研制.docx
纯电动汽车电控系统研制摘要:随着环保和节能意识的日益增强,纯电动汽车作为新能源车辆逐渐成为未来发展方向。纯电动汽车的核心技术之一就是电控系统。本文以纯电动汽车电控系统研制为主题,通过对现有电控系统的研究和分析,提出了一些优化建议,以促进纯电动汽车的发展。第一章纯电动汽车概述1.1纯电动汽车的定义1.2纯电动汽车的优缺点分析1.3纯电动汽车的发展历程1.4纯电动汽车的市场前景第二章纯电动汽车电控系统概述2.1纯电动汽车的基本构成2.2纯电动汽车电控系统的分类2.3纯电动汽车电控系统的功能2.4纯电动汽车电控

纯电动汽车电控系统研制的任务书.docx
纯电动汽车电控系统研制的任务书任务书题目:纯电动汽车电控系统研制研究背景:随着电动汽车发展的迅速,越来越多的消费者开始把目光投向纯电动汽车。与传统的燃油汽车相比,纯电动汽车具有环保、经济等优势。电控系统是纯电动汽车的核心技术之一,它的质量和性能直接影响车辆的续航里程、安全性、驾驶舒适性和使用寿命等等。因此,充分开发和提升电控系统的性能水平,成为了目前电动汽车行业的重要研究方向。研究内容:从整体上把握电控系统的基本原理和研制方法,深入分析系统中各组件的功能特性,重点完成以下任务:1.设计电控系统的框架及功能

纯电动汽车能量管理系统关键技术研究的任务书.docx
纯电动汽车能量管理系统关键技术研究的任务书一、任务背景随着全球能源危机和环境问题的不断加剧,能源和环境已经成为社会经济发展的瓶颈。汽车作为现代人必备的交通工具之一,是能源消耗和环境污染的重要来源。因此,研究和开发低碳、环保的汽车技术已经成为全球各国的重要发展方向。纯电动汽车是一种全新的汽车类型,以电池为能源,完全没有尾气排放,具有低噪音、高效能、环保等优点,是当前汽车技术中的一大热点。然而,纯电动汽车的发展还面临一些技术瓶颈,尤其是能量管理系统的关键技术研究。二、任务目标本研究的目标是深入研究纯电动汽车能