
一种智能下肢康复训练轮椅及训练方法.pdf

康平****ng

1/8

2/8

3/8
4/8
5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种智能下肢康复训练轮椅及训练方法.pdf
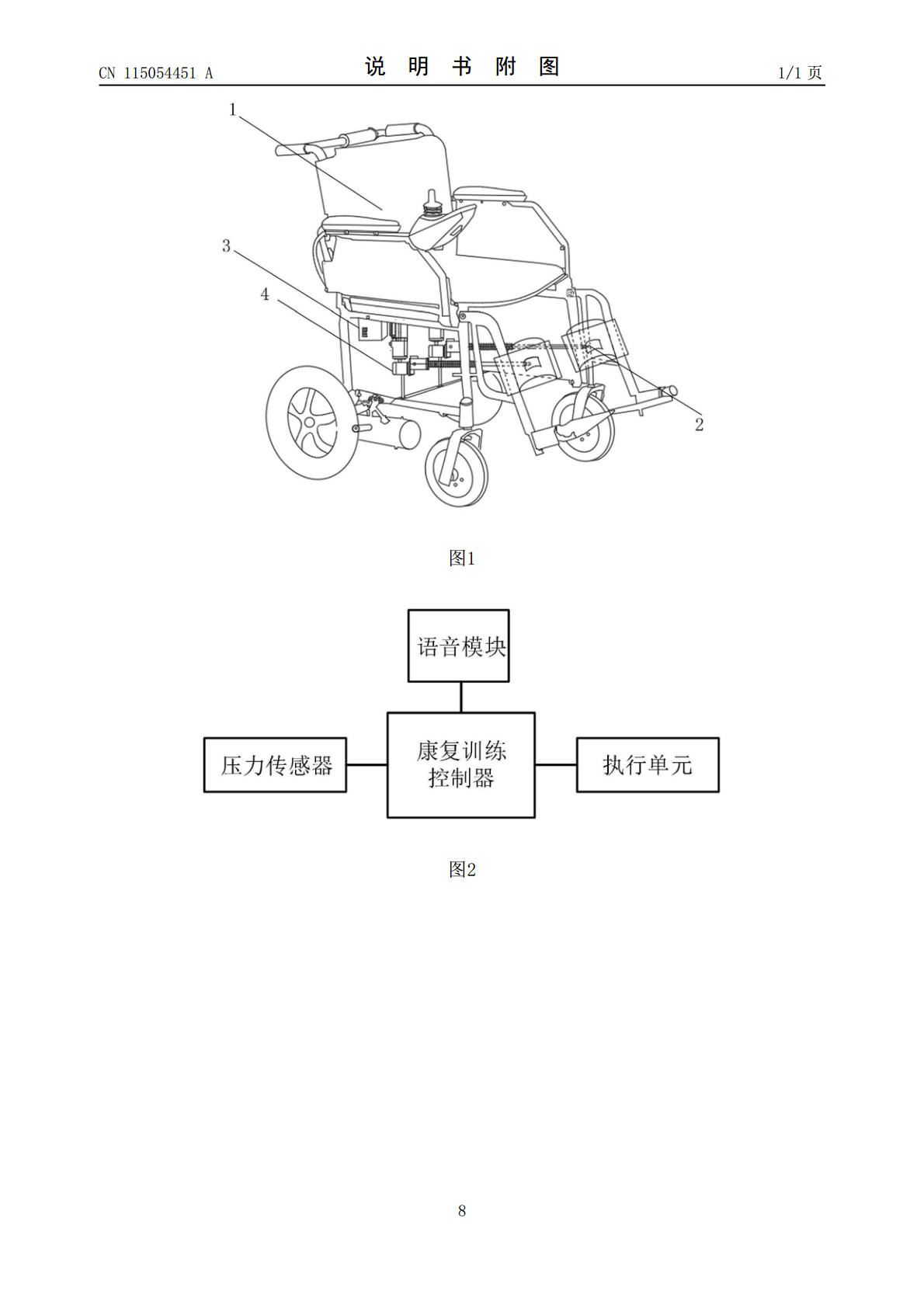
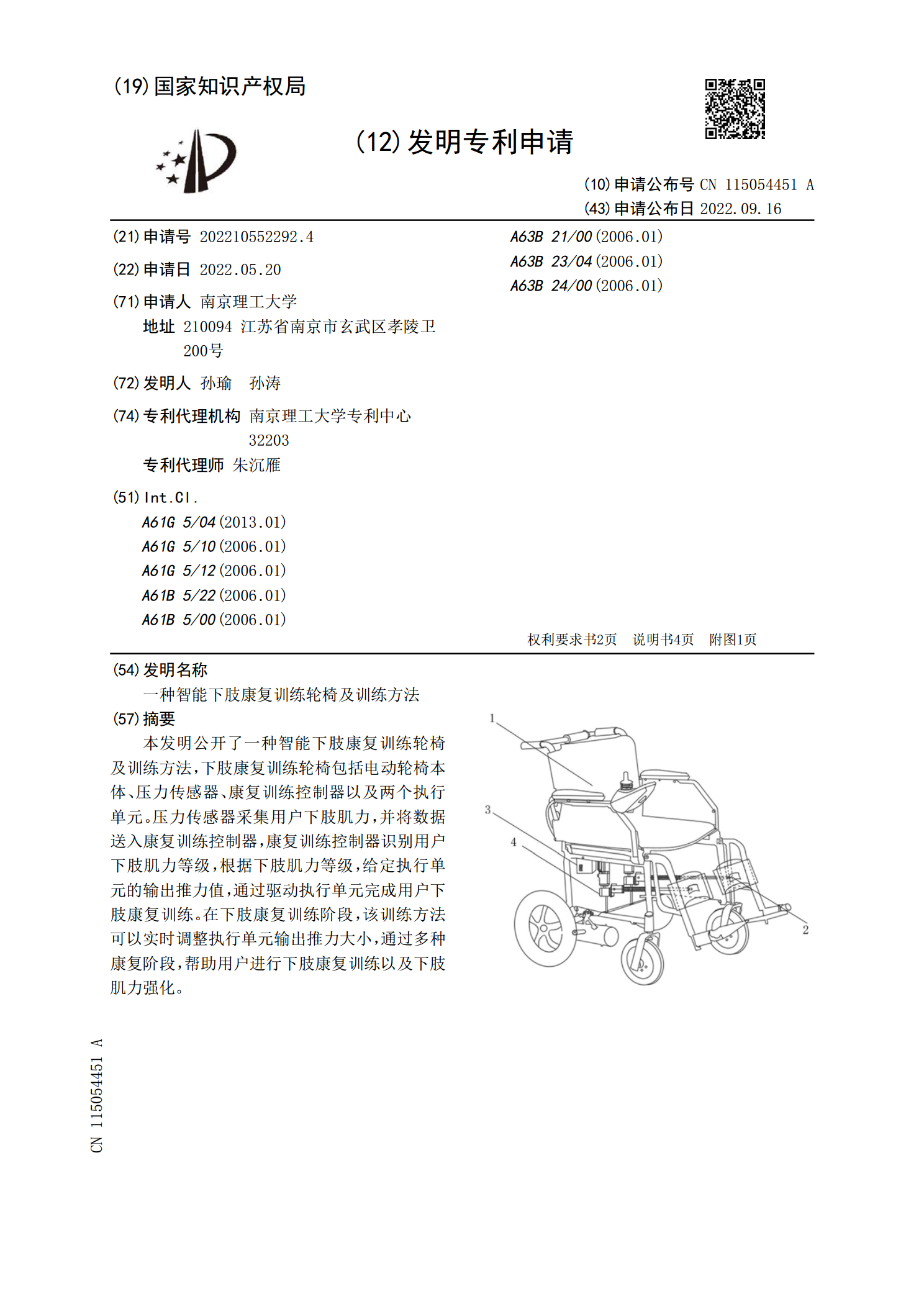
本发明公开了一种智能下肢康复训练轮椅及训练方法,下肢康复训练轮椅包括电动轮椅本体、压力传感器、康复训练控制器以及两个执行单元。压力传感器采集用户下肢肌力,并将数据送入康复训练控制器,康复训练控制器识别用户下肢肌力等级,根据下肢肌力等级,给定执行单元的输出推力值,通过驱动执行单元完成用户下肢康复训练。在下肢康复训练阶段,该训练方法可以实时调整执行单元输出推力大小,通过多种康复阶段,帮助用户进行下肢康复训练以及下肢肌力强化。

