
基于改进YOLOv5网络的齿轮缺陷视觉检测方法及系统.pdf

听云****君哇

1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于改进YOLOv5网络的齿轮缺陷视觉检测方法及系统.pdf
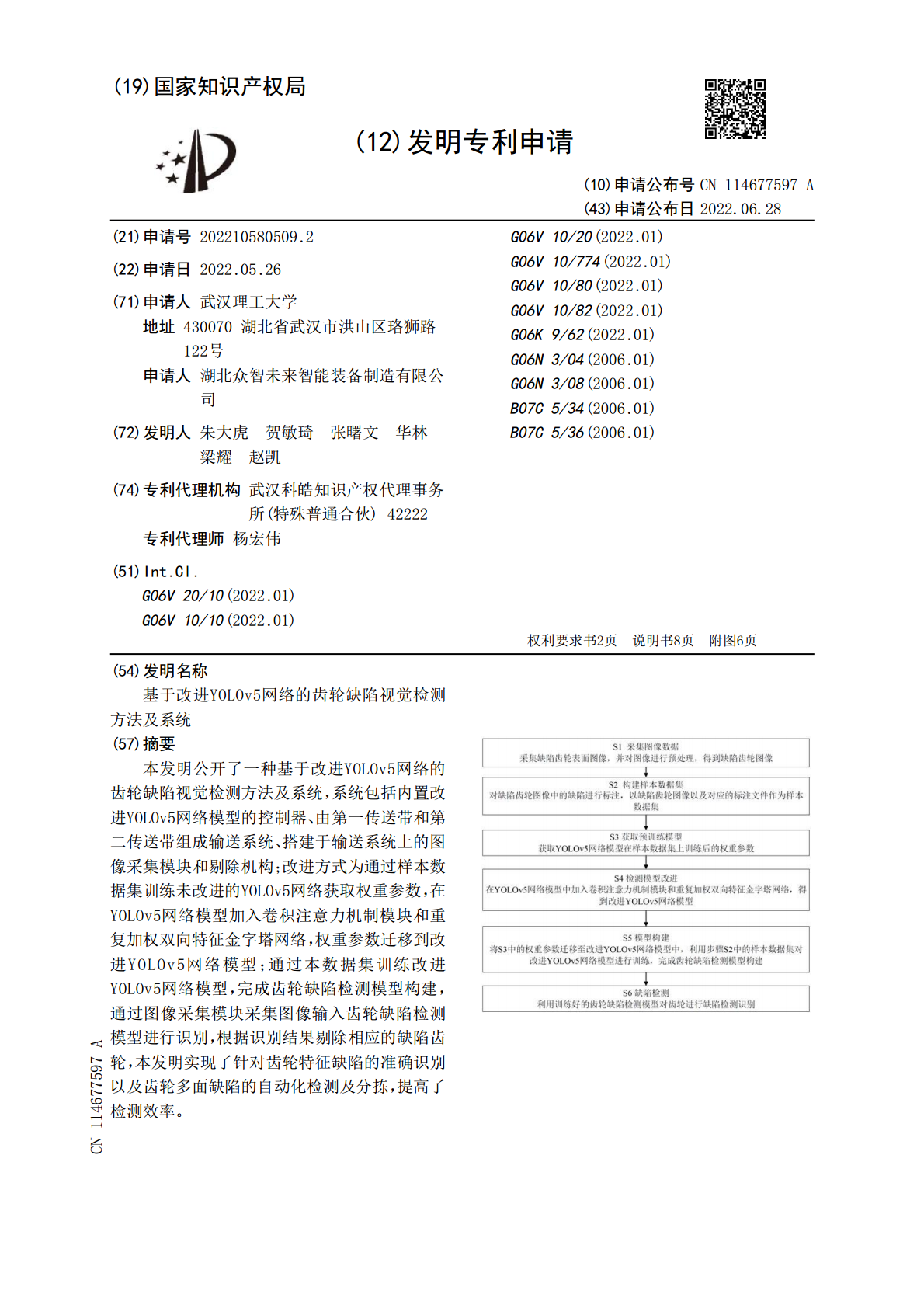
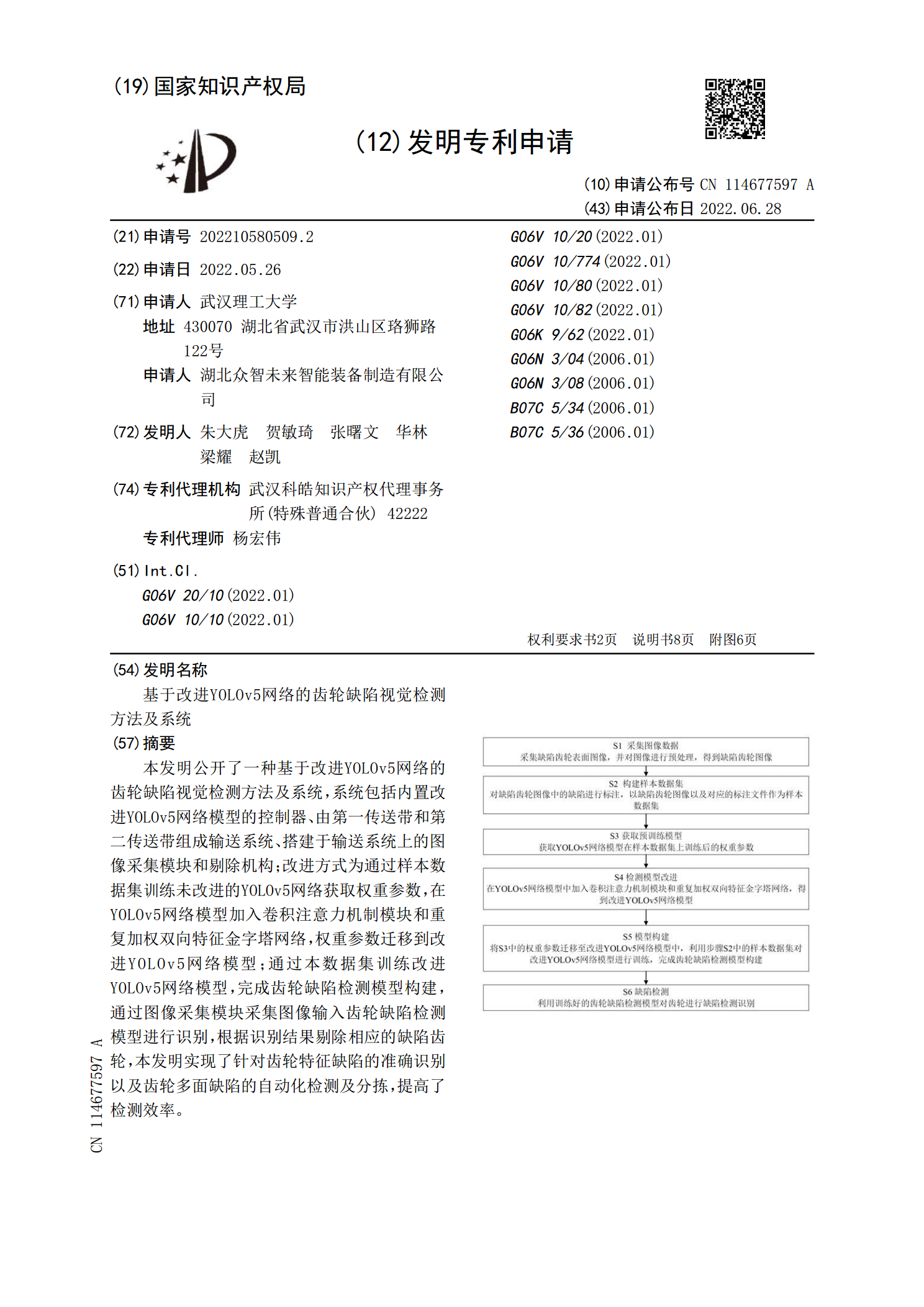
本发明公开了一种基于改进YOLOv5网络的齿轮缺陷视觉检测方法及系统,系统包括内置改进YOLOv5网络模型的控制器、由第一传送带和第二传送带组成输送系统、搭建于输送系统上的图像采集模块和剔除机构;改进方式为通过样本数据集训练未改进的YOLOv5网络获取权重参数,在YOLOv5网络模型加入卷积注意力机制模块和重复加权双向特征金字塔网络,权重参数迁移到改进YOLOv5网络模型