
图像数据的处理方法、图像处理设备以及可读存储介质.pdf

猫巷****志敏


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

图像数据的处理方法、图像处理设备以及可读存储介质.pdf
本发明涉及数字图像处理技术领域,尤其涉及一种图像数据的处理方法、图像处理设备以及可读存储介质,其中,所述方法包括:获取相机采集的第一画面帧和第二画面帧;确定所述第一画面帧中各个物体的轮廓坐标,以及确定第一画面帧和所述第二画面帧之间所述各个物体的像素质心;根据所述轮廓坐标和/或所述像素质心,确定所述各个物体中的运动物体。通过确定画面中物体的轮廓坐标和像素质心,根据轮廓坐标和/或像素质心判断物体是否为动态物体,从而剔除图像中动态物体对后续算法的干扰,提升了定位的精确度的同时减少了对后续算法的计算量,解决了如何

图像处理方法、装置、设备以及可读存储介质.pdf
本申请实施例公开了一种图像处理方法、装置、设备以及计算机可读存储介质,其中,该方法包括:获取第一图像和第二图像;从第二图像中确定出基准参考点;获取第一图像上对应基准参考点的像素点的颜色值,以及基准参考点在第二图像上的亮度值;根据基准参考点的所述颜色值和亮度值,对第一图像进行白平衡处理,得到经过白平衡处理的第三图像。