
一种基于姿态指导的步态识别方法.pdf

一只****iu

1/10

2/10

3/10
4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于姿态指导的步态识别方法.pdf
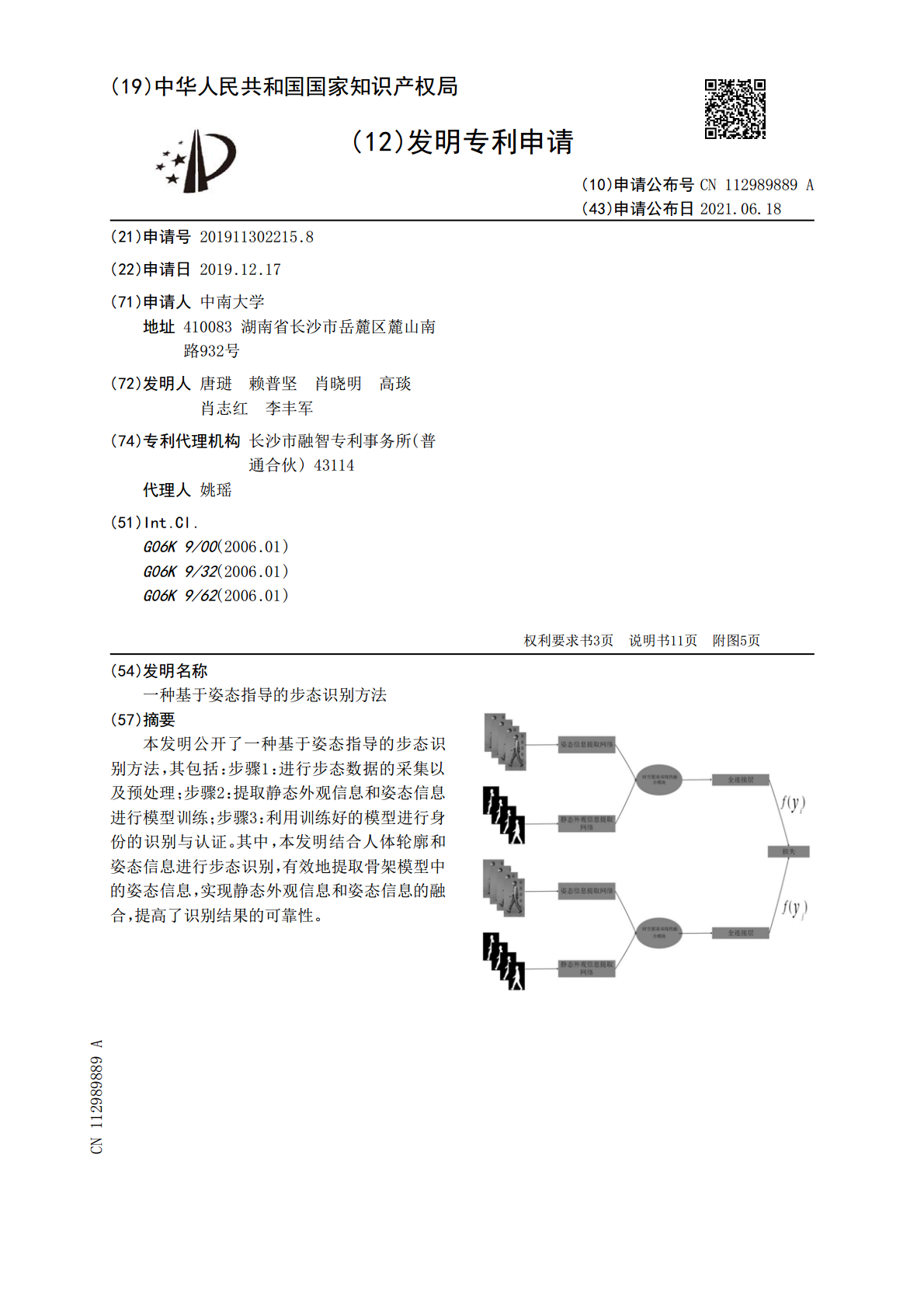
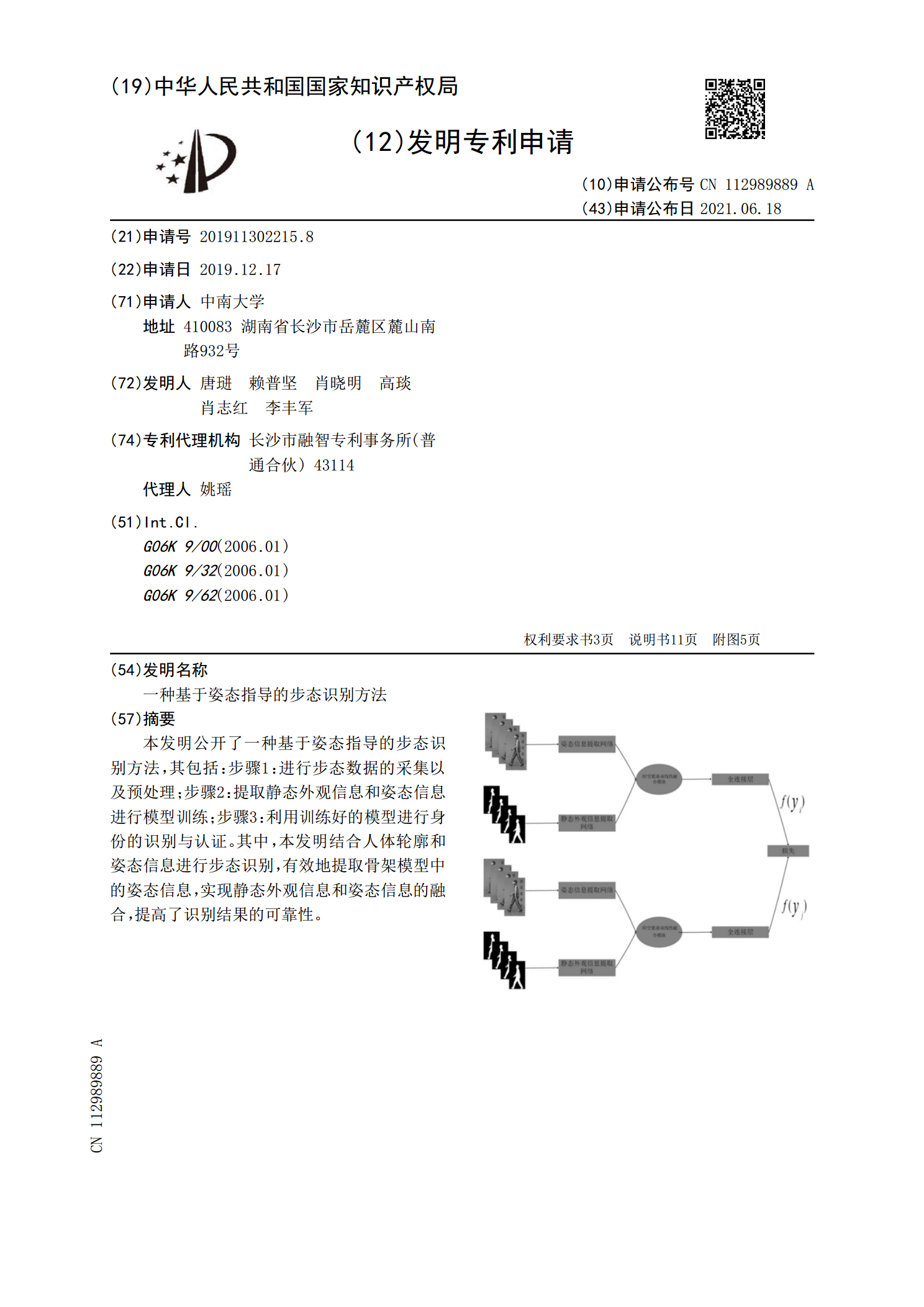
本发明公开了一种基于姿态指导的步态识别方法,其包括:步骤1:进行步态数据的采集以及预处理;步骤2:提取静态外观信息和姿态信息进行模型训练;步骤3:利用训练好的模型进行身份的识别与认证。其中,本发明结合人体轮廓和姿态信息进行步态识别,有效地提取骨架模型中的姿态信息,实现静态外观信息和姿态信息的融合,提高了识别结果的可靠性。

