
激光测量系统3激光干涉仪原理.ppt

天马****23

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共37页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

激光测量系统3激光干涉仪原理.ppt
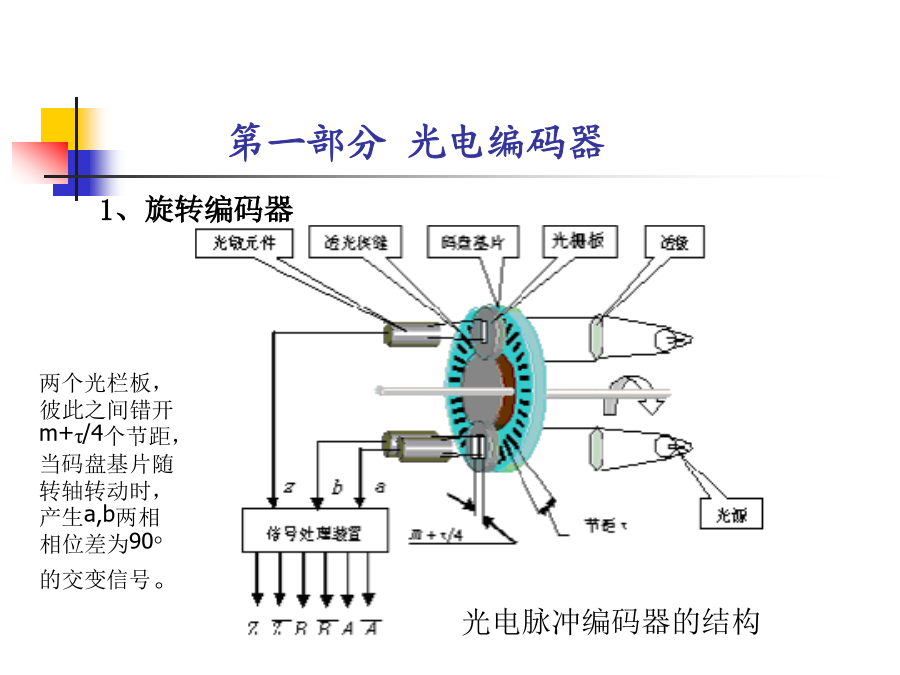
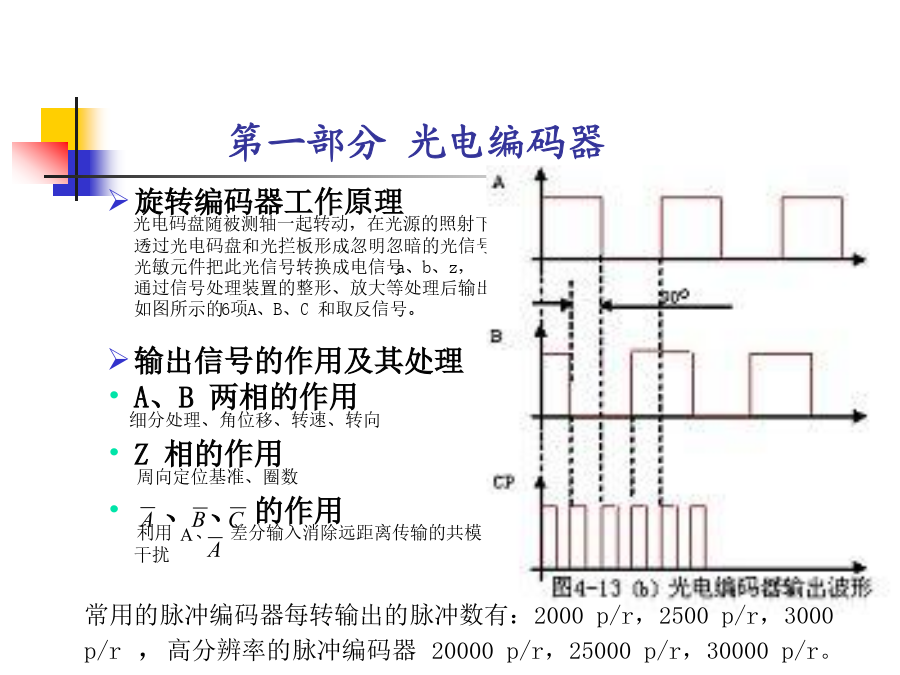
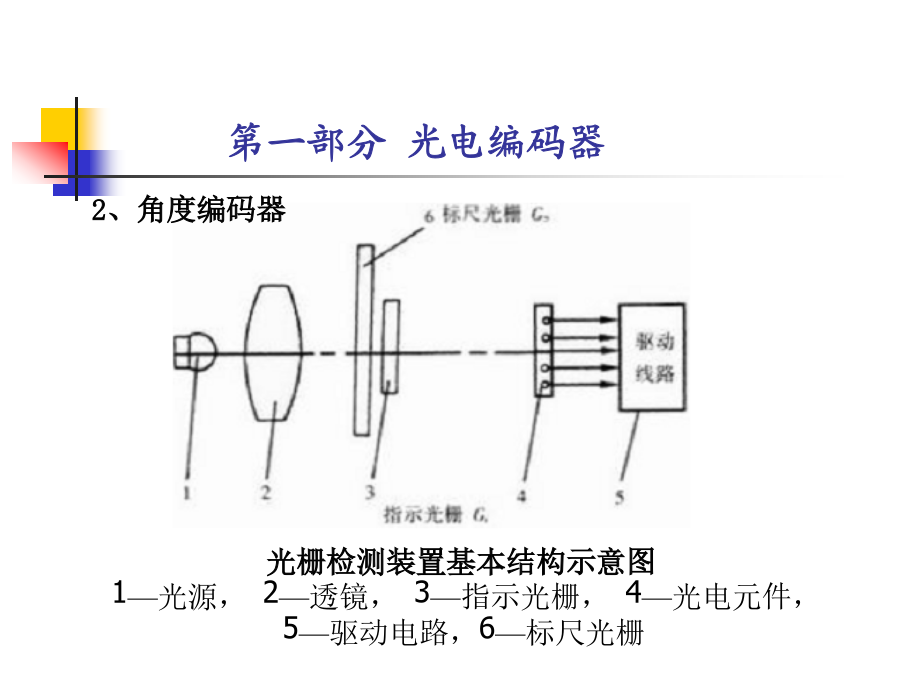
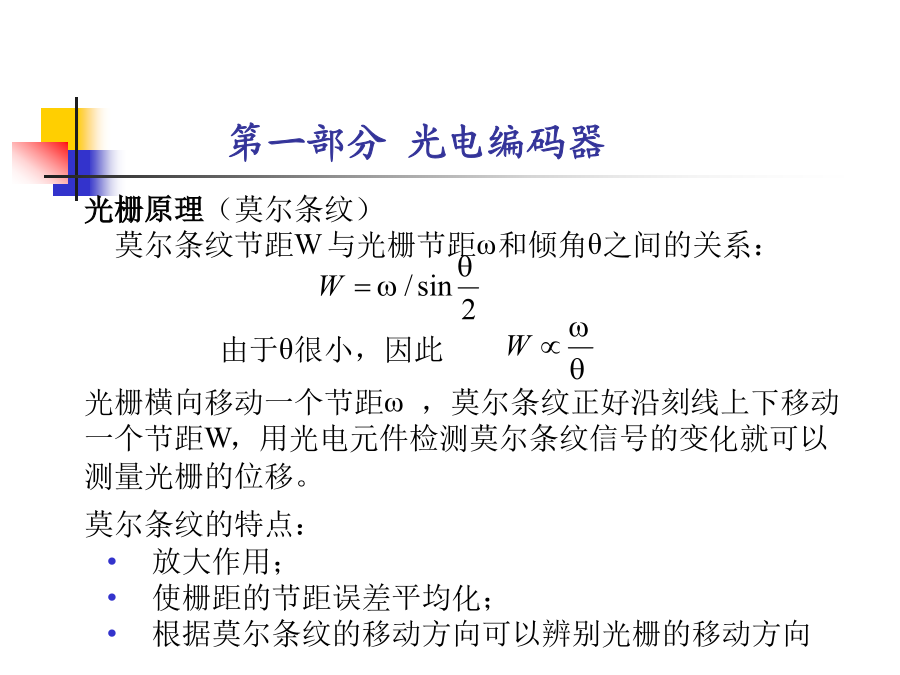
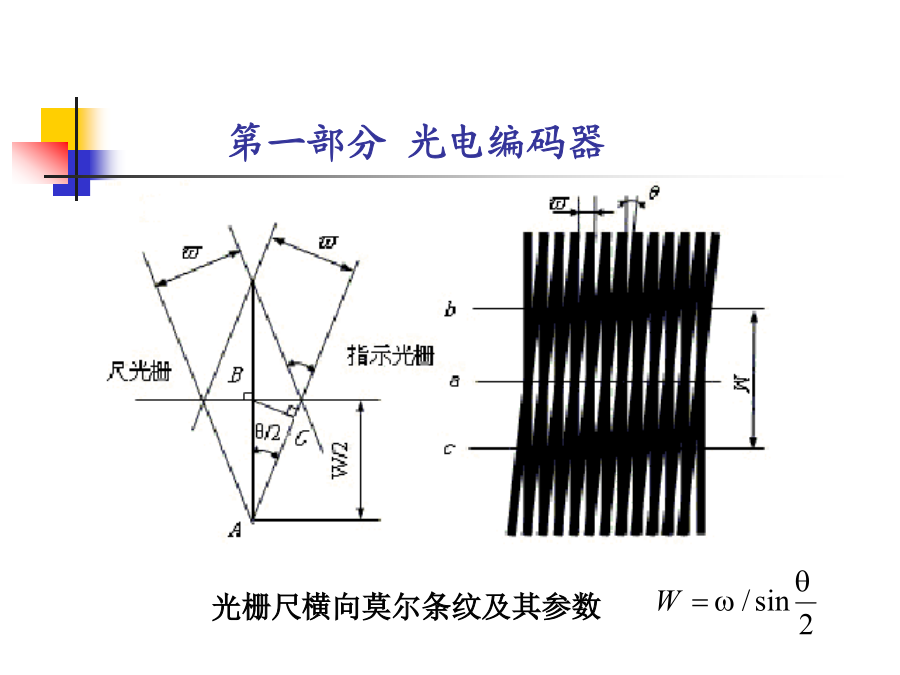
第一章电机控制中的测量元件第一部分光电编码器旋转编码器工作原理光电码盘随被测轴一起转动,在光源的照射下,透过光电码盘和光拦板形成忽明忽暗的光信号,光敏元件把此光信号转换成电信号a、b、z,通过信号处理装置的整形、放大等处理后输出如图所示的6项A、B、C和取反信号。输出信号的作用及其处理A、B两相的作用细分处理、角位移、转速、转向Z相的作用周向定位基准、圈数、、的作用利用A、差分输入消除远距离传输的共模干扰第一部分光电编码器第一部分光电编码器第一部分光电编码器第一部分光电编码器光栅读数头与标尺光栅配合起光电
激光干涉仪测量原理ppt.ppt
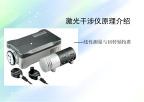
激光干涉仪原理介绍一、基本概念机床精度的21项误差激光的产生激光输出可视为一束正弦波。光的干涉二、激光干涉测量原理二、激光干涉测量原理二、激光干涉测量原理三、RenishawXL-80激光干涉仪测量系统简介三、RenishawXL-80激光干涉仪测量系统简介线性测量回路线性测量安装方式为什麼需要补偿?环境补偿单元XC-80的放置XL-80回转轴校准配置回转轴校准光学回路回转轴校准测量步骤回转轴校准安装方式

