
基于前馈技术的风电机组偏航误差测试方法.pdf

诗文****仙女

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于前馈技术的风电机组偏航误差测试方法.pdf
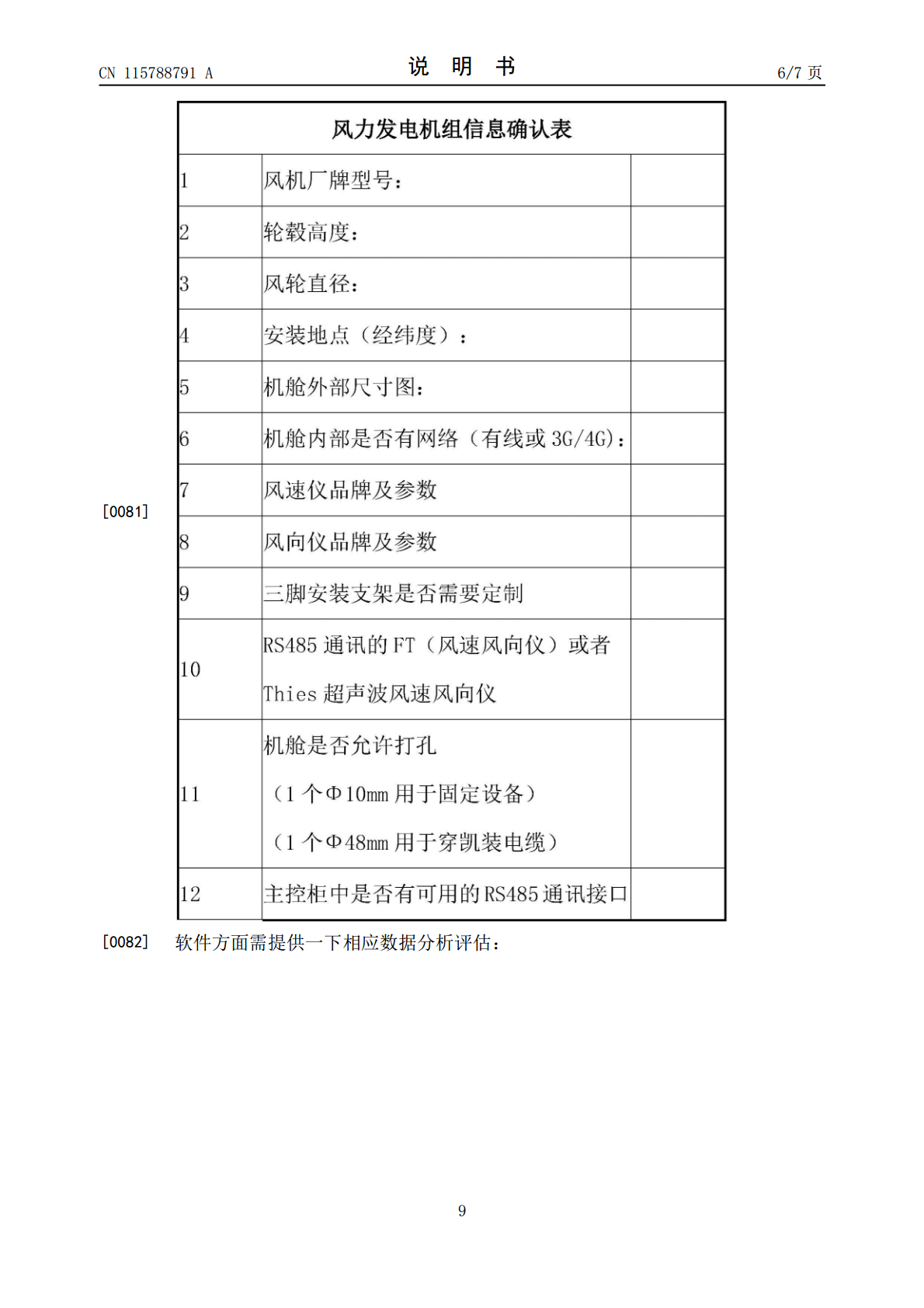
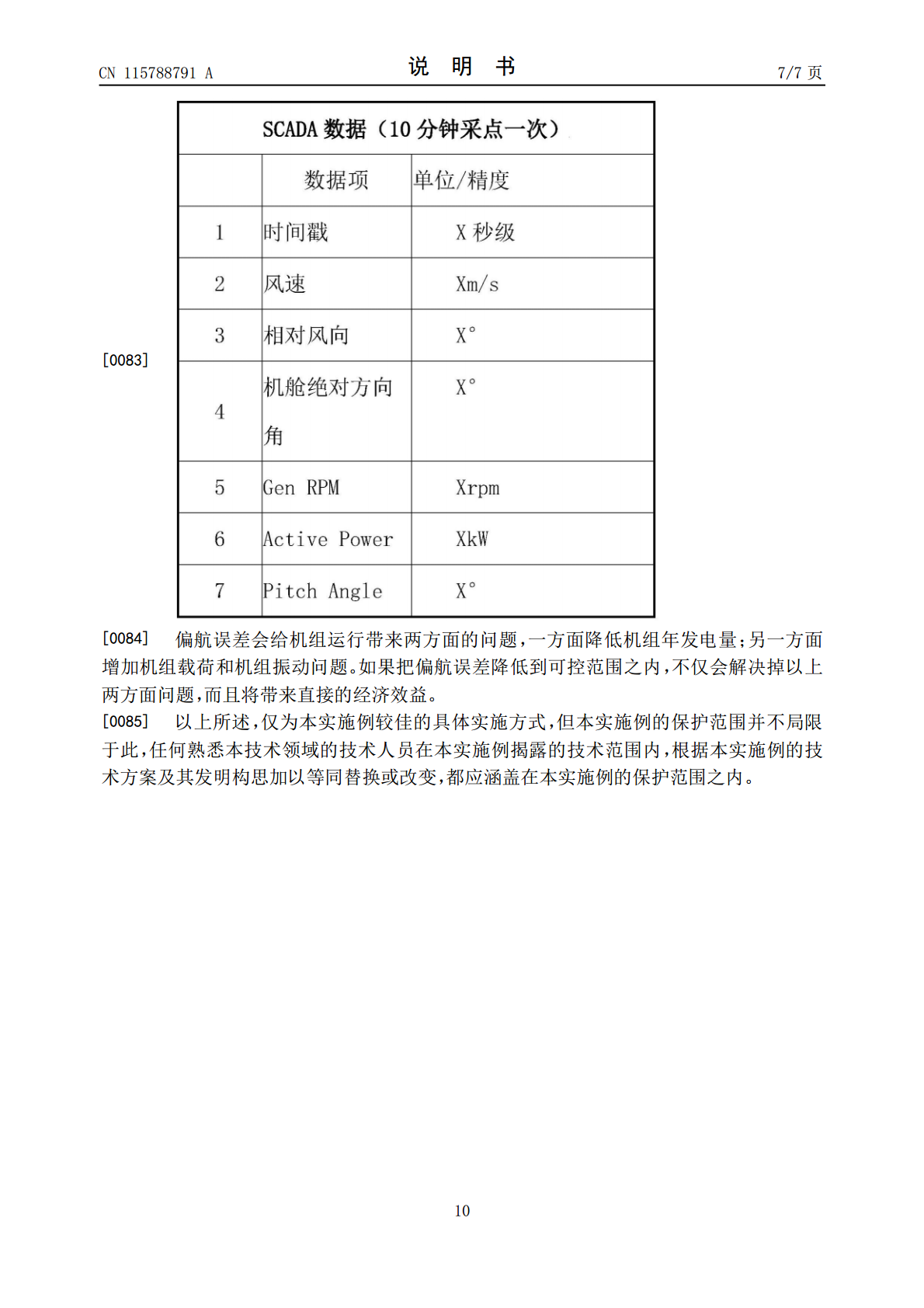
本发明属于基于前馈技术的风电机组偏航误差测试方法领域,尤其是一种基于前馈技术的风电机组偏航误差测试方法,针对现有的航机没有对航向校正的技术,偏航造成风机发电量损失的问题,现提出如下方案,其包括以下步骤:S1:在机舱顶部安装激光测风雷达测量风轮前方的风速和风向;S2:进行偏航误差矫正,包括静态矫正和动态矫正;静态矫正:通过修改offset参数实现的,即在所有风速下,对所有风向误差的检测值增加一个固定方向的偏移量,S3:技术效果验收。本发明通过分析出风机的偏航误差角度,并在主控系统中调整相应参数,从而使风机更

