
移动机器人同时定位与地图创建研究.pdf

qw****27


1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共79页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
移动机器人同时定位与地图创建研究.pdf
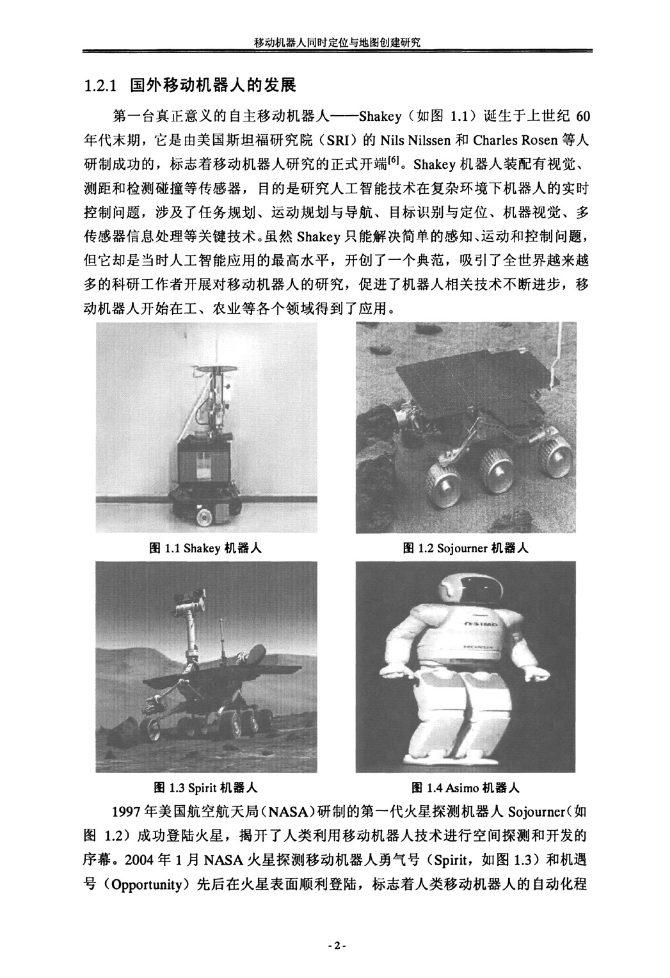
湖南大学硕士学位论文移动机器人同时定位与地图创建研究姓名:张路金申请学位级别:硕士专业:控制科学与工程指导教师:孙炜20090415再次,在所构建的框架下,对基于扩展卡尔曼滤波的SLAM方法(EKF.SLAM)对神经网络的在线学习。通过基于EKF神经网络的运动学模型误差补偿的SLAM摘要在未知环境下,移动机器人要实现自主探索,必须具备对环境的感知、理解和完成自身定位的能力,也就是所谓的同时定位与地图创建(SLAM)能力。移动机器人的同时定位与地图创建是当前移动机器人研究领域的热点,是实现移动机器人完全自主

基于全景视觉的移动机器人同时定位与地图创建方法研究.docx
基于全景视觉的移动机器人同时定位与地图创建方法研究移动机器人在现代工业和服务领域中发挥着越来越重要的作用。为了使机器人更加灵活地适应不同环境下的工作任务,同时定位与地图创建技术成为了现代机器人领域的研究热点之一。全景视觉技术作为一种无需外部传感器的自主感知技术,已经被广泛应用于机器人定位与地图创建。本文主要研究了一种基于全景视觉的移动机器人同时定位与地图创建方法,主要包括以下几个方面:全景视觉技术的原理以及在机器人领域中的应用、同时定位与地图创建技术的原理、基于全景视觉的同时定位与地图创建方法的研究思路与

面向智能移动机器人的同时定位与地图创建研究的开题报告.docx
面向智能移动机器人的同时定位与地图创建研究的开题报告一、选题背景随着科技的不断进步,智能机器人已成为现代制造业、服务业、医疗等领域中不可或缺的工具。其中,智能移动机器人具有无人化、自主化等特点,在物流、工业生产等领域发挥了重要作用。同时,智能移动机器人的使用也已从业界逐渐延伸至家庭领域,成为人们日常生活中越来越常见的产品。对于一个智能移动机器人来说,它需要精确、高效地定位自身的位置,才能够更好地执行任务,完成各种工作。同时,机器人需要准确地绘制出周围的地图,并且根据地图来规划巡航路线,避免碰撞等问题。因此

移动机器人同时定位与地图创建自适应算法研究的中期报告.docx
移动机器人同时定位与地图创建自适应算法研究的中期报告1.研究背景移动机器人定位和地图创建是机器人领域中的基本问题,定位精度和地图准确度对机器人行动至关重要。随着移动机器人应用场景的不断扩大,对于定位和地图的要求也越来越高,传统定位和地图方法难以满足需求,因此需要新的自适应算法来解决这个问题。2.研究目的本文旨在研究移动机器人自适应算法,实现同时定位和地图创建,并比较不同算法的优缺点,找到适用于不同场景的最优算法,提高机器人定位和地图创建的准确性和稳定性。3.研究内容(1)研究不同的算法进行移动机器人同时定

移动机器人同时定位与地图构建研究.docx
移动机器人同时定位与地图构建研究移动机器人同时定位与地图构建(SLAM)是机器人领域研究的重要问题之一,涉及环境感知和地图构建等多个方面,具有广泛的应用前景。SLAM是指移动机器人在未知环境中同时进行自身定位和环境地图构建的技术。在这个过程中,机器人需要借助各种传感器获取环境信息,同时将已有的信息进行统计和融合,从而实现自身定位和地图构建。SLAM技术有很多应用,如智能家居、无人机、自动驾驶等。在无人车的应用中,SLAM技术可以帮助车辆实现自动导航和路径规划,确保行驶安全。在智能家居的应用中,SLAM技术