采用本申请实施例,可以对像素点色度进行更好的分析,因此从第二图像中选择出的基准参考点更加准确,进而使得白平衡的效果更加自然,提升了图像处理的效果。
图像处理方法、装置、终端设备以及可读存储介质.pdf
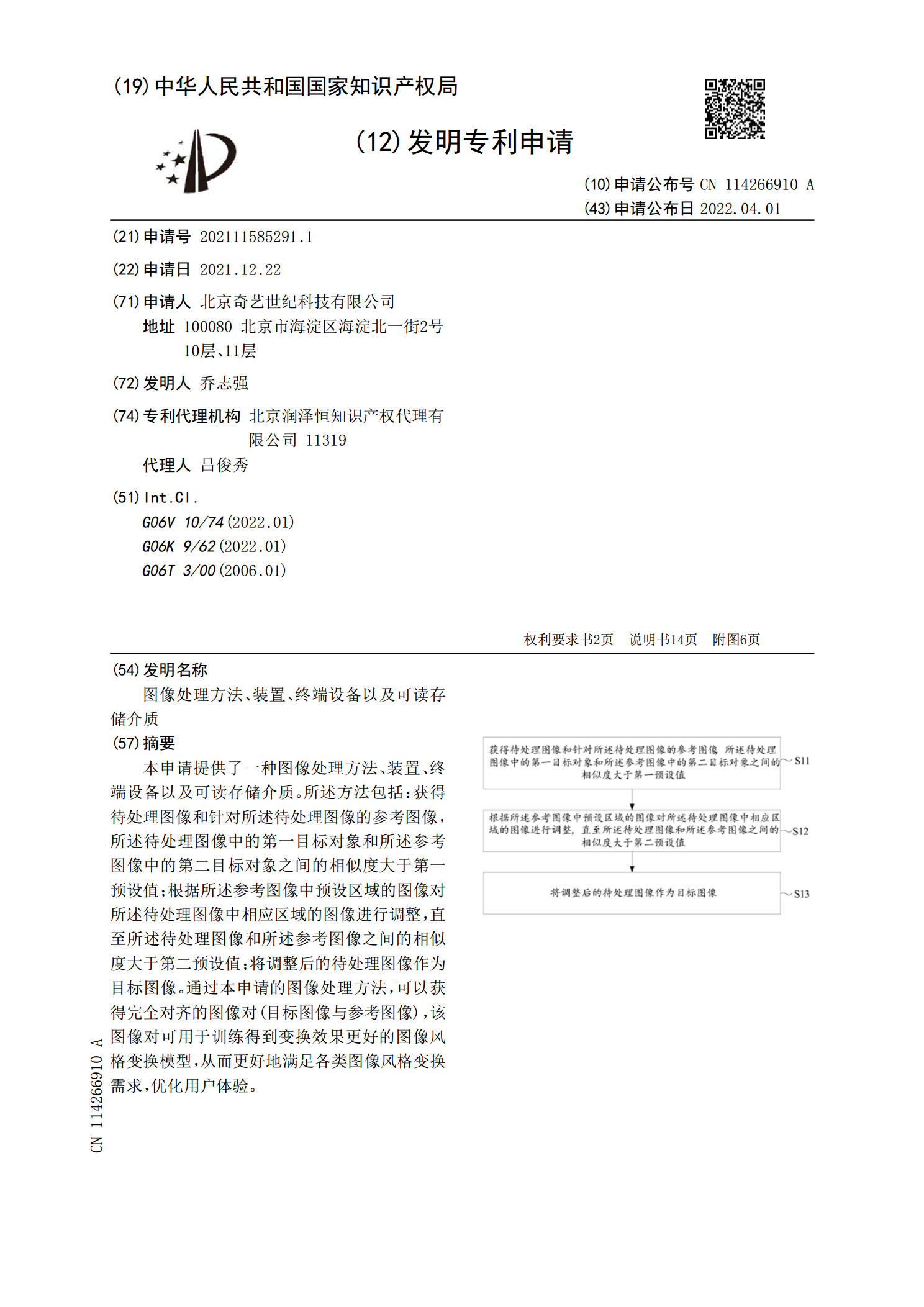
本申请提供了一种图像处理方法、装置、终端设备以及可读存储介质。所述方法包括:获得待处理图像和针对所述待处理图像的参考图像,所述待处理图像中的第一目标对象和所述参考图像中的第二目标对象之间的相似度大于第一预设值;根据所述参考图像中预设区域的图像对所述待处理图像中相应区域的图像进行调整,直至所述待处理图像和所述参考图像之间的相似度大于第二预设值;将调整后的待处理图像作为目标图像。通过本申请的图像处理方法,可以获得完全对齐的图像对(目标图像与参考图像),该图像对可用于训练得到变换效果更好的图像风格变换模型,从而
图像处理方法、装置、终端设备以及可读存储介质.pdf
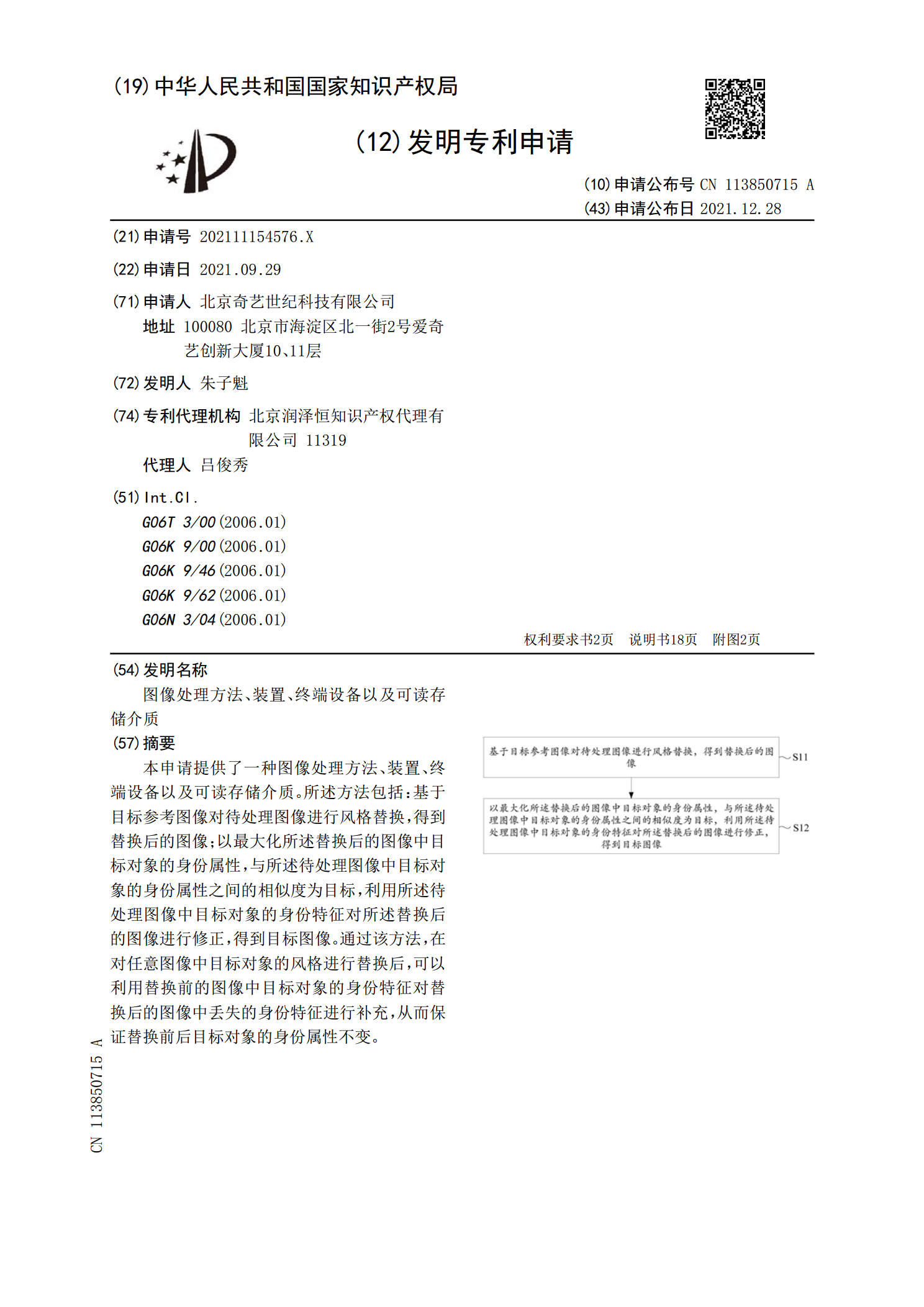