基于最佳叶尖速比的风电机组静态偏航误差分析及检测方法.docx
基于最佳叶尖速比的风电机组静态偏航误差分析及检测方法基于最佳叶尖速比的风电机组静态偏航误差分析及检测方法摘要:风电技术在可再生能源领域中扮演着重要的角色。风电机组静态偏航误差是影响风能利用效率的一个重要因素。本文基于最佳叶尖速比的理论,对风电机组静态偏航误差进行了分析,并提出了一种有效的检测方法。首先,通过数学模型和计算方法,分析了风电机组静态偏航误差对叶片转速、功率输出和发电效率的影响。然后,提出了利用光电传感器和数据采集系统进行实时监测和分析的方法。最后,通过实际测试和数据分析,验证了该方法的有效性。

基于风向预测的风电机组偏航控制方法研究.docx
基于风向预测的风电机组偏航控制方法研究基于风向预测的风电机组偏航控制方法研究摘要:随着风能的重要性日益增长,风电机组的偏航控制成为提高风能利用率和风电系统稳定性的关键问题。本文针对风电机组偏航控制方法进行了研究,提出了基于风向预测的偏航控制方法。该方法利用先进的风向预测算法,结合风电机组的运行状况和环境条件,实现了对风向变化的及时响应和偏航控制的优化。研究结果表明,基于风向预测的偏航控制方法能够显著提高风电机组的能量输出和稳定性。关键词:风电机组,偏航控制,风向预测,能量输出,稳定性第一章:引言随着能源需
风电机组的前馈控制方法、装置以及控制系统.pdf
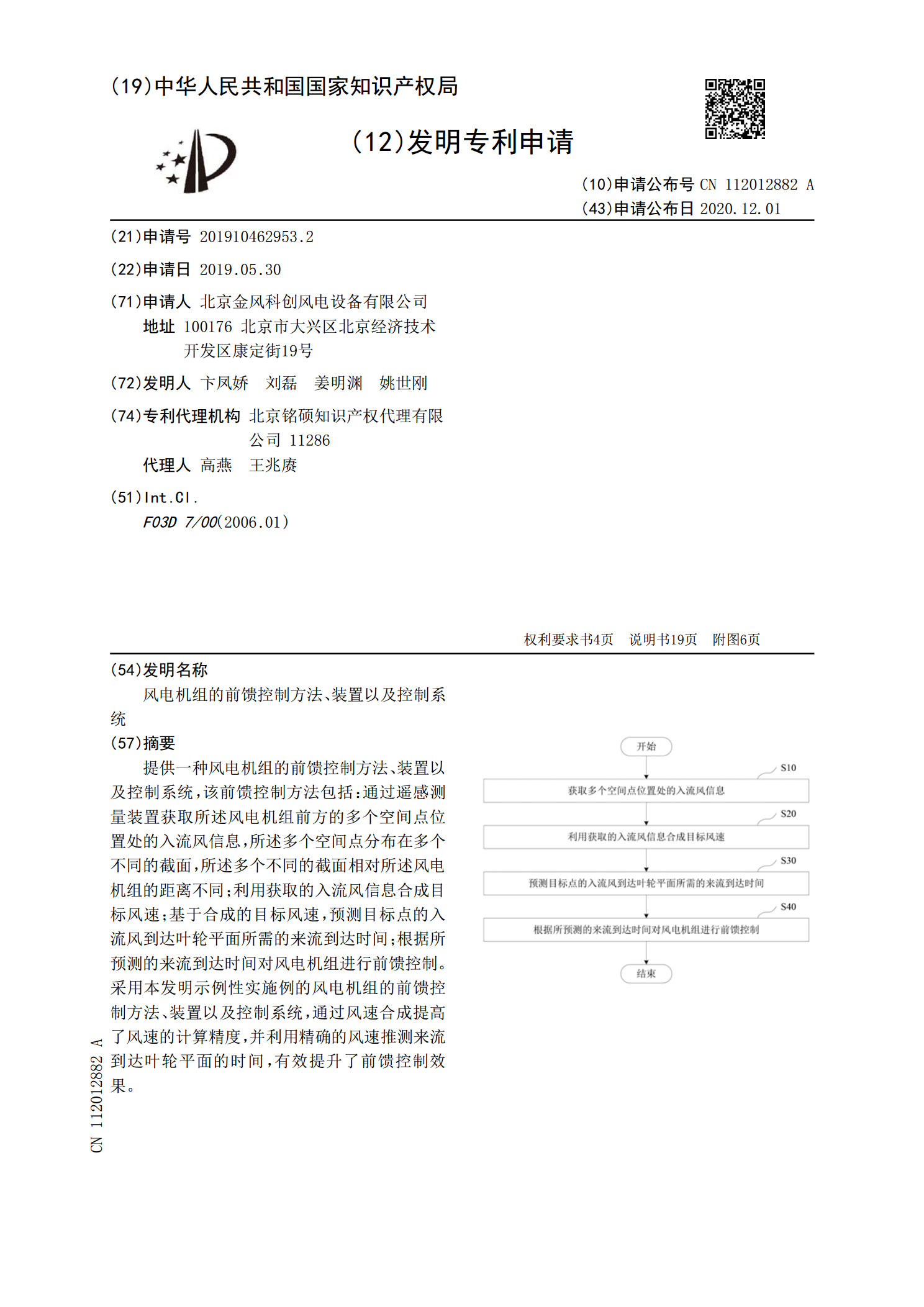
提供一种风电机组的前馈控制方法、装置以及控制系统,该前馈控制方法包括:通过遥感测量装置获取所述风电机组前方的多个空间点位置处的入流风信息,所述多个空间点分布在多个不同的截面,所述多个不同的截面相对所述风电机组的距离不同;利用获取的入流风信息合成目标风速;基于合成的目标风速,预测目标点的入流风到达叶轮平面所需的来流到达时间;根据所预测的来流到达时间对风电机组进行前馈控制。采用本发明示例性实施例的风电机组的前馈控制方法、装置以及控制系统,通过风速合成提高了风速的计算精度,并利用精确的风速推测来流到达叶轮平面的

利用激光雷达校正风电机组静态偏航误差的研究.docx
利用激光雷达校正风电机组静态偏航误差的研究摘要风能已经成为可再生能源领域的重要组成部分,风电机组的静态偏航误差是影响风能发电效率的重要因素。本文基于激光雷达技术,研究了一种校正风电机组静态偏航误差的方法。首先,通过分析风电机组的工作原理和静态偏航误差的影响机制,确定了利用激光雷达校正风电机组静态偏航误差的可行性。进一步,通过对实验数据的观测与分析,验证了利用激光雷达的方法可以有效地校正风电机组静态偏航误差,并有效提高发电效率。本文的研究成果对于提高风能发电的效率以及节约能源具有一定的指导意义。关键词:风电