
一种用于柔性下肢外骨骼的双向扭绳驱动装置.pdf

靖烟****魔王

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于柔性下肢外骨骼的双向扭绳驱动装置.pdf
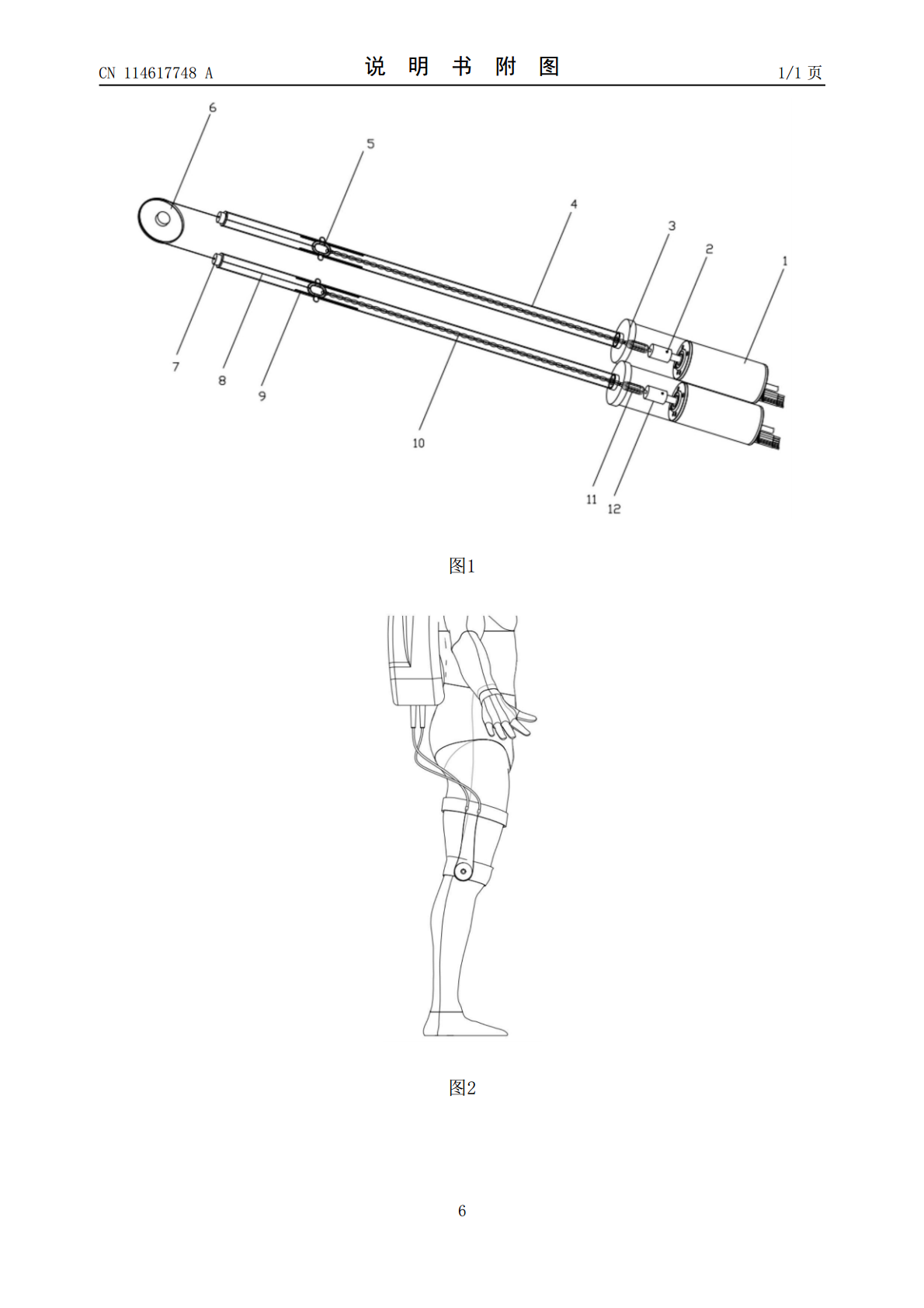
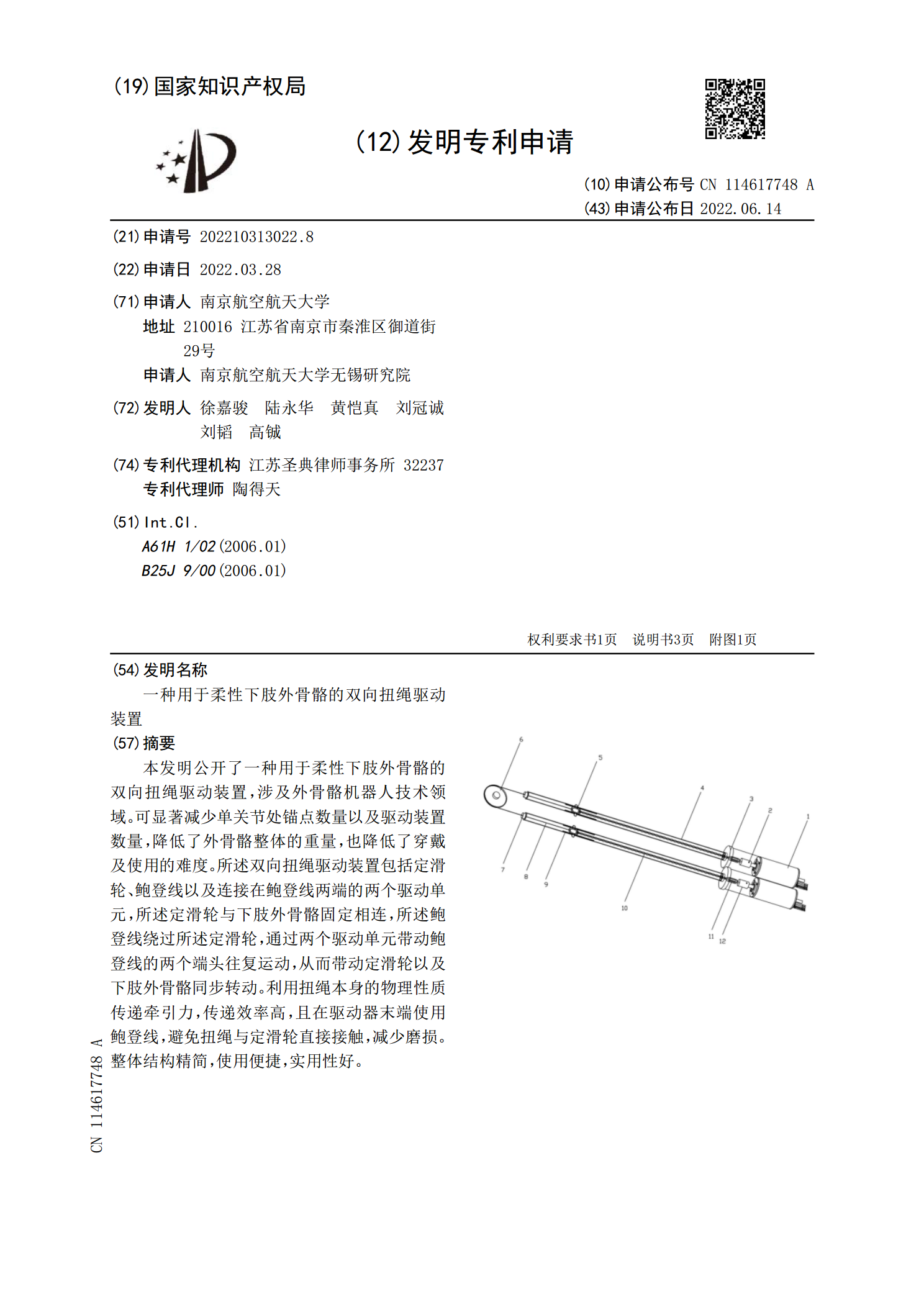
本发明公开了一种用于柔性下肢外骨骼的双向扭绳驱动装置,涉及外骨骼机器人技术领域。可显著减少单关节处锚点数量以及驱动装置数量,降低了外骨骼整体的重量,也降低了穿戴及使用的难度。