双频激光干涉仪测量.docx
激光干涉仪测长原理典型的激光干涉仪由激光器L、偏振分光镜PBS、测量反射镜M、参考反射镜R、光电检测器D、检偏器P和三个λ/4波片Q1、Q2和Q3组成。激光为线偏振光,经偏振分光镜分为E1和E2两线偏振光。当两干涉臂中λ/4波片快轴(或慢轴)与X轴夹角相等且为45度时,两束光通过λ/4波片后均成为圆偏振光,反射后再次通过λ/4波片,又转换为线偏振光,但其振动方向相对原振动方向旋转了90度,且由于两干涉臂光程产生了相位差φ,根据公式:φ=2θ=φ=4πL/λ式中:λ为激光波长,干涉光路的作用是把位移L转变为
激光干涉仪原理介绍.pptx
Slide1Slide2Slide3Slide4Slide5Slide6Slide7Slide8Slide9Slide10Slide11Slide12Slide13Slide14Slide15Slide16Slide17Slide18Slide19Slide20Slide21Slide22Slide23Slide24Slide25Slide26Slide27Slide28Slide29Slide30Slide31Slide32Slide33Slide34

Elden公式法在双频激光干涉仪测量系统的应用.docx
Elden公式法在双频激光干涉仪测量系统的应用标题:Elden公式法在双频激光干涉仪测量系统的应用摘要:双频激光干涉仪是一种常用的精密测量设备,可以测量光程差、物体表面形貌等物理量。本文介绍了一种基于Elden公式法的双频激光干涉仪测量系统的应用。通过对Elden公式的推导及原理分析,结合双频激光干涉仪的原理,探讨了该方法在测量系统中的应用、优势和局限性。实验结果表明,Elden公式法能够提高双频激光干涉仪的测量精度和稳定性,具有较好的应用前景。关键词:Elden公式法;双频激光干涉仪;测量系统;应用1.