;通过本数据集训练改进YOLOv5网络模型,完成齿轮缺陷检测模型构建,通过图像采集模块采集图像输入齿轮缺陷检测模型进行识别,根据识别结果
基于改进YOLOv5的铝表面实时缺陷检测方法及系统.pdf
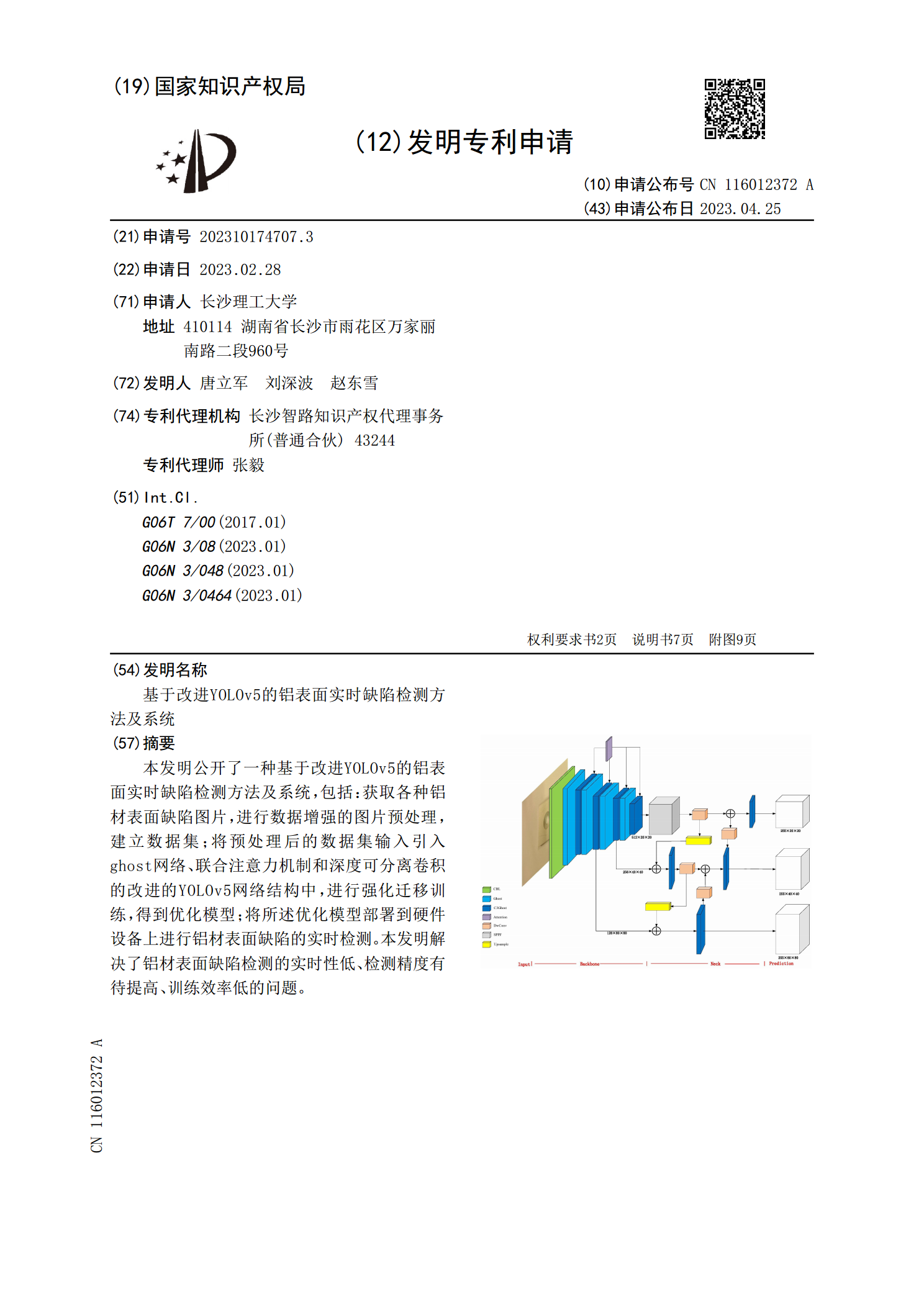
本发明公开了一种基于改进YOLOv5的铝表面实时缺陷检测方法及系统,包括:获取各种铝材表面缺陷图片,进行数据增强的图片预处理,建立数据集;将预处理后的数据集输入引入ghost网络、联合注意力机制和深度可分离卷积的改进的YOLOv5网络结构中,进行强化迁移训练,得到优化模型;将所述优化模型部署到硬件设备上进行铝材表面缺陷的实时检测。本发明解决了铝材表面缺陷检测的实时性低、检测精度有待提高、训练效率低的问题。

基于机器视觉的齿轮端面缺陷检测方法.docx