基于姿态与压力信息的步态识别方法的任务书.docx
基于姿态与压力信息的步态识别方法的任务书一、背景步态识别是一种利用传感器技术对人体行走过程进行监测并进行特征提取和分析的技术。步态识别有很多应用场景,如运动康复、智能机器人等。步态识别的最终目的是通过对人类步态特征的识别,进而了解人类的行动轨迹,从而实现人机智能交互的目的。为了使得步态识别技术更加准确和智能化,需要引入更多的信息源,例如姿态和压力信息。二、任务目标本项目的目标是研究基于姿态与压力信息的步态识别方法。具体地,本项目需要完成以下任务:1.收集姿态及压力信息数据集。2.探索姿态和压力对步态表征的
一种基于步态的身份识别方法.pdf
本发明提供了一种基于步态的身份识别方法,旨在于解决现有技术中没有基于步态的身份识别方法的问题,其技术要点在于:包括以下步骤:一、提取步态轮廓;二、检测步态周期;三、提取有效的步态特征并对步态特征进行处理,在提取步态特征前,在步态序列中提取出一个周期的子序列;四、模式分类,利用分类器来完成分类识别。本发明比生物识别技术更加的简单实用,对低质量的侧面轮廓具有很好的适应性,并能够快速地进行身份识别,对于逮捕罪犯有很大的帮助。

一种基于改进时空步态能量图的步态身份识别方法.pdf
本发明提供一种基于改进时空步态能量图的步态身份识别方法,将改进时空步态能量图与卷积神经网络GoogLeNet相结合建立步态识别模型,以改进时空步态能量图作为输入进行步态识别特征提取和分类,提取人体下半身关节间规律变化,摆幅特征,利用伪彩色编码技术将时序信息映射到下半身关节点间上,最大限度保留步态模板内部动态信息,由此获取更丰富、有效的步态模板,生成改进时空步态能量图。解决了基于模型步态识别时间长、建模复杂,基于图像步态识别跨视角准确度不高的缺点,提高现代生物行为特征识别技术,保证远距离身份识别安全性的同时

一种基于模态融合的步态识别方法.pdf
本发明提供一种基于模态融合的步态识别方法,属于模式识别技术领域,为解决现有步态识别技术受光照条件以及复杂背景或协变量影响较大,导致轮廓图提取不准确,从而影响识别精度以及由于缺少人体基本属性信息而使其特征表达能力受到限制,同时由于关键点序列是非结构化数据,难以用深度网络进行建模,多采用凭经验人工设计特征的方法,无法最大化挖掘有效的判别特征,影响识别准确率及泛化能力的问题。本发明采用模态融合方式,将具有互补性的人体关键点特征和步态轮廓图特征进行模态融合。人体关键点序列输入图卷积神经网络,提取基于骨架信息的步态