所述双向扭绳驱动装置包括定滑轮、鲍登线以及连接在鲍登线两端的两个驱动单元,所述定滑轮与下肢外骨骼固定相连,所述鲍登线绕过所述定滑轮,通过两个驱动单元带动鲍登线的两个端头往复运动,从而带动定滑轮以及下肢外骨骼同步转动。利用扭绳本身的物理性质传递牵引力,传递效率高,且在驱动器末端使用鲍登线,避免扭绳与定滑轮直接接触,减少磨损。整体结构精简

基于柔绳传动的外骨骼柔性关节驱动装置.pdf
本发明公开了一种基于柔绳传动的外骨骼柔性关节驱动装置,它包括机架、电机、关节、绕线装置和柔绳,关节的箱体和绕线装置分别与机架固定连接,电机通过联轴器与绕线装置连接;柔绳缠绕在绕线装置上,并且在由绕线装置引出后,柔绳的两端分别与关节的固定轮固定连接。本发明在精确实现传动的同时,较大程度地减轻了外骨骼康复治疗装置的重量,减轻患者的负担。
一种柔性下肢外骨骼.pdf
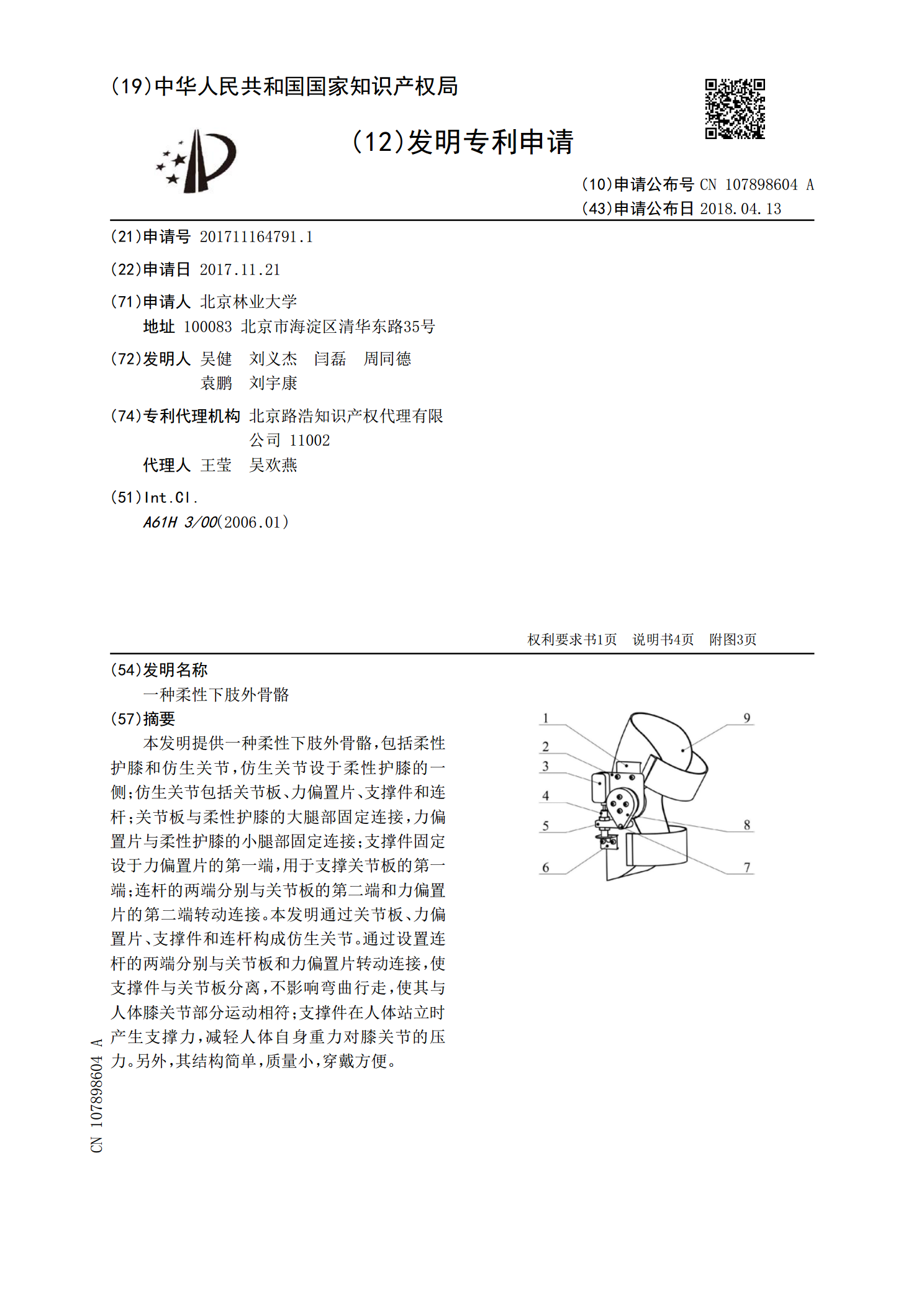
本发明提供一种柔性下肢外骨骼,包括柔性护膝和仿生关节,仿生关节设于柔性护膝的一侧;仿生关节包括关节板、力偏置片、支撑件和连杆;关节板与柔性护膝的大腿部固定连接,力偏置片与柔性护膝的小腿部固定连