基于机器视觉的齿轮端面缺陷检测方法标题:基于机器视觉的齿轮端面缺陷检测方法摘要:齿轮作为一种常见的传动装置,在机械和工业领域中扮演着重要的角色。然而,由于生产过程中的各种原因,齿轮可能会出现端面缺陷,这些缺陷会影响其性能和寿命。因此,开发一种高效准确的齿轮端面缺陷检测方法具有重要的意义。本文提出了一种基于机器视觉的齿轮端面缺陷检测方法,通过图像处理和机器学习相结合,实现了对齿轮端面缺陷的自动检测和分类。关键词:机器视觉,齿轮端面,缺陷检测,图像处理,机器学习1.引言齿轮是一种常用的传动装置,广泛应用于各种

基于改进YOLOv5的钢板表面缺陷检测.docx
基于改进YOLOv5的钢板表面缺陷检测1.内容概述本文档旨在介绍一种基于改进YOLOv5的钢板表面缺陷检测方法。我们将回顾YOLOv5的基本原理和结构,然后详细阐述改进措施及其在钢板表面缺陷检测中的应用。我们将展示实验结果和性能分析,最后讨论可能的优化方向和未来工作。通过本文档,读者将了解到改进YOLOv5在钢板表面缺陷检测领域的优越性,以及如何将其应用于实际工程中。1.1背景介绍随着工业制造领域的快速发展,钢板作为重要的基础材料,其表面质量对于产品的整体性能和使用寿命具有至关重要的影响。对钢板表面缺陷进

一种基于计算机视觉的齿轮缺陷检测方法及系统.pdf
本发明涉及图像处理技术领域,提供了一种基于计算机视觉的齿轮缺陷检测方法及系统,所述方法包括下述步骤:通过PCI插槽获取图像采集卡采集到的被测齿轮的源图像;对获取得到的被测齿轮的源图像进行包括灰度变换、滤波去噪和阈值分割在内的预处理操作,得到被测齿轮的齿轮参数;对得到的被测齿轮的齿轮参数进行形态学参数分析,获取包含可能存在缺陷的齿数的分析结果。本发明实施例不仅测量速度快、而且精度高,满足了齿轮常规参数测量的功能要求,大批量工业生产过程中可以大大提高生产效率和生产的自动化程度,可满足生产实际中的测量精度要求,