
厦门嵩屿电厂圆形煤场堆取料机简介.doc

yy****24


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

厦门嵩屿电厂圆形煤场堆取料机简介.doc
厦门华夏电力公司嵩屿电厂圆形煤场简介(一)厦门华夏电力公司嵩屿电厂二期工程配套项目--圆形煤场建设为室环保重点项目,其主要构成:圆形煤场堆取料机和圆形煤罐。圆形煤场堆取料机简介如下:1设备概况嵩屿电厂输煤系统设有直径120m封闭式圆形煤场二座,每座煤场采用一台堆取料机,堆取料机是一种大型高效的连续装卸设备,具有生产率高、能耗低、操作简便、使用寿命长等优点。圆形煤场堆取料机的堆料机采用悬臂式不俯仰结构,其堆料出力为3000t/h;取料机采用刮板式门架结构,其取料出力为1500t/h。2设备规范2.1整机参数

圆形煤场堆取料机在发电厂中的应用及维护探究.docx
圆形煤场堆取料机在发电厂中的应用及维护探究圆形煤场堆取料机在发电厂中的应用及维护摘要:随着能源需求的不断增长,煤炭作为一种主要的化石能源,在发电厂中扮演着重要的角色。圆形煤场堆取料机作为一种常见的煤炭取料设备,被广泛运用于发电厂中。本论文通过探究圆形煤场堆取料机的工作原理、优势和应用,以及维护方法,旨在解决该设备在实际使用中可能遇到的问题,以提高设备运行效率和可靠性。引言:煤炭是目前全球最主要的能源之一,在发电厂中尤为重要。有效的煤炭取料是保证发电厂正常运行的关键之一。圆形煤场堆取料机作为煤炭取料的主要设
圆形煤场堆取料机自动取料逻辑存在的问题及优化措施.pptx
,CONTENTSPARTONE取料逻辑不清晰设备故障率高维护成本高生产效率低PARTTWO优化取料逻辑设计加强设备维护保养降低设备故障率提高生产效率PARTTHREE提高设备运行稳定性降低维护成本提升生产效率增强企业竞争力THANKS!
圆形料场堆取料机.pdf
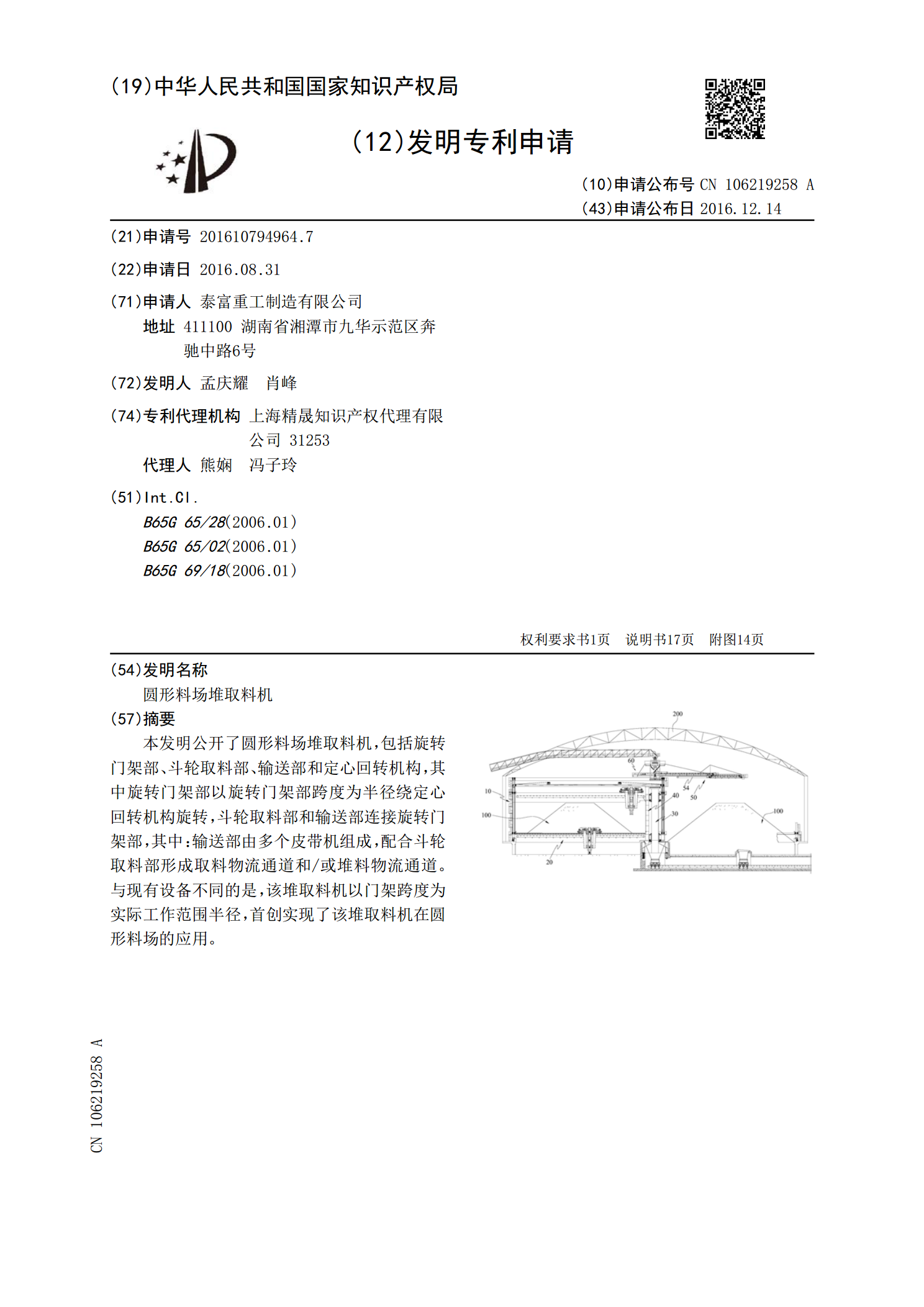
本发明公开了圆形料场堆取料机,包括旋转门架部、斗轮取料部、输送部和定心回转机构,其中旋转门架部以旋转门架部跨度为半径绕定心回转机构旋转,斗轮取料部和输送部连接旋转门架部,其中:输送部由多个皮带机组成,配合斗轮取料部形成取料物流通道和/或堆料物流通道。与现有设备不同的是,该堆取料机以门架跨度为实际工作范围半径,首创实现了该堆取料机在圆形料场的应用。

圆形堆场堆取料机自动堆料改造.docx
圆形堆场堆取料机自动堆料改造摘要对于传统的圆形堆场堆取料机,人工操作程度较高,效率低下,存在一定的安全隐患。本文针对这一问题开展了自动化改造工作,引入了先进的控制系统和传感器技术,实现了自动堆料、自动控制和远程监控。改造后的圆形堆场堆取料机具有安全可靠、效率高、智能化等优点,可满足现代生产的需求。关键词:圆形堆场堆取料机,自动化改造,控制系统,传感器技术,自动堆料,远程监控1.引言圆形堆场堆取料机是现代工业生产中常见的一种设备,广泛应用于矿山、港口、化工等领域。它具有取料速度快、取料效率高等优点,能够大大