一种带下肢康复训练功能的智能轮椅.pdf
一种带下肢康复训练功能的智能轮椅,涉及到智能轮椅技术领域。解决现有的智能轮椅无法实现下肢康复训练功能的技术不足,包括有轮椅本体和脚踏机构;脚踏机构与椅支架前后摆动铰接;椅支架上设有随椅轮行走往返驱动所述的脚踏机构前后摆动的下肢康复训练模块;所述的椅支架上还设有生物刺激反馈模块,生物刺激反馈模块上连接有第一电极组和第二电极组。患者下肢进行屈曲和伸直康复训练,同时,生物刺激反馈模块放电刺激,有效提升下肢康复训练效果,有利于显著改善偏瘫肢体的运动功能与整体功能,训练患者的独立生活能力,提升偏瘫患者生活自信,促进
一种轮椅式下肢康复训练设备及其训练方法.pdf
本发明涉及康复辅具领域,具体公开了一种轮椅式下肢康复训练设备及其训练方法,解决现有技术中的人体下肢单瘫、偏瘫、肌无力、运动不协调等腿部运动功能障碍患者,通过自我康复时间比较长,且康复效果慢的问题。本发明一种轮椅式下肢康复训练设备,包括靠背角度调节机构,包括靠垫和靠板支架,所述靠垫粘合在所述靠板支架的上方;座椅升降机构,所述靠背角度调节机构设置于所述座椅升降机构的后上方并与所述座椅升降机构连接;步态训练机构,位于所述座椅升降机构的前方;通过协调运转,带动患者模拟正常人的行走状态进行训练,从而逐渐恢复患者的下

一种人体下肢康复训练轮椅.pdf
本发明涉及一种人体下肢康复训练轮椅,包括折叠式车架、前万向轮、带手轮圈的后轮以及两脚托板,折叠式车架底管两侧分别通过前端转轴活动连接有两脚托支管,所述折叠式车架后管两侧分别固定有两后轮轴套,每个后轮轴套内通过轴承转动套设有后轮传动轴,所述后轮传动轴另一端延伸出轴承外侧,并设有接合面,一离合螺杆轴先后穿过花鼓和后轮传动轴的中心轴孔,并延伸出接合面,对应接合面的离合螺杆轴的一端套设有可与接合面分离或联合扣接的离合转盘,所述离合转盘与脚托支管之间联接有活动连接有联动杆组件,采用该结构的人体下肢康复训练轮椅,其结

一种残疾人下肢康复训练轮椅.pdf
本发明公开了一种残疾人下肢康复训练轮椅,包括支撑板,所述支撑板的顶部嵌设有加热丝,且支撑板前后两面的左右两端均固定连接有第一支撑杆,所述第一支撑杆的顶端开设有预留槽,预留槽内腔的底部通过第一弹簧活动连接有第二支撑杆。本发明在套筒外表面的左端滑动连接了滑动器,并通过支座、第二电动伸缩杆、第二弹簧、踏板、转轴和第四支撑杆的作用,人们可根据需要通过滑动控制按键控制滑动器在套筒的位置,从而达到调节第二弹簧弹力的需求,然后人们将脚放置在踏板的上表面并用力向下压(或人们将脚放置在踏板的下表面并用力向上提),即可达到对