接;支撑件固定设于力偏置片的第一端,用于支撑关节板的第一端;连杆的两端分别与关节板的第二端和力偏置片的第二端转动连接。本发明通过关节板、力偏置片、支撑件和连杆构成仿生关节。通过设置连杆的两端分别与关节板和力偏置片转动连接,使支撑件与关节板分离,不影响弯曲行走,使其与人体膝关节部分运动相符;支撑件在人体站立时产生支撑力
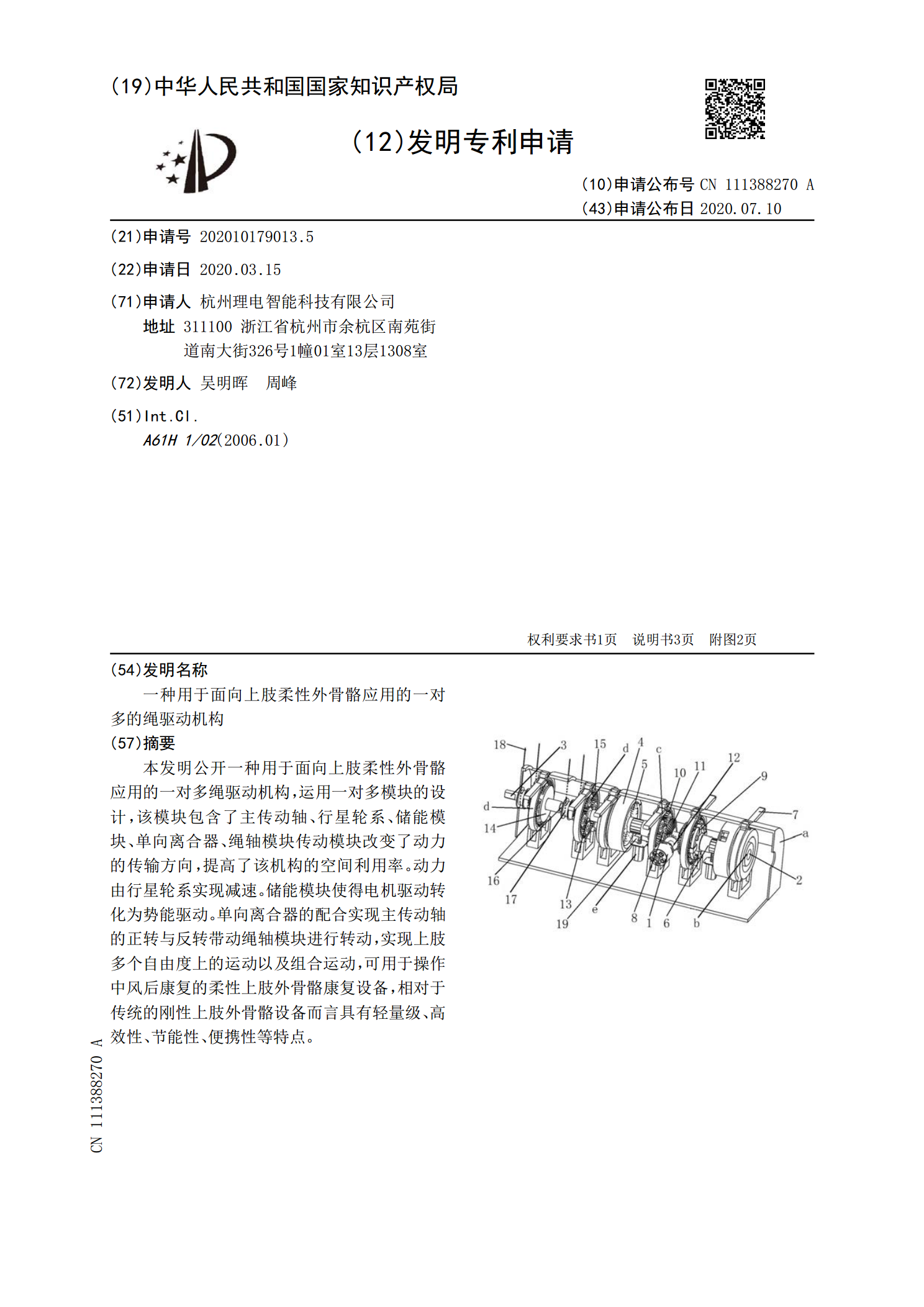
一种用于面向上肢柔性外骨骼应用的一对多的绳驱动机构.pdf