本申请提供了一种图像处理方法、装置、终端设备以及可读存储介质。所述方法包括:基于目标参考图像对待处理图像进行风格替换,得到替换后的图像;以最大化所述替换后的图像中目标对象的身份属性,与所述待处理图像中目标对象的身份属性之间的相似度为目标,利用所述待处理图像中目标对象的身份特征对所述替换后的图像进行修正,得到目标图像。通过该方法,在对任意图像中目标对象的风格进行替换后,可以利用替换前的图像中目标对象的身份特征对替换后的图像中丢失的身份特征进行补充,从而保证替换前后目标对象的身份属性不变。
图像处理方法、图像处理装置、终端设备及可读存储介质.pdf
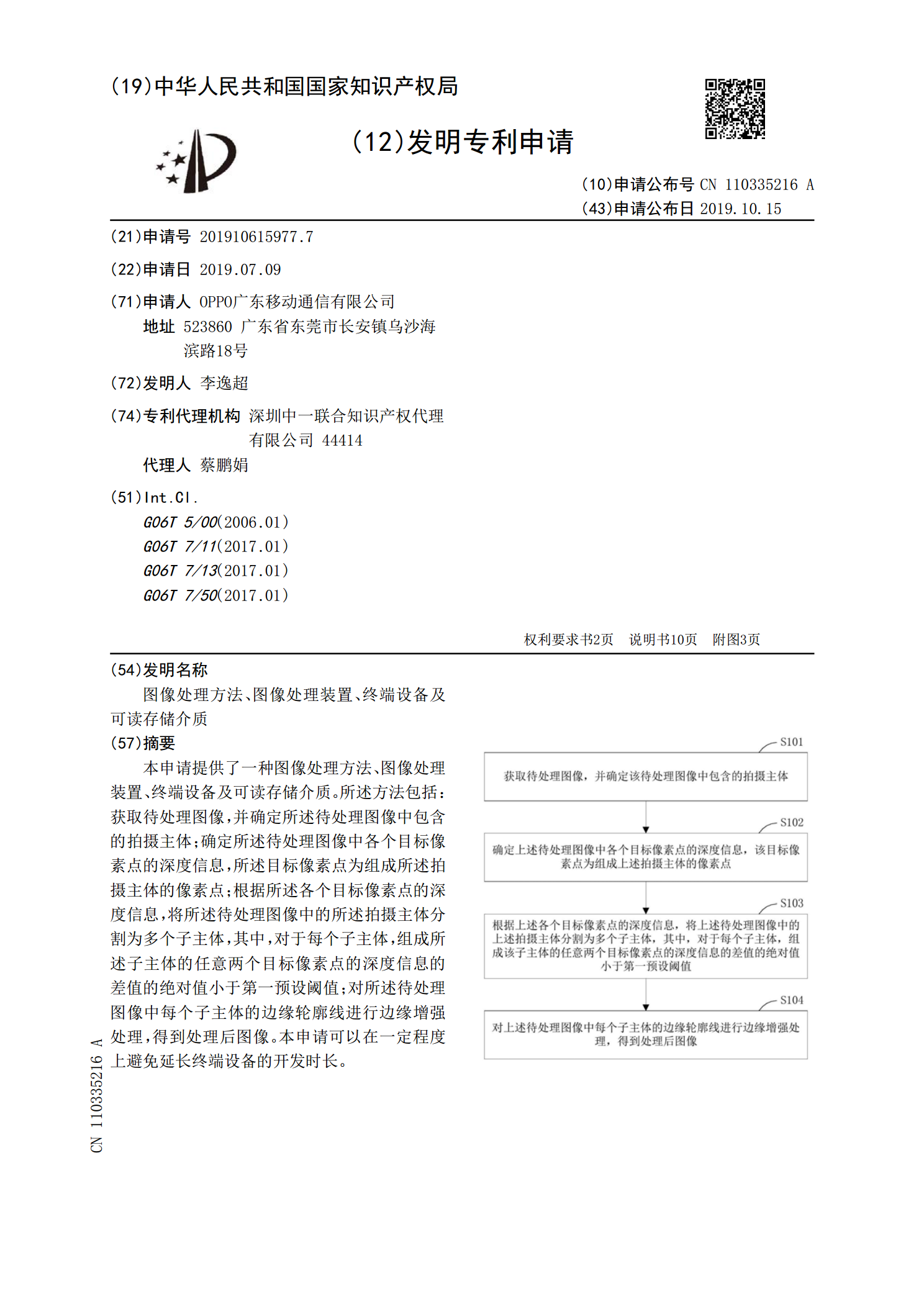
本申请提供了一种图像处理方法、图像处理装置、终端设备及可读存储介质。所述方法包括:获取待处理图像,并确定所述待处理图像中包含的拍摄主体;确定所述待处理图像中各个目标像素点的深度信息,所述目标像素点为组成所述拍摄主体的像素点;根据所述各个目标像素点的深度信息,将所述待处理图像中的所述拍摄主体分割为多个子主体,其中,对于每个子主体,组成所述子主体的任意两个目标像素点的深度信息的差值的绝对值小于第一预设阈值;对所述待处理图像中每个子主体的边缘轮廓线进行边缘增强处理,得到处理后图像。本申请可以在一定程度上避免延长