本发明公开一种用于面向上肢柔性外骨骼应用的一对多绳驱动机构,运用一对多模块的设计,该模块包含了主传动轴、行星轮系、储能模块、单向离合器、绳轴模块传动模块改变了动力的传输方向,提高了该机构的空间利用率。动力由行星轮系实现减速。储能模块使得电机驱动转化为势能驱动。单向离合器的配合实现主传动轴的正转与反转带动绳轴模块进行转动,实现上肢多个自由度上的运动以及组合运动,可用于操作中风后康复的柔性上肢外骨骼康复设备,相对于传统的刚性上肢外骨骼设备而言具有轻量级、高效性、节能性、便携性等特点。
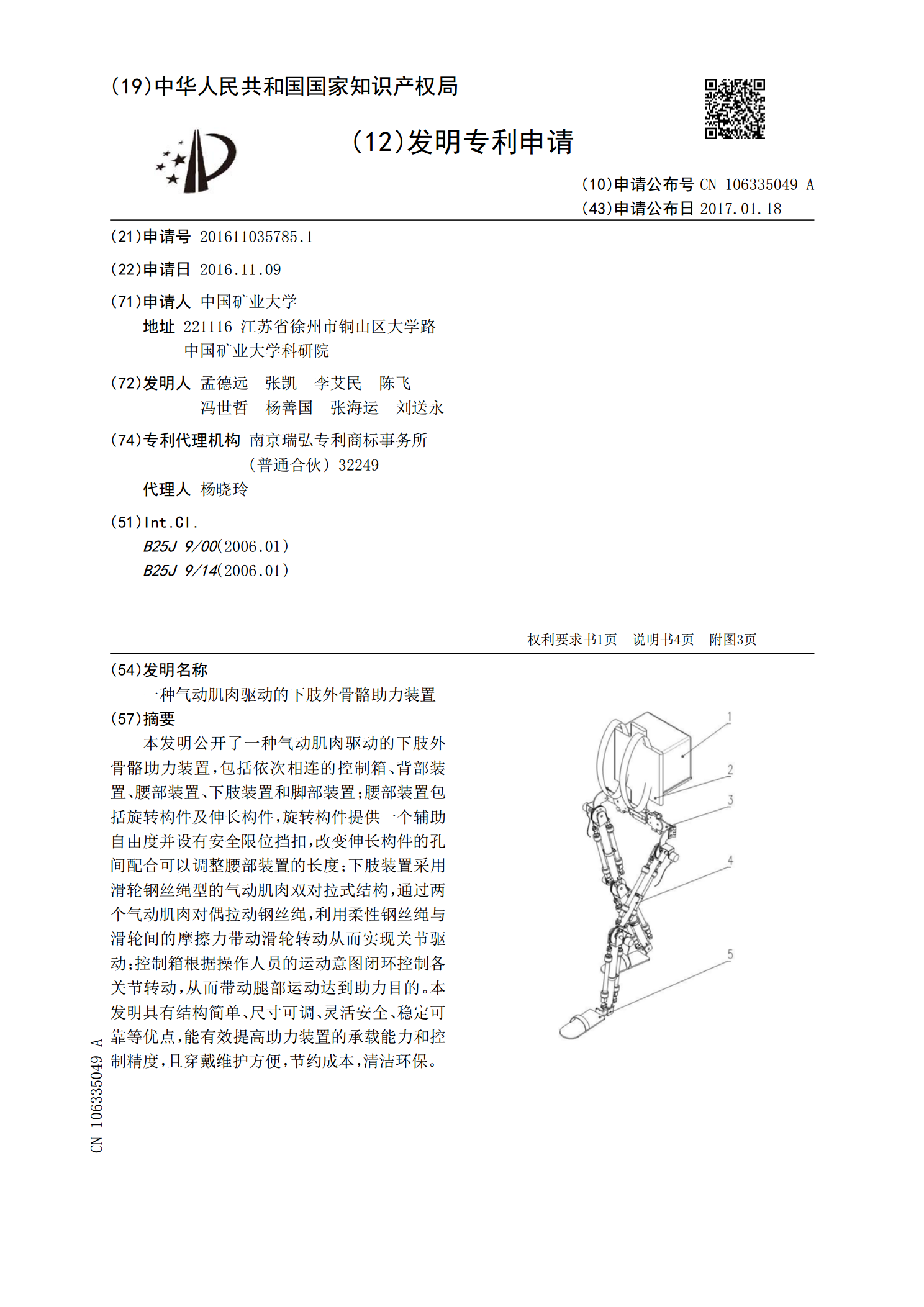
一种气动肌肉驱动的下肢外骨骼助力装置.pdf
本发明公开了一种气动肌肉驱动的下肢外骨骼助力装置,包括依次相连的控制箱、背部装置、腰部装置、下肢装置和脚部装置;腰部装置包括旋转构件及伸长构件,旋转构件提供一个辅助自由度并设有安全限位挡扣,改变伸长构件的孔间配合可以调整腰部装置的长度;下肢装置采用滑轮钢丝绳型的气动肌肉双对拉式结构,通过两个气动肌肉对偶拉动钢丝绳,利用柔性钢丝绳与滑轮间的摩擦力带动滑轮转动从而实现关节驱动;控制箱根据操作人员的运动意图闭环控制各关节转动,从而带动腿部运动达到助力目的。本发明具有结构简单、尺寸可调、灵活安全、稳定可靠等优点,